

§ 3. Теорема о движении центра масс механической системы.
Существуют задачи, в которых исследование движения механической системы сводится к закону движения лишь одной её характерной точки - центра масс. Дифференциальное уравнение движения центра масс механической системы легко можно получить из системы уравнений (1), описывающих движение её материальных точек.
Сложив почленно слагаемые, будем иметь:
![]()
Учитывая, что радиус-вектор центра масс определяется выражением:
![]() или
или
![]()
После двойного дифференцирования будем иметь:
![]()
Кроме того учтём,
что
![]()
Окончательно
получим:
![]()
Полученное соотношение позволяет сформулировать Теорему о движении центра масс механической системы:
Центр масс механической системы движется как одна материальная точка с массой системы, в которой приложены все внешние силы.
Рассмотренная теорема имеет важные следствия:
1. Внутренние силы не могут изменить характер движения центра масс механической системы.
2. Пара сил, приложенная к твёрдому телу не может изменить характер движения его центра масс.
Если главный вектор внешних сил механической системы равен нулю, то её центр масс находится в покое, либо движется прямолинейно и равномерно ( по инерции).
§ 4. Понятие о моментах инерции твёрдого тела.
Как известно, масса тела является мерой инертности тела. При движениях, связанных с вращением тела относительно полюса или оси определяющим в инерционных свойствах становится не сама масса, а закон её распределения относительно полюса или оси.
Скалярная величина, характеризующая закон распределения её массы относительно полюса или оси, называется моментом инерции.
В соответствии с определением различают:
- момент инерции относительно полюса I0 (полярный момент инерции);
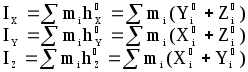
- моменты инерции относительно координатных осей IX,IY,IZ (осевые моменты инерции).
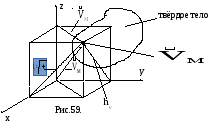
Моменты инерции тела равны сумме произведений масс точек тела на квадрат расстояния до полюса или соответствующих осей (рис.61).
I0=![]()
Легко убедиться, что IX+Iy+IZ=2*I0.
Примечание: Если твёрдое тело - плоская фигура, располагающаяся в плоскости XY, то для всех точек фигуры Z i=0. Следовательно,
![]()
Следовательно, IZ=I0.
Таблица 1.
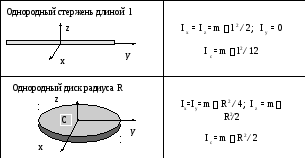
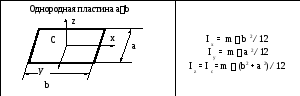
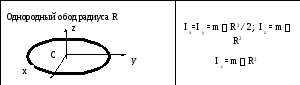
Моменты инерции тел могут быть получены либо расчётным, либо опытным путём и приводятся в специальных справочниках. В таблице 1 приведены моменты инерции некоторых тел относительно координатных осей, проходящих через начало координат:
Момент инерции твёрдого тела относительно заданной точки или оси, например оси Z, можно представить в виде произведения массы тела на квадрат линейной величины, называемой радиусом инерции тела относительно этой оси (точки).
![]()
Эта формула
показывает, что радиус инерции
![]() определяет расстояние от оси Z до точки,
в которой нужно сосредоточить всю массу
тела чтобы момент инерции точки был
равен моменту инерции тела.
определяет расстояние от оси Z до точки,
в которой нужно сосредоточить всю массу
тела чтобы момент инерции точки был
равен моменту инерции тела.
Единицей измерения момента инерции является 1 кГм2.
Оси координат, проходящие через центр тяжести тела, называются центральными. Для пересчёта моментов инерции на нецентральные оси пользуются теоремой Штейнера.
Теорема Штейнера: Момент инерции относительно нецентральной оси равен моменту инерции относительно параллельной ей центральной оси плюс произведение массы тела на квадрат расстояния между осями.
![]()
Действительно, из рис.60 следует:
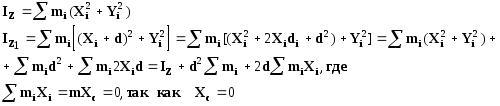
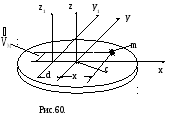
Окончательно,
![]() .
.