2.2. Метод получения топологических уравнений с использованием м-матрицы.
Строится матрица с использованием дерева графа, кол-во столбцов соответствует числу ветвей дерева, а кол-во строк числу хорд. Циклом наз-ся любой замкнутый контур в графе, деревом наз-ся часть графа содержащая все вершины и не имеющая циклов. Хорда – ребро графа не вошедшие в цикл.
Процедура формирования матрицы следующая:
Каждая хорда графа поочерёдно подключается к дереву, при этом появляется цикл.
Появляется обход цикла, в направлении совпадающем с направлением хорды
В строке матрицы, соответствующей данной хорде ставится +1 в столбце той ветви, которая присутствует в возникшем цикле, если её направление соответствует направлению обхода; - 1 – если направление противоположно направлению обхода; 0- если ветвь не вошла в цикл.
Ветви дерева:
|
б |
г |
д |
е |
ж |
а |
-1 |
0 |
0 |
+1 |
-1 |
в |
+1 |
+1 |
0 |
0 |
0 |
к |
0 |
0 |
+1 |
0 |
0 |
и |
0 |
-1 |
-1 |
-1 |
0 |
Проверим, что хроматические уравнения соответствующие зк. Киргофа будут иметь вид:


Рассмотрим эти уравнения покомпанентно, чтобы проверить уравнения Киргофа:




2-ая группа уравнений имеет вид:





Остаточные уравнения соответствуют тому, что суммы токов по сечения изображённых на рисунке = 0. Понятно, что они могут быть получены эквивалентным преобразованием из стандартной записи зк. Киргофа.
3.2. Получение эквивалентной системы технических объектов.
Если представить все простейшие элементы подсистемы, как 2-полюсники, то для получения математической модели сложного технического объекта состоящего из физических разных подсистем, нужно:
Выделить в объекте однородные физические подсистемы(электрические, гидравлические)
Установить связь между подсистемами
Для получения ММ отдельных подсистем, необходимо представить все входящие в неё элементы, как не пересекающиеся 2-полюсники.
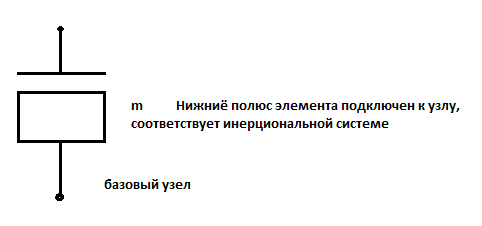
Примерами 2-полюсника для электрической являются элементы типа C,R,L, для поступательной – собственная масса(связь с окружающей средой)
После того как установлена связь между подсистемами, следует установить общую ММ системы.
Выделяют:
Элементы трения Элементы упругих связей
В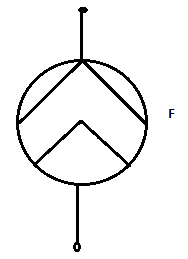 нешние
усилия воздействующие на какую-то массу
отображаются 2-полюсником и наз-ся
источником силы. Один его узел подсоединён
к узлу элемента типа масса, который
соответствует массе объекта подвергающемуся
усилию, а второй узел - к базовому элемету.
нешние
усилия воздействующие на какую-то массу
отображаются 2-полюсником и наз-ся
источником силы. Один его узел подсоединён
к узлу элемента типа масса, который
соответствует массе объекта подвергающемуся
усилию, а второй узел - к базовому элемету.
Пример:
Эквивалентная схема для активного звена автомобиля без учета расположенного на нем груза:
Для автомобиля с массой, Для прицепа с учетом груза.
расположенной на нем:
Окончательная схема выглядит следующим образом: