

5.Функция полезности. Отношение к риску.
До сих пор не принималось во внимание, кто же делает выбор, предпочитает он риск или стабильность. Теория полезности позволяет принимающему решение влиять на результат исходов, согласно своим оценкам полезности. одно и то же правило в данном случае приводит к разным. решениям у разных людей в зависимости от их запросов. Для примера рассмотрим 2 варианта вложения 1000$:
По 1му варианту можно без риска получить 10% годовых прибыли на капитал, т.е. к концу года получить 1100$;
По другому варианту можно его удвоить за год, либо потерять.
Какой вариант вложения выбрать зависит от того кто делает выбор – миллионер или студент. Одно из основных понятий экономической теории состоит в том, что человек делает рациональный выбор. Количественно рациональность выбора определяется f-ей полезности.
Полезностью называют величину, которую в процессе выбора max-рует ЛПР(Лицо,Принимающее Рш-е)
f полезн-ти запис-ся с.о.:
Пусть х и у – различные исходы, результатов выбора. Р – вер-ть того или иного исхода, u(x),u(y) – цена исходов х и у.
Аксиома1. х предпочтительнее у ттогда u(x)>=u(y) (xRy, если u(x)>=u(y))
f полез-ти: u(x,p,y)=pu(x)+(1-p)u(y), где u(x,p,y) – это численная f полез-ти. Теория полезности экспериментально подтверждается в «з-че о вазах».
6.Задача аналитического конструирования оптимального регулятора (Аккор).
Р ассмотрим
линейный объект, описываемый уравнением
ассмотрим
линейный объект, описываемый уравнением
x(∙)=ax+bu (a, b - const) x(∙)(0)=x0
Здесь х- отклонение фазовой координаты процесса от программного движения.
Необходимо построить закон регулятора u(x), кот минимизировал бы отклонение х от программного движения или же закон регулятора, который минимизировал бы интеграл
J=∫(cx2+mu2)dt→min, где с и m- const имеющие большую величину, кот выб-ся так, чтобы х и u были малыми величинами. Здесь 2-ое слагаемое под знаком интеграла штраф на управление. Поскольку, на управление расходуется некоторая энергия, то ее как и отклонение х необходимо минимизировать. Составим полную производную от функции V:
DV/dt=∂V/∂t+∂V/∂x*x(•)=∂V/∂t+∂V/∂x(ax+bu)
Подставим ее и значение функционала Ј в уравнение (6)
min(∂U/∂t+∂V/∂x(ax+bu)+cx2+mu2)=0
Поскольку никаких ограничений на управление нет, то для определения min выражения в скобках достаточно вычислить производную и приравнять ее к 0.
K=∂V/∂t+∂V/∂x(ax+bu)+cx2+mu2
∂k/∂u=0
∂k/∂u=b*∂ν/∂x+2mu=0(9)
∂k2/∂2u=2m>0
Из (9) следует: u0=-b/2m*∂V/∂x (10)
В этом законе не известна производная ∂V/∂x. Для ее определения подставим u0 в выражение (7)
(∂V/∂t+cx2+mu2)U0=0
(∂V/∂t+∂V/∂x(ax+bu0)+cx2+mu2=0
∂V/∂t+(∂V/∂x)*ax+cx2-b2/4m(∂V/∂x)2=0 (11)
Из решения этого уравнения следует выражение V(x,t) подставляя кот в уравнение (10) получим закон, АКОР в виде u0=u0(x,t). В соответствии с которым регулятор будет иметь переменную структуру. При одном и том же отклонении α, в различные моменты времени будут иметь различный коэф.усиления.
Для построени регулятора постоян. Структуры положим ∂V/∂t=0, тогда (11) примет вид:
(∂V/∂x)2-4max/b2*(∂V/∂x)-4mcx2/b2=0
∂V/∂x=2max/b2√(4m2a2x2/b4+4mcx2/b2)
∂V/∂x=x[2ma/b22/b2*√(m2a2+mcb2)]
Использую (10) подставим
U0= -b/2m*[2ma/b22/b2*√(m2a2+mcb2)]*x= -[a/b1/mb2√(m2a2+mcb2)]*x
знак перед √ выберем из условия устойчивости движения , т.е. при t→∞, x(t) →0
x(●)=ax+bu. x(0)=0
dx/dt=ax-b[a/b1/m√(m2a2/b2+ mc)]* x
dx/dt=b/m√(m2a2/b2+mc)*x, Проинтегрируем это Ур-е.
x=x0*exp(b/m√(m2a2/b2+mc)*t)
Т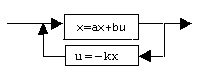 .о.U0=
-[a/b+1/m√( m2a2/b2+mc)]*x
.о.U0=
-[a/b+1/m√( m2a2/b2+mc)]*x
U=-kx
K=[a/b+1/m√( m2a2/b2+ mc)].