

§ 2. Вращательное движение твёрдого тела.
Вращательным называется такое движение тела, при котором его точки описывают круговые траектории в плоскостях, перпендикулярных неподвижной оси вращения, с центрами на этой оси.
Положение вращающегося тела
в любой момент времени задают
углом поворота
![]() между
между
неподвижной и подвижной
плоскостями, содержащими ось
вращения.
Угол поворота
![]() считается
считается
положительным, если вращение
происходит против часовой стрелки.
Угол
![]() измеряется в радианах
измеряется в радианах![]()
![]()
У равнение
вида
равнение
вида![]() =f(t)
называется
=f(t)
называется
уравнением вращательного движения твёрдого
тела. Величина, характеризующая скорость
изменения угла поворота, называется угловой скоростью .
![]()
Для включения угловой скорости в общие векторные уравнения кинематики ей придаётся условная векторность (псевдовектор). Вектор угловой скорости совмещают с осью вращения таким образом, чтобы с положительного направления вектора видеть вращение тела против часовой стрелки (рис.14).
При таком определении вектора
угловой скорости следует, что он
является скользящим вектором
(вдоль оси вращения).
Примечание: Если равномерное
вращение измеряется в оборотах
в единицу времени, то
![]() (nc=об/с)
и
(nc=об/с)
и
![]()
 (n=об/мин)
(n=об/мин)
Векторная величина,
характеризующая быстроту изменения
вектора угловой скорости, называется
угловым ускорением
![]() .
.
![]()
Вектор углового ускорения, как и вектор угловой скорости, совпадает с осью вращения тела.
Итак, вращательное движение тела характеризуется следующими кинематическими параметрами:
- углом поворота
![]() ;
;
- угловой скоростью
![]() ;
;
- угловым ускорением
![]()
При равнопеременном вращении между ними существуют следующие связи:
где
![]() -
начальный угол вращения;
-
начальный угол вращения;![]() -
начальная угловая скорость.
-
начальная угловая скорость.
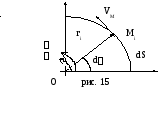
Рассмотрим теперь законы распределения скоростей и ускорений точек тела при его вращении.
По определению все точки тела
движутся по круговым траекториям
с центром на оси вращения. Выделим
произвольную точку Мi, удалённую
от оси на ri.
Воспользуемся естественным методом
вычисления её скорости и ускорения:
![]()
 м/c
м/c
Таким образом:
1.Величина вращательной(окружной)скорости точки М равна произведению угловой скорости на расстояние до оси вращения.
2.Вектор вращательной скорости касателен к окружности, которую описывает точка М, и направлен в сторону вращения.
3.Вращательная скорость тем больше, чем дальше удалена точка от оси вращения.
Ускорение точки М при вращении
определим по его составляющим:
а) Касательная составляющая:
![]()
 (м/с2
)
(м/с2
)
Примечание: Касательное ускорение при
вращении называют вращательным
![]()
б)Нормальная
составляющая:
![]() =aц
(м/с2)
=aц
(м/с2)
Примечание: Нормальное ускорение при вращении называют центростремительным.
Таким образом, полное ускорение точки при вращении определится выражением:
![]() м/c2
м/c2
Из рис.17 следует, что угол наклона
вектора полного ускорения точки при
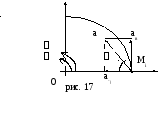 вращении
не зависит от радиуса точки М:
вращении
не зависит от радиуса точки М:
![]() f(rм
)
f(rм
)
Исходя из полученных алгебраических
соотношений между кинематическими
параметрами тела и его точек при
вращении и учитывая их векторную
сущность, можно записать эти
соотношения и в векторной форме:
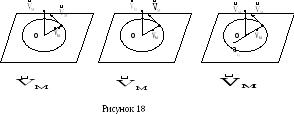
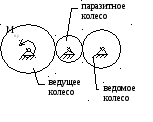
В технических устройствах различного назначения возникает необходимость передачи вращения от одних тел к другим. Как правило, это достигается с помощью передаточных механизмов, состоящих из колёс, находящихся во взаимном зацеплении (рисунок 19).
В различных конструкциях передаточных
механизмов переход от ведущих колёс к
ведомым может сопровождаться изменением
угловых скоростей и угловых ускорений,
изменением направления движения.
Пересчёт угловых скоростей и угловых
ускорений основан на равенстве
вращательных скоростей и вращательных
ускорений в точке зацепления (при
отсутствии проскальзывания) (рисунок
20) .
различных конструкциях передаточных
механизмов переход от ведущих колёс к
ведомым может сопровождаться изменением
угловых скоростей и угловых ускорений,
изменением направления движения.
Пересчёт угловых скоростей и угловых
ускорений основан на равенстве
вращательных скоростей и вращательных
ускорений в точке зацепления (при
отсутствии проскальзывания) (рисунок
20) .
Отношение угловой скорости ведущего
колеса к угловой скорости ведомого колеса
называется
передаточным числом колёсной пары:
![]() ,
где z - число зубьев на шестерёнках,
пропорциональное длинам их окружностей
l=2**R.
,
где z - число зубьев на шестерёнках,
пропорциональное длинам их окружностей
l=2**R.
VA
= 1
R1 =
2
R2
VA
= 1
R1 =
VB =
2
R2
Рисунок 20 ![]()
![]()
![]()
![]()
