


Лекция 6. Связь между базисами линейного пространства. Линейные подпространства
Матрица перехода от базиса к базису. Связь координат одного и того же вектора в двух базисах. Линейные подпространства. Примеры
6.1. Связь между базисами линейного пространства
Пусть V - линейное пространство, e1,e2 ,...,en (I) и e1′,e′2 ,...,e′n (II) -
два базиса в V .
Так как (I) - базис, любой вектор из V , в частности любой вектор системы (II), можно представить в виде линейной комбинации векторов
системы (I), |
то есть найдутся такие числа τij , i, j =1,..., n , что |
|||||||||||||||||
|
e1′ = τ11e1 +τ21e2 |
+... +τn1en |
|
|
|
|
||||||||||||
|
e′2 = τ12e1 +τ22e2 |
+... +τn2en |
|
|
|
|
||||||||||||
|
………………………………. |
(6.1) |
||||||||||||||||
|
e′n = τ1,ne1 +τ2,ne2 +... +τnnen |
|
|
|
|
|||||||||||||
Определение 1. Матрица T = |
|
|
|
τij |
|
|
|
, i, j =1,..., n |
|
|
|
называется |
||||||
|
|
|
|
|||||||||||||||
матрицей перехода от базиса (I) к базису (II). |
|
|
|
|
||||||||||||||
Замечание 1 . Столбцы матрицы перехода T = |
|
|
|
τij |
|
|
|
, i, j =1,..., n , |
||||||||||
|
|
|
|
|||||||||||||||
являются |
координатами в разложении векторов e1′,e′2 ,...,e′n по |
|||||||||||||||||
базису (I).
Справедливость этого замечания непосредственно следует из равенств (6.1).
Замечание 2 . Матрица перехода от базиса к базису является невырожденной матрицей.
Доказательство этого факта опустим. Справедливо следующее утверждение.
Теорема 1. Пусть V - линейное пространство, e1,e2 ,...,en (I) и e1′,e′2 ,...,e′n (II) - два базиса в V , T - матрица перехода от (I) к (II), x V , x = α1e1 +α2e2 +... +αnen и x = β1e1′ +β2e′2 +... +βne′n , тогда
|
|
|
|
|
|
|
|
|
|
|
|
|
|
β |
|
|
|
|
|
|
α |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
β2 |
=T |
−1 |
|
α2 |
. |
|
|
|
|
|
|
|
|
(6.2) |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
... |
|
|
... |
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
αn |
|
|
|
|
|
|
|
|
|
|
|
|
|
Доказательство. |
|
|
|
βn |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
Подставим |
|
в |
разложение x по базису (II) |
||||||||||||||||||||||||||||||
выражения ei′, |
i =1, 2,..., n |
|
из (6.1), получим |
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
x = β e′ |
+β |
|
e′ +... +β |
|
e′ |
|
= |
|
n |
|
|
|
|
n |
|
β |
|
|
n |
|
τ |
|
|
|
= |
||||||||||
|
|
|
|
|
β e′= |
|
|
|
∑ |
|
e |
|
|||||||||||||||||||||||
|
1 1 |
|
|
2 |
|
2 |
|
|
|
|
n |
n |
|
∑ i i |
1 ∑ |
|
|
i |
|
|
ki |
k |
вносим βi |
под знак |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i=1 |
|
|
|
|
i=1 |
|
|
|
k =1 |
|
|
|
внутренней суммы |
||||||
= |
|
n |
|
n |
|
|
β τ |
|
e |
|
|
|
|
|
|
= |
|
|
|
|
n |
|
|
n |
|
β τ |
|
|
e |
|
|
= |
|
||
|
|
|
|
|
|
ki |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ki |
|
|
|
|||||||||
|
∑ |
∑ i |
k |
|
меняем порядок∑ |
∑ i |
k |
|
выносим e |
||||||||||||||||||||||||||
|
i=1 |
k =1 |
|
|
|
|
|
суммирования |
k =1 |
i=1 |
|
|
|
|
|
|
за знак |
k |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
внутренней суммы |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= ∑ |
∑βiτki ek . |
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k =1 |
i=1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Последнюю сумму запишем развернуто: |
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
n |
|
n |
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
n |
|
|
∑ |
∑βi τki ek |
= |
|
∑βiτ1i e1 + |
|
∑βi τ2i e2 |
+... + |
|
∑βiτni en = |
||||||||||||||||||||||||||
k =1 |
i=1 |
|
|
|
|
|
|
i=1 |
|
|
|
|
|
|
|
i=1 |
|
|
|
|
|
|
|
|
|
|
i=1 |
|
|||||||
= (β1τ11 +β2τ12 +... +βnτ1n )e1 +(β1τ21 +β2τ22 +... +βnτ2n )e2 +... + |
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
+(β1τn1 +β2τn2 +... +βnτnn )en . |
|
|
|
||||||||||||||||||||||
По |
|
условию |
x = α1e1 +α2e2 +... +αnen , |
|
|
используя теорему о |
|||||||||||||||||||||||||||||
единственности разложения вектора по базису (теорема 3 в лекции 5), получим
α1 =β1τ11 +β2τ12 +... +βnτ1n , α2 =β1τ21 +β2τ22 +... +βnτ2n ,
……………………………………
αn = β1τn1 +β2τn2 +... +βnτnn ,
что в матричном виде выглядит как равенство
|
|
|
|
|
α |
|
β |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
1 |
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
α2 =T β2 . |
|
|
|
|
|
|
|||||
|
|
|
|
|
... |
|
... |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Отсюда следует |
|
|
|
αn |
βn |
|
|
|
|
|
|
|
||||
|
β |
|
|
|
α |
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
1 |
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
β2 |
=T |
−1 |
α2 . |
|
|
|
|
|
||||
|
|
|
... |
|
|
|
... |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Теорема доказана. |
|
|
βn |
|
αn |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Пример 1. |
V2 |
- |
линейное пространство всех геометрических |
|||||||||||||
векторов плоскости, |
e1,e2 (I) - произвольный декартов базис, e1′,e′2 (II) - |
|||||||||||||||
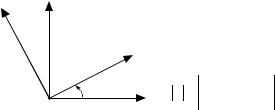
декартов базис, полученный поворотом векторов e1 и e2 на угол ϕ |
||||||||||||||||
против хода часовой стрелки. Найти матрицу |
перехода от (I) к (II) и |
|||||||||||||||
связь координат одного и того же вектора в (I) и (II). |
|
|
||||||||||||||
Имеем e′ ={cos ϕ,sin ϕ} , |
e′ |
={−sin ϕ,cos ϕ} |
( рис. 6.1). Тогда |
|||||||||||||
1 |
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
e |
|
|
|
|
|
|
|
|
|
|
cos ϕ |
−sin ϕ |
||||
2 |
|
|
|
|
|
|
|
|
T = |
|
|
|
. |
|||
e2' |
e1' |
|
|
|
|
|
|
|
|
|
sin ϕ |
|
cos ϕ |
|||
|
|
|
|
T - матрица перехода от (I) к (II). |
||||||||||||
|
|
|
|
|
|
|
Найдем T −1 . |
|
|
|
|
|||||
ϕ |
|
|
|
|
|
T = cos ϕ |
−sin ϕ |
= cos2 ϕ+sin2 ϕ =1 и |
||||||||
Рис. 6.1. |
|
|
e1 |
|
|
|
|
sin ϕ |
|
cos ϕ |
|
|
sin ϕ |
|||
|
|
|
|
|
|
|
|
T |
−1 |
|
|
cos ϕ |
|
|||
|
|
|
|
|
|
|
|
|
|
= |
|
|
|
. |
||
|
|
|
|
|
|
|
|
|
|
|
|
−sin ϕ |
cos ϕ |
|||
Формула (6.2) в этом случае имеет вид |
|
|
|
|
|
|
||||||||||
|
|
β |
|
|
|
cos ϕ |
sin ϕ |
α |
|
, |
|
|
||||
|
|
1 |
= |
|
−sin ϕ |
|
|
|
1 |
|
|
|
||||
|
β2 |
|
cos ϕ |
α2 |
|
|
|
|||||||||
где α1,α2 - координаты произвольного вектора |
x V в базисе (I), а |
|||||||||||||||
β1,β2 координаты этого же вектора в базисе (II). |
|
|
|
|||||||||||||
Пример 2. V - произвольное линейное пространство, dim V = 2 . |
||||||||||||||||
Векторы e1′ = (1,1) , e′2 = (1, 2) |
и x = (6,9) |
заданы своими координатами в |
||||||||||||||
некотором базисе e1,e2 . Доказать, что система e1′,e′2 - базис в V , и найти координаты вектора x в базисе e1′,e′2 .
Сначала докажем, что система e1′,e′2 - базис. Рассмотрим линейную комбинацию векторов e1′ и e′2 , равную нулевому вектору θ :
λ1e1′ +λ2e′2 = θ.
Покоординатно последнее равенство запишется в виде системы двух уравнений:
λ1+ λ2 = 0, |
(6.3) |
||||||
λ + 2λ |
2 |
= 0. |
|||||
1 |
|
|
|
|
|
||
Определитель системы (6.3) |
∆ = |
|
1 |
1 |
|
= 2 −1 =1 ≠ 0 , следовательно, |
|
|
|
||||||
|
|
|
|
1 |
2 |
|
|
система (6.3) имеет единственное решение λ1 = λ2 = 0 .
Итак, допустив, что линейная комбинация векторов e1′ и e′2 , равна θ , мы с необходимостью получили, что коэффициенты этой линейной
комбинации равны нулю. Это означает, что система векторов |
e1′,e′2 |
|||||||||||||||||
линейно независима, |
|
а |
так |
как dim V = 2 , |
векторы e1′,e′2 являются |
|||||||||||||
базисом в V . Обозначим этот базис (II). |
|
|
|
|
||||||||||||||
Найдем матрицу перехода от (I) к (II). |
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
1 |
1 |
(координаты векторов e1′ |
и e′2 в |
|||
В силу определения 1 T = |
|
|||||||||||||||||
(I) располагаем по столбцам). |
1 |
2 |
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
||||||||||||
Обозначим (β1,β2 ) координаты вектора x в (II). |
|
|||||||||||||||||
Воспользуемся теоремой 1. Найдем T −1 . |
2 |
−1 |
|
|||||||||||||||
|
T |
|
= |
|
1 |
1 |
|
|
= 2 −1 =1 , |
|
|
|||||||
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
T −1 = |
−1 |
|
|
|
|||||||
|
|
|
|
|
|
|
1 |
2 |
|
|
|
|
|
|
|
1 |
|
|
и по формуле (6.2) получим |
|
|
|
|
|
|
|
|
||||||||||
|
β |
|
|
|
2 |
−1 |
6 |
12 −9 |
|
3 |
|
|||||||
|
1 |
|
|
= |
|
|
|
= |
= |
. |
|
|||||||
|
β2 |
|
|
−1 |
1 |
9 |
−6 +9 |
|
3 |
|
||||||||
Итак, x = 3e1′ +3e′2 .