

Лабы по механике 1.1-1.14
.pdfпредварительно необходимо ослабить гайку, не видимую на рис.1.6.1 за шкалами. На специальных направляющих закреплен электромагнит 17, который можно перемещать относительно шкалы 16 и фиксировать двумя винтами, не показанными на рис.1.6.1. Сила притяжения между шаром 13 и электромагнитом 17 регулируется винтом 18.
На основании 1 установки смонтирован микросекундомер 19, от которого через специальный разъем напряжение подводится к шарам и электромагниту.
На лицевой панели микросекундомера 19 расположены следующие кнопки:
9«сеть» – выключатель питающего напряжения; нажатие этой кнопки запитывает прибор и обнуляет все индикаторы микросекундомера;
9«сброс» – установка нуля таймера; нажатие этой кнопки вызывает сброс схем микросекундомера;
9«пуск» – управление электромагнитом; нажатие этой кнопки выключает электромагнит, что
приводит в движение шар 13.
ТЕОРИЯ МЕТОДА
§ 1.6.1. Понятие о механическом ударе тел
Ударом называется столкновение тел, при котором за весьма малый промежуток времени происходит значительное изменение скоростей тел.
Линией удара называется общая нормаль, проведенная к поверхностям двух соударяющихся тел в месте их соприкосновения при ударе. Удар называется центральным, если в момент удара центры инерции сталкивающихся тел находятся на линии удара. Примером такого удара может служить удар двух одинаковых шаров. Удар называется прямым, если скорости центров инерции сталкивающихся тел перед ударом направлены параллельно линии удара. В противном случае удар называется косым.
При ударе тела деформируются, и в месте их соприкосновения возникают кратковременно действующие, но весьма значительные силы, называемые ударными силами. Для системы соударяющихся тел эти силы являются внутренними, то есть ударные силы не изменяют суммарного импульса системы (ударные реакции связей при ударе не возникают!). Поэтому, хотя импульсы ударных сил за время τ продолжительности удара соизмеримы с импульсами сталкивающихся тел, результирующий импульс всех постоянно действующих внешних сил за тот же промежуток времени τ мал по сравнению с импульсами рассматриваемых тел. Соответственно и работа внешних сил над системой за время τ мала по сравнению с механической энергией системы. Таким образом, систему тел в процессе их соударения можно приближенно считать замкнутой системой, а при расчете результатов удара пользоваться фундаментальными законами сохранения импульса, момента импульса и энергии. Если при ударе тела деформируются как вполне упругие, то ударные силы потенциальны, и в системе выполняется закон сохранения механической энергии.
Удар двух тел называется абсолютно неупругим, если после удара оба тела движутся как одно целое либо покоятся. При неупругом ударе в соударяющихся телах происходят различного
51
рода процессы такие, как пластическая деформация, трение и другие, в результате которых кинетическая энергия системы частично преобразуется во внутреннюю энергию соударяющихся тел. В этом случае выполняется закон сохранения импульса и закон сохранения суммарной энергии различных видов.
Удар двух тел называется абсолютно упругим, если при этом ударе механическая энергия системы не изменяется, то есть тела являются абсолютно упругими. При таком ударе кинетическая энергия переходит полностью или частично в потенциальную энергию упругой деформации. Потенциальная энергия деформации переходит затем в кинетическую энергию движения. Данный процесс перехода одного вида энергии в другой осуществляется до тех пор, пока тела контактируют друг с другом. Идеально упругому удару соответствует полное восстановление формы соударяющихся тел. Время соударения зависит от упругих констант материала, их относительной скорости в момент, непосредственно предшествующий удару, и от их масс. Величины и направления скоростей тел после удара определяется на основе двух законов сохранения: полной механической энергии и полного импульса системы тел.
