

1.2.3. Тиристорні регулятори напруги змінного струму
Лекція 7. Тиристорні регулятори напруги (ТРН) змінного струму. Призначення, схемні рішення силової частини, динамічні властивості, характеристики керування, режими роботи ТРН.
Рекомендації по вибору та параметри серійних ТП, ШІП, ТРН.
Завдання на СРС. Розрахунок параметрів передаточної функції ТРН, врахування нелінійностей у математичній моделі. Використання ТРН в системах електроприводу.
Література: 1, с.55-61; 2, с.70-74; 1б, с.167-171.
Питання для самоконтролю:
Тиристорний регулятор напруги змінного струму. Призначення, принцип роботи, схемні рішення силових ключів, побудова кривої вихідної напруги.
Динамічні властивості тиристорного регулятора напруги.
Режими регулювання швидкості, електричного гальмування і реверсу асинхронного двигуна при живленні від тиристорного регулятора напруги.
Останнім часом розроблена значна кількість схем вмикання тиристорів, які дозволяють комутувати статорні кола асинхронного двигуна і регулювати на ньому напругу. За допомогою комутуючих та регулюючих тиристорних елементів (ТЕ) можна здійснити:
пуск, реверс, гальмування асинхронного двигуна, а також обмеження струму, ривка або моменту, точну зупинку;
безударне перемикання швидкостей багатошвидкісного двигуна;
фіксоване зменшення або отримання низької стійкої "повзучої" швидкості;
крокуючий або вібраційний режим;
плавне регулювання швидкості, моменту та ін.
Основні варіанти схем одно ‑ і трифазних ТЕ показані на рис. 1.2.33; при керуванні асинхронним двигуном вони можуть вмикатись між мережею живлення й обмотками статора або в розсічку нульової точки обмоток статора.
Розглянемо особливості схем ТЕ стосовно до трифазних асинхронних двигунів. Схема, яку показано на рис. 1.2.33,а, найбільш поширена і може бути використана для будь-якої схеми з’єднання обмоток статора. При синусоїдальному струмі в навантаженні кожний тиристор працює по черзі протягом 180° і комутує відповідну півхвилю напруги живлення. На рис. 1.2.33,б два зустрічне ввімкнених тиристори замінені симистором.
При використанні схеми рис. 1.2.33,в тиристор VS комутує обидві півхвилі напруги мережі, і тому частота імпульсів керування повинна бути рівною подвійній частоті напруги живлення. Схема, яка показана на рис. 1.2.33,г, складається з двох тиристорів та двох діодів; за можливостями керування, навантаження за струмом і максимальній прямій напрузі тиристорів вона аналогічна схемі на рис. 1.2.33,а.
На рис. 1.2.33,д,е,ж показана група трифазних ТЕ, які можна вмикати тільки в розсічку нульової точки статорних обмоток (або в ланцюги ротора). Тому такі схеми можна використовувати тільки при керуванні нереверсивними асинхронними двигунами, якщо не враховувати можливості додаткових комутуючих пристроїв, які забезпечують реверс двигуна.
Схема,
яку наведено на рис. 1.2.33,д, складається
з мінімальної кількості вентилів, вона
ставить певні вимоги до діапазону зміни
кута відпирання тиристорів:
![]() ,
де
,
де
![]() ‑ фазовий кут навантаження.
‑ фазовий кут навантаження.
Схеми на рис. 1.2.33,е,ж являють собою різновидності трифазних мостових схем випрямлення. При використанні схеми на рис. 1.2.33,ж необхідно застосовувати додаткові елементи для запирання тиристора VS тому, що він практично комутує постійний струм. Відмітимо, що застосування схем, наведених на рис. 1.2.33,д,е,ж, включає з’єднання обмотки статора в трикутник або зірку з нульовим проводом.
Аналіз схем ТЕ показує, що залежно від прийнятої схеми асинхронний двигун мав різні властивості з керованості і можливостей реалізації різних режимів. Перш, ніж вибрати найбільш раціональну із схем, необхідно визначити вимоги до цих схем i комплекс задач, які повинні бути розв’язані при використанні ТЕ.
