

Лекция 7. Линейные операторы
Линейный оператор - определение и примеры. Матрица линейного оператора. Собственные числа и собственные векторы. Линейные операторы с простым спектром
7.1. Понятие линейного оператора
Определение 1. Пусть V - линейное пространство и каждому вектору x , принадлежащему V , поставлен в соответствие вектор y ,
y V . |
Соответствие |
A : x → y |
называется |
оператором, |
||
определенным в линейном пространстве V . |
|
|||||
Принята |
также |
запись: y = A(x) . Вектор x |
называется |
|||
прообразом, а y - образом при отображении оператором A . |
||||||
Определение 2. |
Оператор A , |
определенный |
в линейном |
|||
пространстве V , называется линейным, если: |
|
|||||
1) |
x V |
y V |
A(x +y) = A(x) + A(y) ; |
|
||
2) x V λ - вещественного числа A(λx) = λA(x) .
Пример 1. V - линейное пространство всех геометрических векторов
плоскости, A |
- зеркальное |
отражение |
относительно |
оси Ox (рис. |
7.1). A - |
линейный оператор.
Убедимся, что выполняется требование 2) в определении 2.
Пусть λ - произвольное вещественное
число, |
по определению умножения на λ для |
|||||||
геометрического вектора x , вектор |
uuur |
|||||||
OB = λx |
||||||||
имеет |
то |
же направление, что и |
x , если |
|||||
λ > 0 , |
и |
|
противоположное, если |
λ < 0 , |
||||
|
uuur |
|
|
|
|
|
|
|
и |
OB |
|
= |
λ |
|
x |
. |
|
|
|
|
|
|
|
|
|
|
y
x
x
A(x)
Рис. 7.1.
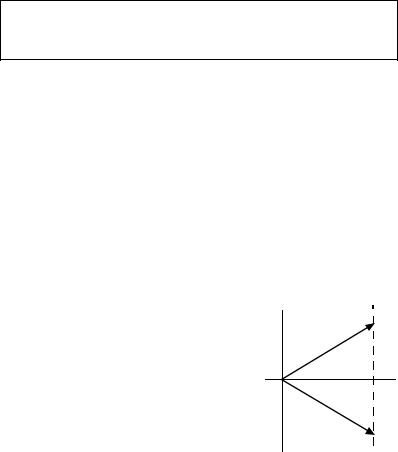
Рис. 7.2 соответствует случаю |
λ > 0 , |
|
λ |
|
>1 ( λ < 0 |
|
|
||||
рассматривается аналогично). |
|
|
|
|
|
|
|
|
|
|
|
uuur |
uuur |
|
|
uuur |
|
- |
зеркальное отражение вектора |
|||||||||||||||||||
uuur |
Пусть OK = x , |
OB = λx , |
OP |
|
||||||||||||||||||||||||||||
относительно оси Ox , |
uur |
- зеркальное отражение вектора |
uur |
|||||||||||||||||||||||||||||
OK |
OD |
OB . |
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
OB |
|
OD |
|
|
|
uuur |
|
|
|
|
uuur |
|
|
Тогда |
∆OKP |
~ ∆OBD |
и, |
значит, |
|
|
= |
. |
Но |
|
OB |
|
= |
λ |
|
OK |
, |
|||||||||||||||
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
uuur |
|
|
|
uuur |
|
|
|
|
|
|
OK |
|
OP |
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
uur |
|||||||||
поэтому |
|
OD |
= |
λ |
|
OP |
. |
Кроме |
того, |
направление |
|
вектора |
OP |
|||||||||||||||||||
совпадает |
|
с направлением вектора |
uuur |
|
|
|
|
|
|
uur |
uuur |
|||||||||||||||||||||
|
OD , |
следовательно, OD = λ OP . |
||||||||||||||||||||||||||||||
|
y |
|
|
|
|
|
|
|
B |
|
|
|
Таким образом, имеем |
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
uuur |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
K |
|
|
|
|
|
|
|
|
|
OP = A(x) |
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
uuur |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
OD |
= A(λx) |
A(λx) |
= λA(x) . |
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
uuur |
|
|
uuur |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
OD |
= λ OP |
|
|
|
|
|
|
|
|
|
|
|
||||
|
O |
|
|
|
|
|
|
|
C x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
Также, исходя из геометрических |
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