Процесс столкновения принято характеризовать длительностью и силой удара, возникшей в результате столкновения тел. На установке для исследования удара шаров (см. рис. 1.6.1) смонтирована система, позволяющая определять время столкновения шаров с помощью электронного микросекундомера. Последний включен в электрическую цепь, в которой шары играют роль контактов коммутатора цепи.
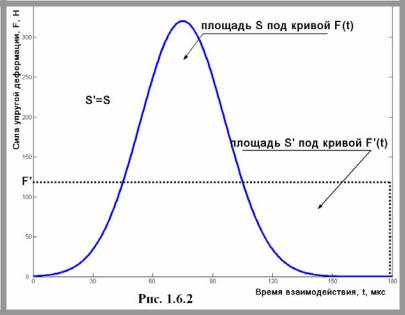
Сила, возникающая в процессе столкновения шаров, не остается постоянной. Модуль ее сначала растет, достигает максимального значения, после чего уменьшается до нулевого значения. Зависимость модуля силы F от времени t определяется рядом факторов, в том числе скоростью тел до столкновения, формой и материалом взаимодействующих тел. График одной из возможных зависимостей F = f (t ) приведен на рис. 1.6.2. Площадь под графиком, определяемая как определенный
t2 |
|
t = t2 − t1. |
интеграл ∫Fdt , есть модуль импульса переменной силы за промежуток времени |
||
t1 |
|
|
Эту величину можно представить как модуль импульса некоторой постоянной силы |
F′ за тот же |
|
промежуток времени |
t при условии, что площади под их графиками численно равны ( S = S′ на |
|
рис. 1.6.2). |
|
|
52

Таким образом, в качестве меры механического взаимодействия шаров при ударе вместо переменной силы F может служить импульс некоторой постоянной силы F′ за тот же промежуток времени t :
(1.6.1) |
t∫2 Fdt = F′ |
t . |
|
|
|
t1 |
|
Если модуль импульса тела за время |
t изменяется на конечную величину p , то на |
||
основании второго закона Ньютона можно записать: |
|
||
(1.6.2) |
F′ |
t = (p)= |
(mυ). |
Применяя второй закон Ньютона в форме уравнения (1.6.2) к абсолютно упругому центральному удару двух шаров, вычислим силы упругой деформации, действующие со стороны каждого шара на другой. При этом будем пользоваться только что рассмотренной идеализацией силы упругой деформации, не применяя уже знак штриха к искомой силе.
§ 1.6.2. Вывод рабочей формулы для определения силы упругой деформации
Введем горизонтальную координатную ось ОХ, проходящую через центр масс покоящихся до удара шаров и направленную влево (рис.1.6.3,а). Заметим, что направление оси совпадает с проекцией скорости (непосредственно перед ударом) «налетающего» шара
M1 . Пренебрегая силой сопротивления воздуха, запишем в проекциях на ось ОХ уравнение второго закона Ньютона для «налетающего» и «покоящегося» шаров массами M1 и M2 в
момент их взаимодействия, то есть удара:
(1.6.3) |
F12 = |
(M1υ1 ) |
t, |
(1.6.4) |
F21 = |
(M 2υ2 ) |
t, |
где F12 и F21 − проекции сил упругой деформации, действующих соответственно на шар M1 |
|||
со стороны шара M2 , и наоборот, |
|
||
(M1υ1 ), (M2υ2 )− проекции |
приращений импульсов шаров соответственно массами |
||
M1 и M2 ,
t − время взаимодействия шаров.
Согласно третьему закону Ньютона F12 = −F21 .