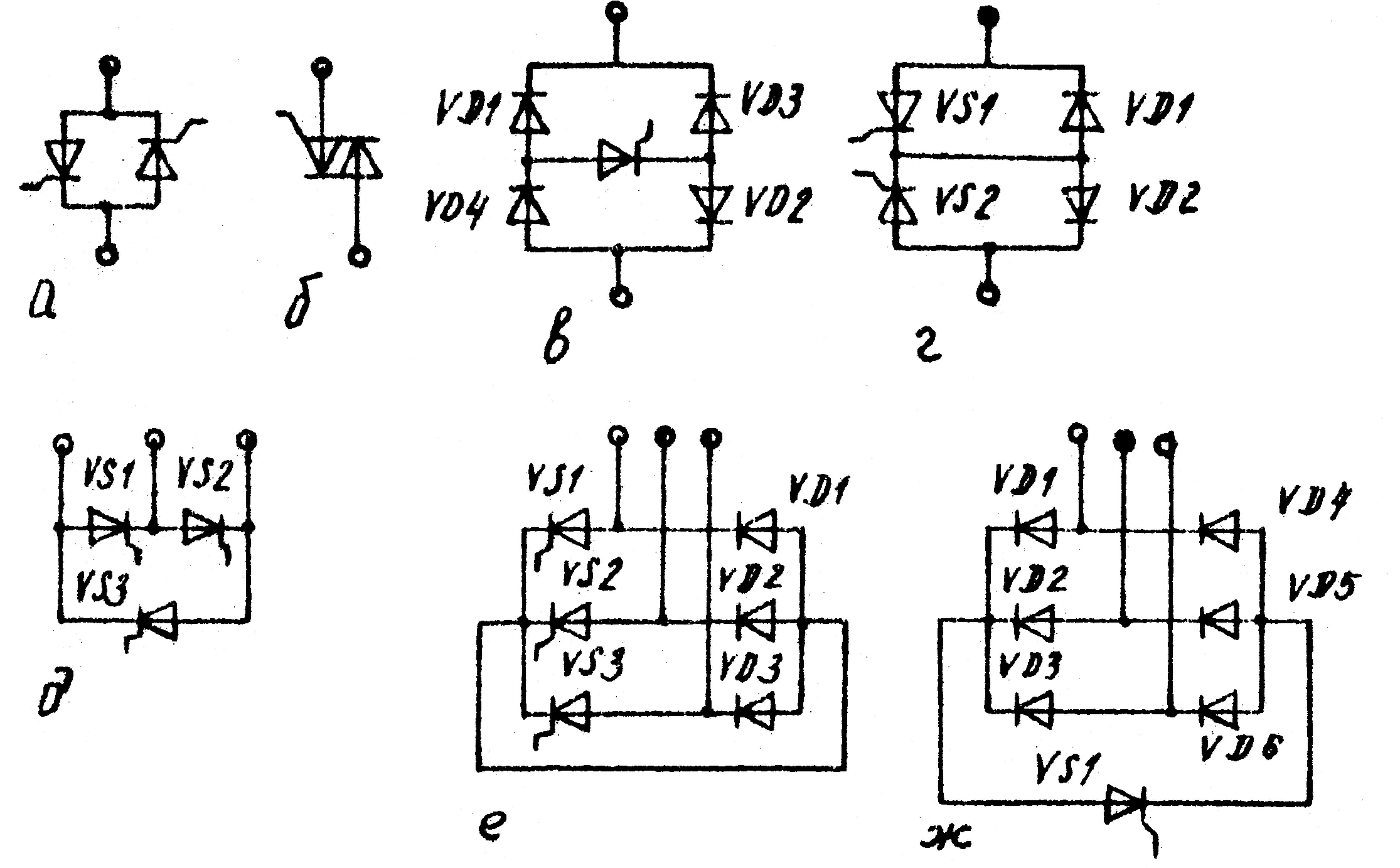
Рис. 1.2.33
Так, при необхідності здійснити швидку зупинку можна застосувати індукційно-динамічне гальмування, скориставшись для цього схемою на рис. 1.2.34. Остання реалізує динамічне гальмування разом з коротким замиканням. Динамічне гальмування відбувається кожні півперіоду, які відповідають проводящому напряму тиристора VS1 i непроводящому напряму тиристора VS2. Коротке замикання відбувається через тиристор VS2 в кожний непроводящий для VS1 півперіод напруги мережі живлення. При цьому постійна складова струму збільшується, а його перша гармоніка зменшується під впливом зворотного вентиля, що також збільшує ефективність гальмування. Гальмування за схемою на рис. 1.2.34 виявляється більш дійовим порівняно з використанням тільки постійного струму.
"Повзучу" швидкість можна отримати при одночасному протіканні по обмотках статора постійних та змінних складових струмів. Одна з найпростіших схем отримання "повзучих" швидкостей показана на
рис. 1.2.35. Однак в схемі не вдається забезпечити рівність постійного струму в усіх фазах і це зумовлює перехід двигуна до вібраційного режиму роботи. Особливо важливо реалізувати безвібраційний режим при великих кутах керування.