соображений, |
|
|
можно |
доказать, |
что |
|||||||||||||
|
|
|
|
|
|
P |
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
A(x +y) = A(x) |
+ A(y) , |
|
следовательно, |
||||||||||||||||
|
|
|
|
|
|
|
|
D |
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
оператор |
|
A |
|
зеркального |
отражения |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
Рис. 7.2. |
|
|
|
|
|
|
|
относительно |
оси |
Ox |
является |
линейным |
||||||||||||||||
оператором. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
Упражнения. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
1. |
V ={Pn (x)}- линейное пространство всех многочленов степени |
||||||||||||||||||||||||||||
≤ n , |
A - |
|
оператор дифференцирования, |
A : Pn (x) → Pn′(x) . |
Доказать, |
|||||||||||||||||||||||||||
что A - линейный оператор. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
2. |
V = C[a,b]- линейное пространство всех непрерывных на отрезке |
||||||||||||||||||||||||||||
[a,b] функций. Для |
любой |
f (x) V оператор |
A |
определен |
||||||||||||||||||||||||||||
следующим равенством: |
|
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A( f (x)) = ∫f (t)dt , x [a,b]. |
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Доказать, что A - линейный оператор. |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
Определение 3. |
Пусть |
V - линейное пространство, e1,e2 ,...,en - |
|||||||||||||||||||||||||||
базис |
в |
V , |
A - линейный оператор |
|
в |
V . Матрицей |
линейного |
|||||||||||||||||||||||||
оператора A в базисе e1,e2 ,...,en называется матрица |
Q = |
aij |
, |
||
i, j =1,.., n , такая, что |
|
|
|
|
|
A(e1) = a11e1 |
+a21e2 |
+... + an1en , |
|
|
|
A(e2 ) = a12e1 |
+ a22e2 |
+... + an2en , |
|
|
|
…………………………………….. |
(7.1) |
||||
A(en ) = a1ne1 +a2ne2 +... + annen .
Замечание 1 . Столбцы матрицы Q являются координатами в разложении векторов A(e1), A(e2 ),..., A(en ) по базису e1,e2 ,...,en .
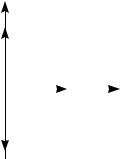
Пример 2. Найти матрицу линейного оператора зеркального отражения относительно оси Ox в базисе i, j .
Решение. |
По |
определению оператора |
|
A A(i) = i, A(j) = −j (рис. 7.3). |
|
||
Используя |
разложение векторов |
A(i) и |
|
A(j) по базису i, j , |
находим: A(i) = i ={1,0}, |
||
A(j) = −j ={0, −1}. |
Полученные |
строки |
|
координат располагаем по столбцам: |
|
||
y |
|
|
|
j |
|
|
i=A(i) |
|
O |
x |
|
-j=A(j)
1 |
0 |
Рис. 7.3. |
Q = |
. |
|
0 |
−1 |
|
Упражнение. V3 - линейное пространство всех геометрических |
||
векторов, i, j,k - декартов базис, Oxyz |
- декартова система координат, |
|
A - оператор проектирования на ось Ox . Доказать, что A - линейный оператор, и найти его матрицу в базисе i, j,k .
Замечание 2 . Пусть V - линейное пространство, A - линейный оператор в V , e1,e2 ,...,en (I) - базис в V . Матрица оператора в базисе
(I) определена однозначно.
Для того, чтобы в этом убедиться, разложим векторы A(e1), A(e2 ),..., A(en ) по базису (I). Столбцы матрицы Q представляют
собой координаты этих векторов, которые согласно теореме 3 лекции 5 определяются единственным образом, следовательно, матрица Q
оператора A в (I) определена однозначно.
