

Тема 3. Произвольная система сил.
§ 1.Теорема о параллельном переносе силы.
Т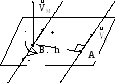 еорема:
Силу можно эквивалентно переносить
параллельно самой себе в любую точку
твёрдого тела, добавляя при этом пару
сил с моментом, равным произведению
этой силы на расстояние между линиями
действия.
еорема:
Силу можно эквивалентно переносить
параллельно самой себе в любую точку
твёрдого тела, добавляя при этом пару
сил с моментом, равным произведению
этой силы на расстояние между линиями
действия.
Пусть сила F приложена в точке А.(рис.18).
Рис.18
Для параллельного переноса этой силы в новой точке приложения В приложим две взаимно.
Полученная система, составленная из 3-х сил эквивалентна одной исходной силе. С другой стороны система из 3-х сил эквивалентна одной силе F, приложенной уже в точке В и паре сил, момент которой равен
М = F * h.
Теорема доказана.
§ 2.Теорема о приведении произвольной системы сил к заданному центру(основная теорема статики).
Теорема: произвольную систему сил можно привести к заданному центру в виде главного вектора сил и главного вектора моментов.
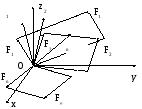
Пусть задана система сил F1;F2...Fn как угодно расположенных в пространстве, заданном координатами XYZ (рис.19).
Используя теорему о параллельном
переносе силы, перенесём все силы
системы в начало координат О.
Каждая переносимая сила Fi
 изобразится
равным вектором
изобразится
равным вектором
с добавлением вектора момента,
перпендикулярного плоскости, в
которой лежит переносимая сила.
В результате в точке О получим
систему сходящихся сил и систему
сходящихся моментов.
Рис 19.
Складывая векторно силы и моменты, получим:
1.Один вектор сил, называемый главным вектором сил системы.
2.Один вектор моментов, называемый главным вектором моментов системы сил.
Теорема доказана.
Главный вектор
сил
![]()
и главный
момет системы сил
и главный
момет системы сил
![]()
можно представить в виде проекций на
оси координат:
можно представить в виде проекций на
оси координат:
![]() ,
,
где FглX=F1x+F2x+...+Fnx;
![]()
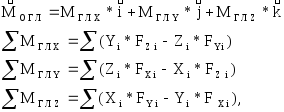
так что
![]()
Главный вектор системы сил не зависит от выбора центра приведения (полюса), а главный момент- зависит.
Из приведённых рассуждений вытекают два важнейшие свойства:
1.Главный вектор сил системы не зависит от выбора местоположения точки приведения О.
2.Главный момент сил изменяется при изменении местоположения точки приведения О.
Интересно отметить, что при приведении некоторой системы сил к заданному центру могут встретиться четыре различных случая.
1 случай: Система
сил в точке О приводится к главному
вектору сил и главному моменту :
![]() (этот случай разобран выше).
(этот случай разобран выше).
2 случай: Система
сил в точке О приводится только к главному
вектору сил.
![]()
В этом случае говорят, что система сил приводится к равнодействующей. Заметим, что при выборе любого другого центра приведения 2-й случай переходит в 1-й случай (смотри ниже теорему Вариньона).
3 случай: Система
сил в точке О приводится только к главному
моменту системы сил:
![]()
В этом случае говорят, что система сил приводится к паре сил с главным моментом. Поскольку вектор пары сил является свободным, то 3-й случай будет справедлив для любого центра приведения.
4 случай: Система
сил в точке О приводится к отсутствию
главного вектора сил и главного момента
системы сил
![]()
Из предыдущего следует, что это сочетание остаётся справедливым для любого центра приведения. 4-й случай соответствует условию равновесия заданной системы сил.