53
Теперь наша задача свелась к отысканию приращения импульсов шаров в момент удара,
точнее, к определению изменений скоростей υ1 и υ2 . Действительно, массы при таких малых
скоростях не изменяются, а время взаимодействия шаров |
t способен зарегистрировать |
микросекундомер 19 (см. рис. 1.6.1). |
|
Отведем шар массы M1 на угол a (рис.1.6.3,а). В этом состоянии шар M1 в поле силы тяжести (в поле консервативных сил) относительно положения равновесия обладает потенциальной энергией
(1.6.5) E = M |
1 |
gH = 2M |
1 |
gLsin2 a , |
|
|
||
1 |
|
|
2 |
|
|
|||
|
|
|
|
|
|
|
||
где L −расстояние от точки подвеса до центра масс |
шаров, H = gLsin |
2 a |
−высота |
|||||
2 |
||||||||
|
|
|
|
|
|
|
||
поднятия шара M1 . |
|
|
|
|
|
|
|
|
Если шар M1 отпустить, то его центр масс начнет двигаться вниз по дуге окружности |
||||||||
радиуса L. При этом потенциальная энергия |
E1 будет переходить в кинетическую энергию W1 |
|||||||
шара M1 и частично в энергию хаотического движения молекул окружающего шар воздуха. В
момент достижения шаром M1 положения равновесия начнется его столкновение с шаром массы
M2 .
Пренебрегая силами трения обоих шаров о воздух, можем воспользоваться законом механической энергии:
(1.6.6) E1 =W 1 = 12 M1υ12 ,
где υ1 −модуль скорости шара M1 перед столкновением определяется из выражений (1.6.5) и (1.6.6)5:
(1.6.7) |
υ1 = 2 |
gL sin a . |
|
|
|
|
|||
|
|
2 |
|
|
|
|
|
|
|
Проекции на ось ОХ скоростей после удара υ1′6 (для шара |
M1 ) и υ2′ (для шара M2 ) |
||||||||
можно представить аналогично (1.6.7): |
|
|
|
|
|
|
|
|
|
(1.6.8) |
υ1′ = 2 |
|
|
|
r |
|
|
||
gL sin |
± |
1 |
|
, |
|||||
2 |
|||||||||
|
|
|
|
|
|
|
|||
(1.6.9) |
|
r |
|
|
|
|
|||
υ2′ = 2 |
gL sin |
|
2 |
|
|
, |
|
||
2 |
|
|
|||||||
|
|
|
|
|
|
|
|||
где r1 и r2 − максимальные углы отклонения от вертикали подвесов после столкновения шаров соответственно M1 и M2 .
5 Проекция этой скорости всегда имеет знак «+»
6 Скорости шаров после удара «наделены» верхним штрихом, а нижние индексы сохранены
54
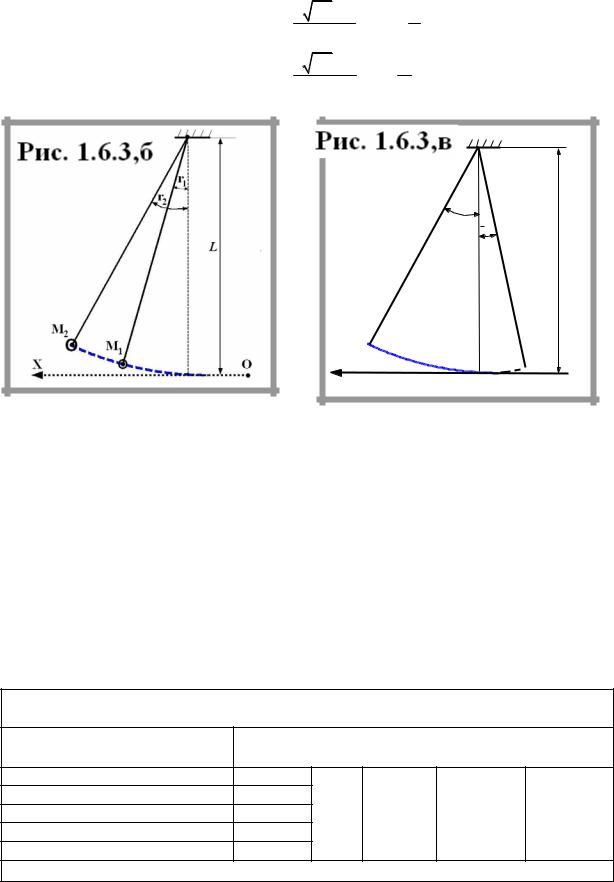
В формуле (1.6.8) « + r1» соответствует движению налетающего шара после удара влево |
||||||||||||
(рис.1.6.3,б), « − r » – вправо (рис. 1.6.3,в). Значения и знак скоростей υ′ |
и υ |
′ |
шаров после |
|||||||||
1 |
|
|
|
|
|
|
|
|
1 |
|
2 |
|
удара зависят от их состояния перед столкновением, их массы, формы, материала и т.д. |
||||||||||||
Подставив (1.6.7), (1.6.8) и (1.6.9) в (1.6.3) и (1.6.4.), |
получаем окончательные рабочие |
|||||||||||
формулы (время взаимодействия шаров |
t заменено на t ): |
|
|
|
|
|
|
|
||||