|
Теорема 1. Пусть |
V - линейное пространство, e1,e2 ,...,en |
|
|
|
(I) |
- |
||||||||||||||||||||
базис в V , A - линейный оператор |
в |
V , |
Q = |
|
|
|
aij |
|
, i, j, =1,..., n |
- |
|||||||||||||||||
|
|
|
|||||||||||||||||||||||||
матрица |
линейного |
|
оператора |
A |
в |
базисе |
|
(I), |
|
|
x V , |
||||||||||||||||
x = x1e1 +... + xnen , y = A(x) , |
y = y1e1 +... + ynen . Тогда |
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
y |
|
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
1 |
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
... |
|
= Q ... |
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
y |
n |
|
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Доказательство. Имеем |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
y = A(x) = A(x e +... + x e |
n |
) |
|
= |
|
x A(e ) +... + x A(e |
n |
) = |
|
|
||||||||||||||||
|
|
|
|
|
1 1 |
|
n |
|
А − линейный 1 |
1 |
|
|
|
|
|
n |
|
|
|
|
|
|
|||||
= |
n |
|
) |
= |
n |
|
n |
|
|
|
|
|
= |
|
|
|
|
n |
|
n |
|
|
|
|
|
|
|
x A(e |
x |
|
a e |
|
|
|
|
|
|
|
|
|
|
x a e |
|
|
= |
|
|||||||||
|
∑ i |
i |
|
(7.1) ∑ i |
∑ ki |
|
k |
|
вносим xi под |
∑ |
∑ i |
ki |
|
k |
|
|
|||||||||||
|
i=1 |
|
|
|
i=1 |
k =1 |
|
|
|
знак внутренней суммы i=1 |
k =1 |
|
|
|
|
|
|
|
|||||||||
|
|
= |
|
|
n |
n |
x a e |
|
|
|
|
|
= |
n |
|
n |
|
|
|
|
|
. |
|
||||
|
|
|
|
|
|
k |
|
|
|
|
|
|
|
|
|
|
x a |
|
e |
k |
|
||||||
|
меняем порядок |
∑ ∑ i ki |
|
|
выносим ел за |
∑ |
∑ i ki |
|
|
|
|
|
|||||||||||||||
|
суммирования |
k =1 i=1 |
|
|
|
знак внутренней. суммы k =1 i=1 |
|
|
|
|
|
|
|
||||||||||||||
n
По условию y = y1e1 +... + ynen = ∑yk ek .
k =1
Используя теорему о единственности разложения вектора по базису (теорема 3 из лекции 5), получим
|
n |
|
|
|
|
|
k, k =1...n, yk = ∑xi aki =x1ak1 + x2ak 2 +... + xnakn . |
(7.2) |
|||||
|
i=1 |
|
|
|
|
|
Заметим, что в последнем |
равенстве числа ak1, ak 2 ,..., akn - |
|||||
элементы k-й строки матрицы Q . |
|
|
|
|||
Учитывая правило умножения матриц, равенство (7.2) запишем в |
||||||
виде |
|
|
|
|
|
|
|
y |
|
x |
|
|
|
|
|
1 |
|
1 |
|
|
... |
|
= Q ... |
. |
|
||
y |
n |
|
x |
|
|
|
|
|
|
n |
|
|
|
Теорема доказана.
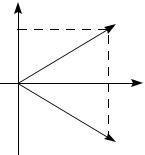
Пример |
3. Для |
линейного |
оператора зеркального |
отражения |
|||||||||||||||
относительно оси Ox найти, как |
|
преобразуются |
координаты |
||||||||||||||||
произвольного вектора. |
|
|
|
|
|
|
|
y |
|
|
|
|
|
||||||
Решение. Матрица оператора была |
|
x={x1, x2} |
|
||||||||||||||||
найдена в примере 2: |
|
|
|
|
|
|
|
|
x2 |
|
|||||||||
|
|
|
|
|
1 |
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Q = |
|
. |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
0 |
−1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
В силу теоремы 1, если |
x = x1 |
- |
O |
|
|
x |
|
x |
|||||||||||
|
|
|
|
|
|
|
|
|
|
x2 |
|
|
|
|
|
|
1 |
|
|
прообраз, а |
y = A(x) |
- |
образ, |
y = y1 , |
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
y2 |
|
|
A(x) ={x1,− x2} |
|
|
||||
y1 |
|
1 |
0 x1 |
|
x1 |
|
|
|
|
|
|
|
|||||||
то y |
2 |
|
= |
0 |
−1 x |
|
= |
−x |
, |
то есть |
|
|
Рис. 7.4. |
|
|
|
|
||
|
|
|
|
2 |
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
первая координата образа остается без изменения, а вторая меняет лишь |