Під час загального розгляду питань створення керованого асинхронного тиристорного електроприводу бажано, щоб блок ТЕ забезпечив практично всі режими асинхронного двигуна (пуск в обох напрямах, динамічне гальмування й противмикання, реверс, регулювання швидкості). При конкретному застосуванні не всі ці режими можуть виявитись необхідними для керування виробничим механізмом. Проте, найбільш правильний підхід до вирішеная цієї проблеми - утворення універсальних блоків тиристорного керування, які здатні забезпечити повну керованість асинхронного двигуна.
Для розробки універсальних блоків керування асинхронними двигунами можуть стати в пригоді тільки схеми, показані на рис. 1.2.33,а,в,г. Схема ж на рис. 1.2.33,в громіздка через те, що містить п’ять напівпровідникових вентилів, а завантаження тиристорів по струму в ній вдвоє більше порівняно із схемами на рис. 1.2.33,а,г. Крім того, схема ТЕ на рис. 1.2.33,в ставить додаткові вимоги до керуючого пристрою тиристора і призводить до підвищеного спаду напруги в регулюючому елементі. При однаковій кількості тиристорів та інших загальних властивостях схем на рис. 1.2.33,а,г остання з них потребує додатково ще двох діодів, в результаті чого в схемі забезпечується відсутність зворотних напруг на тиристорах. Однак, ця обставина не відіграє істотної ролі при виборі тиристорів для керування асинхронним двигуном. Таким чином, найбільш раціональною схемою однофазного ТЕ, придатного для створення універсальних блоків керування асинхронними двигунами, є схема, яка складається з двох зустрічно-паралельно ввімкнутих тиристорів (рис. 1.2.33,а).
Для керування асинхронними двигунами в електроприводах застосовуються схеми, показані на рис. 1.2.36, всі вони, за винятком схеми рис. 1.2.33,д, складаються з однофазних ТЕ за схемою рис. 1.2.33,а.

Рис. 1.2.34 Рис. 1.2.35

Рис. 1.2.36
При сталій частоті мережі живлення для заданого ковзання момент асинхронного двигуна пропорційний квадрату напруги живлення. Оскільки, усталений режим роботи настає при рівності моментів двигуна й навантаження, ковзання ротора залежить від моменту навантаження і напруги живлення. Тому регулювати кутову швидкість можна плавним змінюванням напруги при незмінній частоті.
Пристрої, які побудовані на основі універсальних блоків керування і забезпечують плавне регулювання напруги, називають тиристорними регуляторами напруги (ТРН). На рис. 1.2.37 показана принципова схема силової частини ТРН.
Для
регулювання напруги, яка підводиться
до статора двигуна, можна використати
імпульсно-фазовий або інтегро-імпульсний
методи регулювання. При імпульсно-фазовому
регулюванні зміна співвідношення часу
відкритого і замкнутого станів ТЕ
відбувається протягом одного періоду
напруги живлення шляхом змінювання
кута керування
![]() .
При інтегро-імпульсному напруга
регулюється зміною числа півперіодів
відкритого та закритого станів вентилів.
.
При інтегро-імпульсному напруга
регулюється зміною числа півперіодів
відкритого та закритого станів вентилів.
Особливості
динаміки КВ визначаються сталою часу
![]() системи керування тиристорами і чистим
запізненням
системи керування тиристорами і чистим
запізненням
![]() .
У лінійному наближенні передаточну
функцію ТРН можна подати так:
.
У лінійному наближенні передаточну
функцію ТРН можна подати так:
 (1.2.15)
(1.2.15)
де
![]() (визначають за характеристикою пристрою
імпульсно-фазового керування тиристорами).
Часто на практиці можна знехтувати
величинами
(визначають за характеристикою пристрою
імпульсно-фазового керування тиристорами).
Часто на практиці можна знехтувати
величинами
![]() і
,
тоді ТРН являє собою безінерційну ланку.
і
,
тоді ТРН являє собою безінерційну ланку.
При регулюванні швидкості асинхронних двигунів зміною напруги на статорі в колах ротора спостерігаються втрати переважно в додаткових опорах, що несприятливе для електроприводів.

Рис. 1.2.37
Тому керування напругою статора асинхронних двигунів використовується в ряді випадків для кранових електроприводів або для приводів вентиляторів. Область застосування керування напругою асинхронних двигунів обмежується невеликими потужностями (Р < 50 кВт).