(1.6.10) |
F |
= 2 |
gLM1 |
sin |
± r1 |
|
−sin a |
|
, |
|
|
|
|
12 |
|
t |
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
||
(1.6.11) |
F |
= 2 |
gLM2 |
sin |
r2 |
. |
|
|
|
|
||
|
21 |
|
t |
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
r2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
r1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
L |
|
|
|
M2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
O |
|
|
|
|
|
M1 |
|
|
|
|
|
|
. |
|
|
|
|
|
|
. |
|
|
|
|
|
|
|
|
|
|
|
O |
|
|
|
|
|
X |
|
|
|
|
|
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
O |
|
МЕТОДИКА ВЫПОЛНЕНИЯ РАБОТЫ, РАСЧЕТЫ |
|
|
|
|
|
|
|
|
|
|||
1.Ознакомившись с методическими указаниями к лабораторной работе, получите у обслуживающего персонала задание и распечатку таблицы для занесения экспериментальных
данных во время выполнения лабораторной работы.
Примерное задание:
Рассчитать значения проекции сил, действующих при упругом взаимодействии двух шаров друг на друга в серии из пяти измерений времени взаимодействия шаров, используя второй и третий законы Ньютона, а также законы сохранения энергии и импульса.
Построить график зависимости величины суммарной среднеквадратичной погрешности силы упругой деформации, действующей на один из шаров со стороны другого шара, от относительного вклада других среднеквадратичных погрешностей опыта.
Соответствующий заданию вид распечатки:
Таблица 1.6.1. Журнал экспериментальных измерений
Лабораторная работа № 1.6 "Исследование абсолютно упругого удара двух шаров"
изм . |
t,mcs |
изм . |
r1,град |
изм . |
|
№ |
№ |
№ |
|||
|
|
||||
1 |
|
1 |
|
1 |
|
2 |
|
2 |
|
2 |
|
3 |
|
3 |
|
3 |
|
4 |
|
4 |
|
4 |
|
5 |
|
5 |
|
5 |
Задание выдано: Группа: И-12 ,
r2,град |
M1,г |
M2,г |
L,mm |
a,град |
|
|
|
|
|
10
Фамилия: Сергучев В.И.
55

2.Ознакомьтесь с внешним видом установки, проверьте ее комплектность и готовность к работе, для чего проделайте ряд подготовительных операций.
3.Гайки подвесов 10 и 12 переместите максимально вверх, на подвесы навинтите металлические шары. Винтами 9 установите такое расстояние между шарами, чтобы они едва соприкасались друг с другом. Результат измерения L занесите в таблицу 1.6.1.
4.Установите такую длину проводов 11, опустив винты подвесов 10 и 12, чтобы на уровне угловых шкал 15 и 16 находились лезвия подвесов, а риски на шарах – на одной горизонтали. Затяните винты подвесов.
Проверьте корректировку осевой установки шаров: шар, который исходно отклоняется (налетающий), поверните относительно подвеса, доводя до совпадения рисок на шарах, и затяните гайку подвеса7.
Спомощью гаек угольников шкал 15 и 16 добейтесь нулевых показаний положений шаров в исходном состоянии.
Установите электромагнит 17 с помощью соответствующих винтов на угловом расстоянии a (согласно заданию) от начала шкалы и на такой высоте по отношению к шкале 16, чтобы его ось была продолжением риски на шаре, притягиваемом электромагнитом. Затяните болт 18.
5.Подключите прибор к сети ~220 В, 50 Гц. Нажмите кнопку «сеть» микросекундомера. Отожмите кнопку «пуск».
Отведите шар M1 в правое крайнее положение. Электромагнит должен его удерживать в таком положении. При необходимости силу притяжения электромагнита можно отрегулировать воротком, находящимся рядом с винтом 18.
После этого нажмите кнопку «пуск» и проверьте, измерил ли микросекундомер время взаимодействия шаров, был ли удар центральным.
Отожмите кнопку «сброс» и проверьте, произошло ли обнуление микросекундомера.
В случае нормальной работоспособности установки приступайте к измерениям (в противном случае повторите пп. 4 и 5 еще раз и при необходимости обратитесь к обслуживающему работу персоналу).
6.Отведите шар M1 в правое крайнее положение. Запишите в табл. 1 значение угла a.
Нажмите кнопку «пуск», зафиксируйте угловые расстояния r1 (с учетом знака!) и r2 , на которые отскочат шары8. Занесите в таблицу 1.6.1 значения углов r1 и r2 , а также времени взаимодействия t по микросекундомеру.
7.Отожмите кнопку «сброс», снова выполните п.6. Результат измерения величин r1 , r2 и t
снова занесите в таблицу 1.6.1.
7 Выполнение пункта 4 необходимо для реализации центрального удара, при котором центры масс шаров до и после удара должны находиться на одной горизонтали.
8 Угловые расстояния удобно фиксировать вдвоем: каждый наблюдатель фиксирует угол отскока «своего»
шара.
56
8.Пункт 7 проделайте еще четыре раза (согласно Вашему заданию). Результат измерения величин r1 , r2 и t каждый раз заносите в таблицу 1.6.1.
9.Измерьте расстояние L от точки подвеса до центра масс шаров с помощью масштабной линейки. Результат измерения занесите в таблицу 1. В таблицу 1.6.1 занесите также значения масс шаров M1 и M2 (при необходимости взвесьте шары).
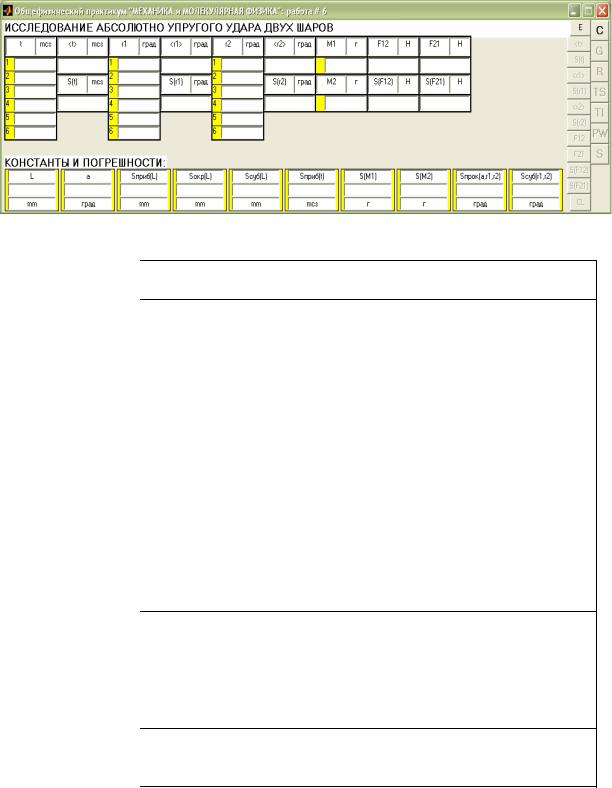
10.Изучите исходные данные таблицы 1.6.2 основного лабораторного окна программы обработки экспериментальных данных (для примерного задания).
Таблица 1.6.2. Основное лабораторное окно
ИСХОДНЫЕ ДАННЫЕ ПРОГРАММЫ (желтый фон столбцов)
t , |
mcs |
─ продолжительность |
столкновения шаров; |
|||||
|
|
─ угол (с учетом знака!), на который отскакивает |
||||||
r1, |
град |
|||||||
|
|
|
налетающий шар массы M1 после взаимодействия с |
|||||
|
|
|
первоначально покоившимся шаром массы M 2 ; |
|||||
|
|
─ угол, |
на |
который |
|
отскакивает |
первоначально |
|
r2, |
град |
|
||||||
|
|
|
покоившийся шар массы |
M 2 после взаимодействия |
||||
|
|
|
с шаром массы M1; |
|
|
|
||
|
|
|
─ масса налетающего шара; |
|
||||
M1, |
|
г |
|
|||||
|
|
|
─ масса |
первоначально |
покоившегося шара; |
|||
M 2 , |
|
г |
||||||
|
|
|
─ расстояние |
от точки |
подвеса до центра масс |
|||
L, |
|
mm |
||||||
|
|
|
шаров; |
|
|
|
|
|
|
|
|
─ угол, |
на |
который |
отклонен |
из положения |
|
a, |
|
град |
||||||
|
|
|
равновесия шар массы |
M1; |
|
|||
|
|
|
─ среднеквадратичная |
|
приборная |
погрешность |
||
Sприб(L), |
mm |
|
||||||
в измерении величины L; |
|
|
||||||
|
|
|
|
|
||||
|
|
|
─ среднеквадратичная |
|
погрешность округления в |
|||
Sокр(L), |
mm |
|
||||||
измерении величины L; |
|
|
||||||
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
57
Sсуб(L), |
mm |
|
─ среднеквадратичная |
|
субъективная |
погрешность |
|||||||
|
при измерении величины L; |
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|||||
Sприб(t), |
mcs |
|
─ среднеквадратичная |
|
приборная |
|
погрешность |
||||||
|
микросекундомера; |
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
||||||
S(M1), |
|
г |
|
− среднеквадратичная |
погрешность |
взвешивания |
(или |
||||||
|
|
|
|
максимальная погрешность как константы) груза массы M1 |
|||||||||
|
|
|
|
на весах; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
S(M 2), |
|
г |
|
− среднеквадратичная |
|
погрешность взвешивания (или |
|||||||
|
|
|
|
максимальная погрешность как константы) груза массы M 2 |
|||||||||
|
|
|
|
на весах; |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
Sпрок(a, r1, r2), |
− суммарная |
среднеквадратичная систематическая |
|||||||||||
|
град |
|
погрешность (приборная + погрешность округления) при |
||||||||||
|
|
|
|
измерении угловых расстояний a, r1, r2; |
|
|
|||||||
|
|
|
|
|
|
|
|
||||||
Sсуб(r1, r2), |
|
− субъективная |
среднеквадратичная |
погрешность |
при |
||||||||
|
измерении угловых расстояний r1, r2. |
|
|
||||||||||
|
град |
|
|
|
|||||||||
|
|
|
|
|
|
|
|
||||||
|
|
|
|
ФИЗИЧЕСКИЕ ВЕЛИЧИНЫ ТАБЛИЦЫ 1.6.2, |
|
|
|
||||||
|
|
ВЫЧИСЛЯЕМЫЕ ПРОГРАММОЙ (серый фон столбцов) |
|
|
|||||||||
< t >, |
mcs |
─ среднее |
арифметическое |
|
время |
столкновения |
|||||||
|
|
|
|
шаров; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
S(t), |
mcs |
─ среднеквадратичная |
случайная |
погрешность величины времени |
|||||||||
|
|
|
t |
столкновения шаров; |
|
|
|
|
|
|
|
||
|
|
|
|||||||||||
< r1 >, |
град |
─ среднее арифметическое значение угла, на который |
|||||||||||
|
|
|
отскакивает |
налетающий |
шар |
массы |
|
M1 |
после |
||||
|
|
|
взаимодействия с первоначально покоившимся шаром |