|||||||||||||||||||
знак (рис. 7.4). |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Пример |
4. |
|
V ={P2 (x)}- |
линейное |
пространство |
всех |
|||||||||||||
многочленов степени ≤ 2 , |
A - линейный оператор дифференцирования. |
||||||||||||||||||
Найти |
его |
матрицу |
|
в |
базисе |
1, x, x2 |
|
и, используя теорему 1, |
|||||||||||
продифференцировать многочлен |
P |
= −3x2 +4x −7 . |
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
Решение. Находим образы векторов базиса |
A(ei ) |
и |
разлагаем |
||||||||||||||||
полученные векторы по базису 1, x, x2 : |
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
A(e ) = A(1) = (1)′ = 0 = (0,0,0) , |
|
|
|
|
||||||||||
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A(e2 ) = A(x) = (x)′ =1 = (1,0,0) , |
|
|
|
|
||||||||||
|
|
|
|
|
A(e3 ) = A(x2 ) = (x2 )′ = 2x = (0, 2,0) . |
|
|
|
|
||||||||||
Матрица оператора A в базисе 1, x, x2 |
имеет вид |
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
0 |
1 |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
0 |
2 |
|
, |
|
|
|
|
|
|
|
|
|
|
|
|
|
Q = |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
0 |
0 |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
−7 |
|
|
|
|
|
|
|
|
β |
|
|
||
а вектор P |
= −3x2 |
+4x −7 = |
|
4 |
. |
Обозначим |
A(P ) = |
|
β1 |
|
. По |
||||||||
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
2 |
|
|
|
|
|
|
|
|
|
−3 |
|
|
|
|
|
|
|
|
|
β |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
теореме 1 имеем |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
β |
|
0 |
1 |
0 |
−7 |
|
4 |
|
|
|
|
|
|||||
|
|
1 |
|
|
0 |
0 |
2 |
|
4 |
|
|
−6 |
|
, |
|
|
|
|
|
|
|
β2 |
= |
|
|
= |
|
|
|
|
|
||||||||
|
|
β |
|
|
0 |
0 |
0 |
|
−3 |
|
|
0 |
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
или в виде разложения по базису 1, x, x2 : A(P2 ) = 4 −6x .
Упражнение. V2 - линейное пространство всех геометрических векторов плоскости, i,j - декартов базис, Oxy - декартова система
координат, A - оператор поворота плоскости вокруг начала координат на угол ϕ = π3 против часовой стрелки. Доказать, что A - линейный
оператор, найти матрицу Q оператора A в базисе i,j и координаты образа вектора x ={1, 2}.
7.2. Собственные векторы и собственные значения линейного оператора
Определение 4. Квадратные матрицы B и C называются подобными, если существует невырожденная матрица Q , такая, что
|
|
|
|
|
|
|
|
C = Q−1BQ . |
|
|
|
Теорема 2. Пусть V - линейное пространство, |
e1,e2 ,...,en |
(I) и |
|||||||||
e1′,e′2 ,...,e′n (II) - два базиса в V , T - матрица перехода от (I) к (II), |
A |
||||||||||
- линейный оператор в V , B - матрица оператора A в (I), |
C |
- |
|||||||||
матрица оператора A в (II). Тогда |
|
|
|
||||||||
|
|
|
|
|
|
|
|
C =T −1BT . |
|
|
|
Это утверждение примем без доказательства. |
|
|
|
||||||||
Пусть A = |
|
|
|
aij |
|
|
|
, i, j, =1...n . Матрица A −λE , где |
E - единичная |
||
|
|
|
|
||||||||
матрица порядка n , а λ - произвольное вещественное число,
называется характеристической матрицей для A . Она имеет вид
|
a11 −λ |
a12 |
... |
|
a1n |
|
|
|||
|
|
a |
a |
|
−λ |
... |
|
a |
|
|
A −λE = |
|
21 |
22 |
|
|
|
2n |
|
. |
|
.... |
... |
... |
|
... |
|
|||||
|
|
|
||||||||
|
|
a |
a |
n2 |
... |
a |
−λ |
|
||
|
|
n1 |
|
|
|
nn |
|
|
||
Определитель |
|
A −λE |
