

§ 5. Применение методов аналитической механики для анализа поведения механических систем в некоторых частных случаях.
А: Исследование условий равновесия механических систем.
При рассмотрении принципа возможных перемещений было показано, что условием равновесия механической системы с идеальными связями, имеющей z степеней свободы, является равенство нулю элементарных работ задаваемых сил по всем степеням свободы:
![]() ;
;![]() ;
. . . .
;
. . . .![]()
Но как показано в § е 3 темы 4, элементарная работа потенциальных сил равна элементарному изменению потенциальной энергии, взятой с обратным знаком, т.е.
![]() ;
;
![]() ;
;![]()
где q1; q2;...qz - соответствующие обобщённые координаты.
Следовательно, можно записать:
dП=![]() ,
где
,
где
dП - полный дифференциал потенциальной энергии механической системы.
Следовательно, для механической системы с потенциальными силами условием равновесия может служить dП=0.
Математически это означает, что потенциальные силы обеспечивают равновесие системы в тех случаях, когда потенциальная энергия находится в экстремуме по отношению к обобщённым координатам.
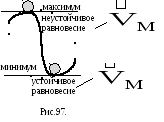
При этом равновесие может быть
устойчивым и неустойчивым. Из рис.97 можно наглядно уяснить признак устойчивости равновесия
( признак Лагранжа-Дирихле):
“ Потенциальная система находитсяустойчивом равновесии
в окрестности минимума потенциальной энергии”.
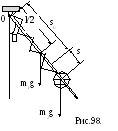
Пример: Исследовать, при каких значениях обобщённых координат потенциальная механическая система с двумя степенями свободы находится в устойчивом равновесии.
 Дано:
m1
- масса стержня;
Дано:
m1
- масса стержня;
l - длина стержня;
S0 - собственная длина пружины;
C - коэффициент жёсткости пружины;
m2 - масса груза.
Выбираем обобщённые координаты:
q1=; q2=S
Найдём условия равновесия по и S.
Для этого запишем выражение для потенциальной энергии относительно оси
подвеса О:
![]()
а) Исследуем равновесие по :
![]()
Условиями равновесия является sin=0 (1=0; 2=)
Условием устойчивого
равновесия является
![]()
0, т.е.
0, т.е.
![]()
![]() 0 при =0.
0 при =0.
б) Исследуем равновесие по S:
![]() Sравнов.=
Sравнов.=![]()
![]() 0
- устойчивость равновесия обеспечивается
при любой статической деформации
пружины.
0
- устойчивость равновесия обеспечивается
при любой статической деформации
пружины.
Так при =0
Sст=
![]()
при =![]() Sст=
-
Sст=
-
![]()
Б: Применение уравнений Лагранжа II рода для исследования колебаний механических систем.
В теме 11 рассматривались колебания материальной точки. В частности было показано, что свободные колебания с учётом вязкости описываются дифференциальным уравнением:
![]() ,
где 2n=
,
где 2n=![]() ;
;![]()
При n k решение этого уравнения имеет вид:
![]() или
или
![]() ,
где
,
где
![]()
Механические системы под действием восстанавливающих сил также могут совершать колебания относительно равновесного положения.
Рассмотрим пример исследования таких колебаний для механических систем с одной степенью свободы.
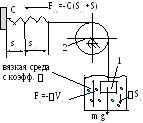 Дано: m1;
m2;
C;
Дано: m1;
m2;
C;
![]() .
.
Определить период затухающих
колебаний.
Замечаем,
что Sст=![]() .
.
Для решения используем уравнение
Лагранжа II рода.
![]()
Рис.99.
Итак q=S1;
![]() .
.
Найдём кинетическую энергию системы:
 ;
;
![]() ;
;
![]() =
=![]() a1=
a1=
![]()
![]() ;
;![]()
Найдём обобщённую силу системы, для чего зададим ей малое возможное перемещение S1.
![]() =
=
![]()
![]() ,
где m1g=CSст,
так что
,
где m1g=CSст,
так что
Q1=![]()
Окончательно уравнение Лагранжа II рода в данном случае запишется:
![]()
![]() =
=![]() или
или
![]()
Перепишем его в каноническом виде:
![]() ,
где
,
где
![]() .
.
Искомый период:
T=![]() .
.