||||||||||
|
|
|
массы M 2 ; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
S(r1), |
град |
─ среднеквадратичная |
случайная погрешность величины угла |
||||||||||
|
|
|
r1; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
< r2 >, |
град |
─ среднее арифметическое значение угла, на который |
|||||||||||
|
|
|
отскакивает |
первоначально |
покоившийся |
шар |
массы |
||||||
|
|
|
M 2 после взаимодействия с шаром массы M1; |
|
|
||||||||
|
|
|
|
|
|||||||||
S(r2), |
град |
─ среднеквадратичная |
случайная |
погрешность величины угла |
|||||||||
|
|
|
r2; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
F12, |
|
Н |
─ проекция |
силы |
упругой |
деформации, |
действующей |
||||||
|
|
|
|
на шар массы M1 со стороны шара массы M 2 ; |
|
||||||||
|
|
|
|
||||||||||
S(F12), |
Н |
─ суммарная |
среднеквадратичная погрешность величины силы |
||||||||||
|
|
|
|
F12 ; |
|
|
|
|
|
|
|
|
|
58
F 21, |
Н |
─ проекция силы упругой деформации, действующей на |
|
|
шар массы M 2 со стороны шара массы M1; |
|
|
|
S(F 21), |
Н |
─ суммарная среднеквадратичная погрешность величины силы |
|
|
F 21. |
|
|
|
Вычисление искомых величин F12 и F 21 программа производит согласно формулам (1.6.10 и 1.6.11) раздела «Теория метода», в которых все величины берутся в системе СИ:
|
F |
|
= |
2 |
gLM1 |
sin < r1 > − sin a и |
F |
= |
2 |
gLM2 |
sin < r2 > . |
|||||
|
|
|
|
|
|
|||||||||||
|
12 |
|
|
< t > |
|
|
2 |
|
21 |
|
|
< t > |
2 |
|||
ПРИМЕЧАНИЕ |
|
|
|
|
|
|
2 |
|
|
|
||||||
При оценке систематических среднеквадратичных погрешностей |
||||||||||||||||
|
||||||||||||||||
|
Sприб (L), Sокр (L), |
Sпрок (a, r1, r2) и |
Sприб (t ) |
|
величин |
L, a, r1, r2s и t |
||||||||||
.1 |
воспользуйтесь указаниями «Краткой теории погрешностей» (§П.2.3). |
|||||||||||||||
|
Внимание. При оценке субъективных погрешностей величин |
|||||||||||||||
|
|
|||||||||||||||
|
L, r1, r2 |
следует |
принять |
значение |
среднеквадратичных |
|||||||||||
|
погрешностей равными Sсуб (L)= 0,5 мм и Sсуб (r1, r2)= 0,3 град. |
|||||||||||||||
|
Процедура |
вычисления |
среднеарифметических |
|
значений |
< t >, |
|||
|
|
||||||||
|
< r1 >, < r2 > |
и среднеквадратичных |
случайных |
погрешностей |
|||||
|
S(t), S(r1), S(r2) величин t , r1, |
r2, |
а также |
доверительного |
|||||
ПРИМЕЧАНИЕ |
интервала искомых физических величин F12 и |
F 21, кроме того, |
|||||||
оформление |
результатов |
лабораторной |
работы |
(запись |
|||||
|
|||||||||
|
окончательного результата, построение графиков) программа |
||||||||
|
выполняет следуя указаниям «Краткой теории погрешностей» (см. §§ |
||||||||
.2 |
П.2.3, 5, 6). |
|
|
|
|
|
|
|
|
Единицы длины и времени в таблице №1.6.2 обозначены |
|||||||||
|
|||||||||
|
латинскими буквами (mm |
и mcs |
соответственно) в |
силу |
|||||
|
особенностей воспроизведения строковых констант программой |
||||||||
|
обработки данных. |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
59
Среднеквадратичные суммарные погрешности S(F12) |
и S(F 21) |
искомых |
||||||||||||||||||||||||||||||||||||||||||
величин |
F12 |
|
и |
F 21 |
|
|