|
- некоторый |
|
многочлен |
|
|
порядка |
n |
||||||||||||||||||||||||||||||
|
|
|||||||||||||||||||||||||||||||||||||||
относительно λ. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Определение |
5. |
|
|
|
Многочлен |
|
|
A −λE |
|
|
|
|
|
|
|
|
|
|
называется |
|||||||||||||||||||||
|
|
|
|
|||||||||||||||||||||||||||||||||||||
характеристическим |
|
|
|
многочленом |
|
матрицы A , а |
его корни |
- |
||||||||||||||||||||||||||||||||
характеристическими корнями матрицы A . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
Теорема 3. Подобные матрицы имеют одинаковый набор |
||||||||||||||||||||||||||||||||||||||||
характеристических корней. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
Доказательство. Пусть C = Q−1BQ , Q - невырожденная матрица. |
||||||||||||||||||||||||||||||||||||||||
Имеем |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
C −λE |
|
= |
|
Q−1BQ −λE |
|
= |
|
Q−1BQ −Q−1(λE)Q |
|
|
= |
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||
|
|
|
||||||||||||||||||||||||||||||||||||||
= |
|
|
Q−1(B −λE)Q |
|
|
= |
|
|
|
Q−1 |
|
|
|
B −λE |
|
|
|
Q |
|
= |
|
B −λE |
|
. |
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||
свойства |
|
|
|
|
|
|
|
|
|
|
|
|
теорема об |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
умножения |
|
|
|
|
|
|
|
определителе |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
матриц |
|
|
|
|
|
|
|
|
|
|
|
|
произведения |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
матриц |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Характеристические многочлены матриц В и С совпадают, следовательно, совпадают и характеристические корни.
Теорема доказана.
Следствие. Матрицы, задающие линейный оператор в различных базисах, имеют один набор характеристических корней. (Теорема 2 +
теорема 3.)
Определение 6. Характеристические корни матрицы линейного оператора (в любом базисе) называются характеристическими корнями линейного оператора.
Определение 7. Весь набор характеристических корней называется спектром оператора.
Определение 8. Пусть V - линейное пространство, A - линейный оператор в V . Вектор x ≠ θ называется собственным вектором оператора A , если найдется действительное число λ, такое, что
A(x) = λx .
Число λ называется собственным значением, соответствующим данному собственному вектору x .
Справедливо следующее утверждение, которое приведем без доказательства.
Теорема 4. Действительные характеристические корни линейного оператора, если они существуют, и только они, служат собственными значениями линейного оператора.
Пример 5. Найти собственные векторы и собственные значения линейного оператора зеркального отражения относительно оси Ox .
Матрица оператора была найдена в примере 2: |
1 |
0 |
||||||||
Q = |
. |
|||||||||
Составляем характеристическое уравнение: |
0 |
−1 |
||||||||
|
|
|||||||||
|
Q −λE |
|
= |
|
1−λ |
0 |
|
= 0 , |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|||||||
|
|
|
|
|
0 |
−1−λ |
|
|
|
|
|
|
|
|
|
|
|
|
|||
откуда (1−λ)(−1−λ) = 0 и λ1 =1 , λ2 = −1 . |
|
|
|
|
||||||
Числа λ1 =1 , λ2 = −1 - |
|
характеристические корни |
линейного |
|||||||
оператора (в соответствии с определением 6), они действительны и, согласно теореме 4, являются собственными значениями. Найдем соответствующие им собственные векторы.
