

1.2.2. Обозначение и параметры исследуемой аппаратуры (таблица 1.1)
Таблица 1.1
Обозначение |
Наименование |
Тип |
Параметры |
RA |
Активная нагрузка |
306.1 |
3 0…50 Вт; 220/380 В |
RR |
Реостат |
323.2 |
200 Ом; 0,8 А |
RB |
Реостат возбуждения машины постоянного тока |
308.1 |
0…2000 Ом; 0,1…0,5 А |
GA |
Трехфазный источник питания |
201.2 |
~ 400 В; 16 А |
GB |
Источник питания двигателя постоянного тока |
206.1 |
– 0…250 В / 3 А (якорь); – 200 В / 1 А (возбуждение) |
GG |
Возбудитель машины переменного тока |
209.2 |
– 0…40 В; 3,5 А |
D2 |
Машина переменного тока |
102.1 |
50 Вт; ~ 230 В; 1500 мин1 |
DD |
Преобразователь угловых перемещений |
104 |
6 выходных сигналов |
D1 |
Машина постоянного тока |
101.2 |
90 Вт; – 220 В/ 0,76 А (якорь); – 220 В (возбуждение) |
IB |
Указатель частоты вращения |
506.3 |
2000…0…2000 мин1 |
BM |
Блок мультиметров |
508.2 |
0...1000 В; 0...20 А |
FC |
Преобразователь частоты |
217 |
0...100 Гц; ~ 3220 В; 3 А |
1.3. Режимы работы, статические характеристики двигателей
постоянного тока независимого возбуждения
Аналитическое выражение электромеханических =f(I) и механических =f(M) характеристик двигателя постоянного тока с независимым возбуждением (ДПТ с НВ):
![]()

где знак ”+” соответствует режиму рекуперативного (генераторного) торможения;
знак “” режимам двигательному, противовключения и динамического торможения;
U напряжение питания двигателя;
I ток якоря двигателя;
R
сопротивление якорной цепи, состоящее
в общем случае из сопротивлений
добавочного резистора RД
и якоря
![]() ;
;
![]() – сопротивления соответственно обмотки
якоря, дополнительных полюсов и
компенсационной обмотки;
– сопротивления соответственно обмотки
якоря, дополнительных полюсов и
компенсационной обмотки;
М электромагнитный момент двигателя;
кФ соответственно конструктивный коэффициент и магнитный поток двигателя;
С коэффициент связи двигателя;
ω0 – скорость идеального холостого хода;
Δω падение скорости относительно скорости ω0 при изменении нагрузки от нуля до заданного значения.
Возможные режимы работы электродвигателя:
двигательный режим (характеристика 1-2, рис. 1.3);
режим рекуперативного (генераторного) торможения (характеристика 2-3);
режим торможения противовключением при сохранении полярности питающего напряжения и наличии активной нагрузки (характеристика 1-4);
режим динамического торможения с независимым возбуждением (характеристика 0-5).
Скорость вращения в электроприводе с ДПТ независимого возбуждения регулируют изменением питающего напряжения U, включением в якорную цепь добавочного сопротивления RД, изменением магнитного потока Ф, шунтированием обмотки якоря сопротивлением Rш. На рис. 1.4 показаны естественная и искусственные характеристики при указанных способах регулирования.
EMBED Visio.Drawing.11
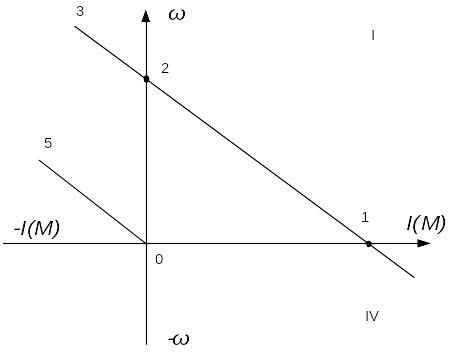
Рис. 1.3. Электромеханические и механические характеристики
электропривода с ДПТ НВ

Рис. 1.4. Естественная и искусственные электромеханические и
механические характеристики ДПТ НВ:
1 естественная (U=UН; Ф=ФН; RД=0; RШ=0);
2 искусственная (RД0);
3 искусственная (U<UН);
4 искусственная (Ф<ФН);
5 искусственная c шунтированием (RД0, RШ0)