программа вычисляет согласно «Основным правилам |
|||||||||||||||||||||||||||||||||||||
обработки результатов косвенных измерений» (см. § П.2.4 «Краткой теории |
||||||||||||||||||||||||||||||||||||||||||||
погрешностей»). Так, для среднеквадратичной суммарной погрешности S(F12): |
||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Sприб2 (L)+ |
||||||
|
|
|
|
|
|
|
|
|
|
g M1 |
|
|
|
< r1 > |
|
|
|
|
|
|
a |
|
2 |
|
|
|
|
|
|
|||||||||||||||
|
S(F |
|
|
)= |
|
|
sin |
− sin |
|
|
+S2 |
|
(L)+ |
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
+ |
|||||||||||||||||||
|
|
|
12 |
|
|
|
|
L < t > |
|
|
|
|
|
2 |
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
окр |
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
+S2 |
|
(L) |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
суб |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
+ |
|
2 |
|
|
gL |
sin |
< r1 > |
−sin |
a |
2 |
S2 (M1)+ |
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
< t > |
|
|
|
|
|
2 |
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
+ 2 |
|
|
gLM1 |
sin < r1 > − sin a |
|
|
2 |
{ |
S2 (t ) |
+ S2 |
|
|
(t ) + |
|
|||||||||||||||||||||||||||||
|
|
|
|
< t > |
2 |
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
приб |
|
} |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
.3 ПРИМЕЧАНИЕ |
+ |
|
|
gLM1cos < r1 > |
|
2 |
{ |
S2 |
|
|
(r1) |
+ S2 |
|
(r1) |
|
+ |
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||
|
|
|
< t > |
|
|
|
|
|
|
|
2 |
|
|
|
|
прок |
|
|
|
|
|
|
|
суб |
|
|
|
} |
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
+ |
|
|
gLM1 |
cos |
a |
|
2 |
S |
2 |
|
|
(a) . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
< t > |
|
|
|
|
|
2 |
|
|
|
|
прок |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Аналогично, для среднеквадратичной суммарной погрешности S(F 21): |
||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
g M 2 |
|
|
|
|
< r2 > |
|
2 |
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
S(F |
)= |
|
|
|
sin |
|
|
Sприб (L)+ |
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
2 |
|
|
|
+ |
|
|||||||||
|
21 |
|
|
|
|
|
L < t > |
|
|
|
|
|
2 |
|
|
|
|
|
+S |
|
(L)+ S |
(L) |
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
окр |
суб |
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
2 |
gL sin < r2 |
> |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
+ |
|
|
S2 (M 2)+ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
< t > |
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
2 |
gLM 2 sin < r2 > |
2 |
{ |
S2 (t )+ S2 |
|
|
|
(t ) |
|
+ |
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
+ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
|
< t > |
2 |
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
приб |
|
|
} |
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
S2 |
|
|
(r2) |
+ S2 |
|
(r2) . |
|
|
|
|
|
|||||||||||||||
+ |
gLM 2 cos < r2 > |
|
{ |
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||
|
< t > |
|
|
|
|
|
2 |
|
|
|
|
|
прок |
|
|
|
|
|
|
|
суб |
|
|
|
|
} |
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
60