По определению собственного вектора x A(x) = λx , но A(x) = Qx , следовательно, ищем векторы, удовлетворяющие уравнению Qx = λx , или Qx = λEx , или
|
(Q −λE)x = θ . |
|
(7.3) |
|||
При λ1 =1 имеем Q −λ1E = |
0 |
0 |
. Подставим ее в (7.3): |
|||
0 |
−2 |
|||||
0 |
0 x1 |
|
0 |
|
||
0 |
−2 |
x |
= |
0 |
|
, |
|
|
2 |
|
|
|
|
что равносильно системе уравнений
0 |
x |
+0 x |
= 0, |
(7.4) |
|
|
0 |
1 |
2 |
= 0, |
|
|
x |
−2 x |
|
||
|
1 |
2 |
|
|
|
откуда x2 = 0 , и решением системы (7.4) являются все векторы вида
|
X (1) = c1 |
, |
|
|
|
||
|
0 |
|
|
|
|
||
c1 - произвольное вещественное число, отличное от нуля. |
|||||||
При λ2 = −1 получаем Q −λ2 E = |
|
2 |
0 |
, подставляем в (7.3): |
|||
|
0 |
0 |
|
||||
|
|
|
|
|
|
||
2 |
0 x1 |
|
|
0 |
|
|
|
0 |
0 x |
|
= |
0 |
, |
|
|
|
2 |
|
|
|
|
|
|
получаем систему уравнений |
|
|
|
|
|
|
|
2 x1 +0 x2 = 0, |
|
|
|||||
0 |
x +0 x |
= 0, |
|
|
|||
|
1 |
|
2 |
|
|
|
|
откуда X (2) = |
0 |
|
, |
с - произвольное вещественное число, отличное |
|
|
|
с |
|
|
2 |
|
|
2 |
|
|
|
от нуля.
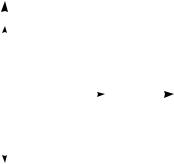
Геометрически это означает, что любой ненулевой вектор,
приложенный |
к началу координат |
с концом на |
оси Ox , является |
|||||
собственным, |
отвечающим |
y |
|
|
|
|
||
собственному |
значению |
|
|
|
|
|||
|
|
|
|
|||||
λ1 =1 (действие на |
него |
|
|
|
|
|
||
оператора |
A |
сводится к |
|
A(y) |
|
|
|
|
умножению его на λ1 =1 , а |
|
|
|
|
|
|||
любой ненулевой вектор с |
|
x =A(x) - собств., λ = 1 |
||||||
концом на оси |
Oy является |
|
||||||
|
|
|
|
|
||||
O |
|
|
x |
|||||
собственным, |
отвечающим |
|
|
|||||
|
|
|
|
|
||||
собственному |
значению |
|
y - собств., |
λ = –1 |
||||
λ2 = −1 |
(то есть действие |
|
||||||
|
|
|
|
|
||||
оператора |
A |
на |
этот |
|
|
|
|
|
|
|
|
|
|
||||
вектор |
заключается |
в |
|
Рис 7.5. |
||||
умножении его на λ2 = −1 |
|
|||||||
|
|
|
|
|
||||
(рис. 7.5)).
Упражнение. V - линейное пространство всех геометрических векторов, A - линейный оператор проектирования на ось Ox . Найти все его собственные числа и собственные векторы.
7.3. Приведение матрицы линейного оператора к диагональному виду путем перехода к новому базису
Линейный оператор A задается в базисе e1,e2 ,...,en (I)
диагональной матрицей тогда и только тогда, когда все векторы базиса
(I) - собственные.
Действительно, пусть e1,e2 ,...,en (I) - собственные векторы, отвечающие собственным значениям λ1, λ2 ,..., λn соответственно, то
есть
A(e1) = λ1e1 , A(e2 ) = λ2e2 ,
………………. (7.5)
A(en ) = λnen .
Из равенств (7.5) следует справедливость разложений по базису (I):
A(e1) = λ1 e1 +0 e2 +... +0 en , A(e2 ) = 0 e1 +λ2 e2 +... +0 en ,
…………………………………….
A(en ) = 0 e1 +0 e2 +... +λn en ,
и по определению матрицы оператора (определение 3) имеем
λ1 |
0 ... |
0 |
|
|
|
|
0 |
λ2 ... |
0 |
|
(7.6) |
Q = |
0 |
0 ... |
0 |
, |
|
|
|
|
|||
|
0 |
0 0 |
|
|
|
|
λn |
|
|||
то есть матрица Q оператора |
A в (I) |
- диагональная (по диагонали |
|||
стоят собственные значения). |
|
|
|
|
|
Обратно. Пусть Q - матрица оператора A |
в базисе (I) имеет |
||||
диагональный вид (7.6), следовательно, |
A(e1) = λ1e1 ,…, A(en ) = λnen и, |
||||
таким образом, векторы ei , |
i =1,..., n - |
собственные с собственными |
|||
значениями λi , i =1,..., n . |
|
|
|
|
|
Вопрос о том, можно ли линейный оператор задать в некотором базисе диагональной матрицей, равносилен вопросу о том, существует ли для данного оператора базис, состоящий из собственных векторов.
