

§ 2. Принцип возможных (виртуальных) перемещений.
Принцип возможных перемещений применяется для анализа условий равновесия механических систем с идеальными связями. Если механическая система находится в равновесии, то это означает, что все её материальные точки, находящиеся под действием задаваемых сил и сил реакции, находятся в равновесии. Следовательно, условие статического равновесия точек системы опишется уравнениями:

Хотя механическая система и находится в равновесии, мысленно зададим одной из точек системы малое перемещение в направлении, допускаемом её связью. При этом все или часть других точек получат соответствующие малые перемещения. Следовательно, приложенные к ним силы мысленно выполнят элементарные работы, сумма которых равна нулю.
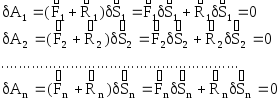
Или
![]()
Если механическая
система имеет только идеальные связи,
то
![]() по определению.
по определению.
Таким образом: Если механическая система с идеальными связями находится в равновесии, то при любом мысленном малом возможном перемещении системы сумма работ всех задаваемых сил равна нулю.
Уравнение вида
![]() называется общим уравнением статики.
называется общим уравнением статики.
Примечание 1: Под малым возможным перемещением точек механической системы, с математической точки зрения, понимается величина первого порядка малости. Это допущение позволяет в целях упрощения пренебрегать малыми величинами более высоких порядков, например:
![]() и т.д.
и т.д.
Примечание 2: Если механическая система имеет z степеней свободы, то полное равновесие по всем степеням свободы описывается числом z общих уравнений статики.
Запишем общее уравнение статики для простейшего механизма:
![]() или
или
![]()
Эти соотношения позволяют сформулировать “золотое правило” механики: Сколько выиграно в силе, столько проиграно в расстоянии ( в скорости).
§ 3. Общее уравнение динамики.
Принцип возможных перемещений можно применять и в случаях, когда механическая система не находится в равновесии. Однако в этом случае к материальным точкам системы, наряду с задаваемыми силами и силами реакции связей, для получения динамического равновесия по Даламберу, следует прикладывать силы инерции.
Запишем уравнения динамического равновесия точек системы:
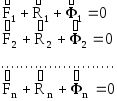
Зададим системе мысленное малое возможное перемещение, при этом силы, приложенные к её точкам, выполнят элементарные работы, сумма которых равна нулю.
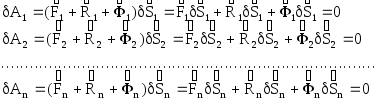
или
![]()
Если механическая
система имеет только идеальные связи,
то
![]() по определению.
по определению.
Таким образом: Для всякой механической системы с идеальными связями сумма элементарных работ всех задаваемых сил и сил инерции, условно приложенных к точкам системы, равна нулю.
Уравнение вида
![]() называется общим уравнением динамики.
называется общим уравнением динамики.
Общее уравнение динамики обычно используется для вычисления ускорений точек механической системы.
Примечание: Если механическая система имеет z степеней свободы, то для описания её полного движения требуется составить z общих уравнений динамики.
§ 4. Уравнение Лагранжа II рода.
Ускорение точек механической системы можно определять и с помощью уравнения Лагранжа II рода, являющегося дифференциальным уравнением механической системы.
Получим это уравнение для механической системы с одной степенью свободы.
Пусть механическая система задана обобщённой координатой q(t). Радиус - вектор произвольной i-той точки системы можно соответствующим образом вычислить через обобщённую координату
![]()
Тогда скорость этой точки определим:
![]()
Следовательно,
вектор скорости произвольной i - той
точки в общем случае зависит как от
обобщённой координаты q, так и от
обобщённой скорости
![]()
![]()
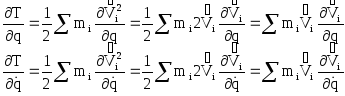
Кинетическая энергия механической системы равна сумме кинетических энергий её материальных точек.
![]()
Учитывая эту
функциональную зависимость, найдём
частные производные от кинетической
энергии по обобщённой координате q и
обобщённой скорости
![]()
по правилу Лопиталя
![]()
Таким образом:
![]()
![]()
Продифференцируем последнее уравнение по времени:

Таким образом:
![]() =
=![]()
Рассмотрим физический смысл выражения, стоящего в правой части полученного уравнения.
![]() =
=![]() -
есть сумма элементарных работ задаваемых
сил, приложенных к точкам системы. Эту
сумму работ можно представить как
некоторую обобщённую силу Q механической
системы, умноженную на элементарное
перемещение обобщённой координаты,
т.е.
-
есть сумма элементарных работ задаваемых
сил, приложенных к точкам системы. Эту
сумму работ можно представить как
некоторую обобщённую силу Q механической
системы, умноженную на элементарное
перемещение обобщённой координаты,
т.е.
![]() =Qi
=Qi![]()
Следовательно,
![]() /
/![]() -
обобщённая сила системы.
-
обобщённая сила системы.
Окончательно получим уравнение Лагранжа II рода:
![]() =
Q
=
Q
Примечание: Если механическая система имеет z степеней свободы, то для описания её полного движения требуется составить z уравнений Лагранжа II рода:
![]()
![]()
. . . . . . . . . . . .
![]()
При использовании уравнений Лагранжа II рода рекомендуется придерживаться следующей последовательности:
1. Изобразить на рисунке механической системы активные силы( и моменты от пар сил).
2. Выбрать обобщённую координату.
3. Выразить кинетическую энергию системы через обобщённую скорость и обобщённую координату.
4. Вычислить обобщённую силу системы, для чего определить сумму элементарных работ всех активных сил и разделить её на приращение обобщённой координаты.
Решить уравнение Лагранжа II рода.