Теорема 5. Пусть V - |
линейное пространство, A - линейный |
|||
оператор в V , b1,b2 ,...,bk |
- собственные векторы оператора A , |
|||
отвечающие |
собственным |
значениям |
λ1, λ2 ,..., λk . |
Если |
i j, i ≠ j λi ≠ λ j , то b1,b2 ,...,bk - линейно независимы.
Доказательство. Доказательство проведем индукцией по числу
векторов k . |
|
При k =1 имеем один вектор b1 ≠ θ |
(по определению |
собственный вектор отличен от нулевого), вектор b1 составляет
линейно независимую систему.
Пусть утверждение теоремы справедливо для k −1 : всякая система
k −1 собственных |
векторов, |
отвечающих |
различным |
|
собственным |
||||||||||||||||||
значениям, является линейно независимой. |
|
|
|
|
|
|
|
|
|
|
|||||||||||||
Пусть имеется |
система |
k |
собственных векторов |
b1,b2 ,...,bk , |
|||||||||||||||||||
относящихся |
к |
|
различным |
собственным |
|
значениям |
λ1, λ2 ,..., λk |
||||||||||||||||
( i j, i ≠ j λi ≠ λ j ). |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Предположим, система b1,b2 ,...,bk |
|
- |
|
линейно зависима, |
то есть |
||||||||||||||||||
найдутся числа α1, α2 ,..., αk , |
не все |
|
равные |
нулю, |
такие, |
что |
|||||||||||||||||
выполняется равенство |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
α1b1 +α2b2 +... +αk bk = θ. |
|
|
|
|
|
(7.7) |
|||||||||||
Не ограничивая |
общности |
рассуждений, можем |
|
считать, |
что |
||||||||||||||||||
α1 ≠ 0 (иначе перенумеруем векторы). |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
Применим к обеим частям равенства (7.7) оператор A : |
|
|
|
||||||||||||||||||||
A(α b +α |
2 |
b |
2 |
+... +α |
k |
b |
k |
) |
= |
|
α A(b ) +... +α |
k |
A(b |
k |
) = |
|
|||||||
1 1 |
|
|
|
|
|
A - линейный |
|
1 |
|
1 |
|
|
|
|
|||||||||
b |
|
|
|
|
= |
|
α λ b +... +α |
k |
λ |
k |
b |
k |
= A(θ) = θ. |
|
|
|
|||||||
- cобственные, |
1 |
1 1 |
|
|
|
|
|
|
|
|
|
|
|||||||||||
i |
|
|
i=1,...,n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Из последнего равенства получаем |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
α1λ1b1 +... +αk λk bk |
= θ . |
|
|
|
|
|
(7.8) |
||||||||||
Обе части равенства (7.7), умноженные на λk , вычтем почленно из |
|||||||||||||||||||||||
обеих частей (7.8), получим |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
α1(λ1 −λk )b1 +... +αk (λk −1 −λk )bk −1 = θ. |
|
|
|
|
(7.9) |
||||||||||||||||
Равенство (7.9) означает, что векторы |
|
b1,b2 ,...,bk −1 - |
|
линейно |
|||||||||||||||||||
зависимы (их линейная комбинация с коэффициентами, |
не равными |
||||||||||||||||||||||
одновременно нулю, например, коэффициент при b1 отличен от нуля, равна θ ), но это противоречит предположению индукции: векторы b1,b2 ,...,bk −1 - собственные, относящиеся к различным собственным значениям. Следовательно, b1,b2 ,...,bk - линейно независимы, и
утверждение теоремы справедливо при любом k . Теорема доказана.
Определение 9. Линейный оператор A называется линейным оператором с простым спектром, если все его характеристические корни действительны и различны.
Теорема 6. Всякий линейный оператор с простым спектром
может быть задан диагональной матрицей. |
|
|
|
|||||
Доказательство. Пусть V - |
линейное пространство, |
dim V = n , |
||||||
A - |
линейный оператор в V , |
A имеет простой спектр. |
Тогда |
|||||
характеристических корней n . |
Пусть это числа λ1, λ2 ,..., λn , |
в силу |
||||||
теоремы 4 λ1, λ2 ,..., λn |
- собственные значения оператора A . |
|
|
|||||
Пусть e1,e2 ,...,en |
- соответствующие этим собственным значениям |
|||||||
собственные векторы, |
тогда согласно теореме 5 e1,e2 ,...,en |
- линейно |
||||||
независимы, и так как dim V = n , e1,e2 ,...,en |
- базис. В этом базисе, как |
|||||||
было отмечено выше, матрица оператора имеет вид |
|
|
||||||
|
|
λ1 |
|
0 ... |
0 |
|
|
|
|
|
0 |
|
λ2 ... |
0 |
|
|
|
|
|
Q = |
|
|
|
|
|
|
|
|
... ... ... ... |
|
|
|
|||
|
|
|
|
0 ... |
λn |
|
|
|
|
|
0 |
|
|
|
|
||
и является диагональной матрицей. |
|
|
|
|
||||
Теорема доказана. |
|
|
|
|
|
|
|
|
Пример 6. Линейный |
оператор |
A |
задан своей |
матрицей |
||||
1 |
4 |
|
|
|
|
|
|
|
B = |
в некотором базисе. Выяснить, существует ли для данного |
|||||||
2 |
3 |
|
|
|
|
|
|
|
оператора базис, в котором его матрица имеет диагональный вид. В случае положительного ответа найти этот базис и соответствующую ему матрицу Q .
Решение. Составляем и решаем характеристическое уравнение:
B −λE |
|
= |
|
1−λ 4 |
|
= 3 −4λ+λ2 −8 = λ2 −4λ−5 , |
|
|
|
||||
|
||||||
|
|
|
|
2 3 −λ |
|
|
|
|
|
|
|
λ2 −4λ−5 = 0 ,
откуда λ1 = 5 , λ2 = −1 - характеристические корни оператора A . Они
вещественны и различны, следовательно, согласно теореме 6 для оператора A существует базис, состоящий из собственных векторов, и в этом базисе матрица оператора имеет вид
|
|
|
|
|
|
|
|
5 |
|
|
0 |
|
|
|
|
||
|
|
|
|
|
|
|
|
Q = |
|
|
|
. |
|
|
|
||
|
|
|
|
|
|
|
|
0 |
|
−1 |
|
|
|
|
|||
|
|
Находим собственные векторы. |
|
|
|
|
|
|
|
|
|||||||
|
|
При λ1 = 5 имеем |
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
−4 |
4 x1 |
= |
0 |
, |
|
||||||
|
|
|
|
|
|
|
2 |
−2 |
x |
|
0 |
|
|
||||
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
||
или 2x |
−2x |
= 0 x |
= x |
X (1) = |
c1 |
. Все ненулевые векторы вида |
|||||||||||
|
|
1 |
|
2 |
1 |
2 |
|
|
|
c |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
||
c1 |
|
являются собственными с собственным значением λ = 5 . |
|||||||||||||||
c |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
При λ2 = −1 имеем |
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
2 |
4 |
x1 |
|
|
0 |
|
|
|
||
|
|
|
|
|
|
|
2 |
4 |
x |
|
|
= |
0 |
, |
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
||
или 2x |
+ 4x |
= 0 x |
= −2x |
X (2) |
|
= |
−2c2 |
. |
Все ненулевые векторы |
||||||||
|
|
1 |
|
2 |
1 |
|
2 |
|
|
|
|
|
c |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
−2c |
|
- собственные с собственным значением λ2 = −1 . |
|||||||||||||
вида |
c 2 |
|
|||||||||||||||
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Полагаем c1 = c2 =1 , имеем e1 = |
1 |
|
|
|
−2 |
||||||||||
|
|
1 , e2 |
= |
1 . |
|||||||||||||
В базисе e1,e2 матрица A оператора имеет вид Q .