Лабы по механике 1.1-1.14
.pdf 2
2 2
2 2
2

1 |
|
1 |
|
1 |
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
2 |
|
2 |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
3 |
|
3 |
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
|
4 |
|
4 |
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5 |
|
5 |
|
5 |
|
5 |
|
D1, |
D2, |
D3, |
D4, |
D5, |
H, |
6 |
|
6 |
|
6 |
|
6 |
|
mm |
mm |
mm |
mm |
mm |
mm |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
7 |
|
7 |
|
7 |
|
7 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
8 |
|
8 |
|
8 |
|
8 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
9 |
|
9 |
|
9 |
|
9 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Задание выдано: Группа: ТМС-13, Фамилия: Ивлев И.А.
2.Ознакомьтесь с внешним видом установки, проверьте ее комплектность и готовность к работе, для чего проделайте ряд подготовительных операций.
3.Нижний кронштейн 5 установки зафиксируйте в крайнем нижнем положении.
4.На диск маятника наденьте кольцо наименьшей массы M11 , прижимая его до упора к диску.
5.Подключите установку к сети ~220 В, 50 Гц. Нажмите кнопку «сеть» миллисекундомера. Проверьте, показывают ли все его индикаторы нуль, и горят ли лампочки обоих фотодатчиков.
6.Намотайте нити подвески на ось маятника и зафиксируйте его с помощью электромагнита.
7.Проверьте, отвечает ли нижняя грань кольца нулю шкалы на колонне. Если нет, то отрегулируйте положение кольца, ослабив верхний кронштейн 4.
8.Нажмите клавишу «пуск» секундомера. Ослабьте гайку воротка 14 и отрегулируйте длину бифилярной подвески таким образом, чтобы край стального кольца после опускания маятника находился на ~2 мм ниже оптической оси фотодатчика 8. Одновременно проследите, чтобы ось маятника была параллельна основанию прибора. Затяните гайку воротка 14.
9.Отожмите клавишу «пуск» миллисекундомера.
10.Намотайте нити подвески на ось маятника, обращая внимание на то, чтобы она наматывалась равномерно, в один слой, виток к витку. Зафиксируйте маятник с помощью электромагнита. Нить при этом не должна быть сильно скручена.
Вслучае нормальной работоспособности установки приступайте к измерениям (в противном случае повторите п.п. 5…10 еще раз и при необходимости обратитесь к обслуживающему работу персоналу).
11.Нажмите кнопку «сброс» и затем «пуск». Определите первое время t1 падения маятника по миллисекундомеру. Запишите результат в таблицу 1.12.1 Повторите измерение времени t1
падения маятника еще 8 раз (согласно заданию).
12.Замените кольцо массы M11 кольцом массы M12 . Произведите девять измерений времени
t2 . Запишите результаты в таблицу 1.12.1.
13.Повторите п.12 с кольцами M13 и M14 . Результаты занесите в таблицу 1.12.1.
14.Занесите в таблицу 1.12.1 значения соответствующих диаметров и масс27, а также высоты H .
27 Значения масс выбиты на кольцах либо могут быть написаны на лабораторном столе.
113
|
|
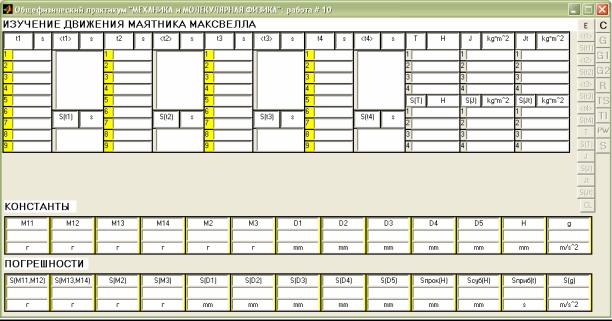
ФИЗИЧЕСКИЕ ВЕЛИЧИНЫ ТАБЛИЦЫ 1.12.2, |
|
|
|||||
|
ВЫЧИСЛЯЕМЫЕ ПРОГРАММОЙ (серый фон столбцов) |
|
|
||||||
< t1 >, |
s |
|
─ среднее |
арифметическое время падения маятника |
|||||
|
|
|
с кольцом массы M11 в n измерениях; |
|
|||||
< t2 >, |
s |
|
─ среднее |
арифметическое время падения маятника |
|||||
|
|
|
с кольцом массы M12 в n измерениях; |
|
|||||
< t3 >, |
s |
|
─ среднее |
арифметическое время падения маятника |
|||||
|
|
|
с кольцом массы M13 в n измерениях; |
|
|||||
< t4 >, |
s |
|
─ среднее |
арифметическое время падения маятника |
|||||
|
|
|
с кольцом массы M14 в n измерениях; |
|
|||||
S(t1), |
s |
|
─ среднеквадратичная |
случайная погрешность времени |
|||||
|
|
|
падения маятника с кольцом массы M11 в n |
||||||
|
|
|
измерениях; |
|
|
|
|
|
|
|
|
|
|
|
|||||
S(t2), |
s |
|
─ среднеквадратичная |
случайная погрешность времени |
|||||
|
|
|
падения маятника с кольцом массы M13 в n |
||||||
|
|
|
измерениях; |
|
|
|
|
|
|
|
|
|
|
|
|||||
S(t3), |
s |
|
─ среднеквадратичная |
случайная погрешность времени |
|||||
|
|
|
падения маятника с кольцом массы M11 в n |
||||||
|
|
|
измерениях; |
|
|
|
|
|
|
|
|
|
|
|
|||||
S(t4), |
s |
|
─ среднеквадратичная |
случайная погрешность времени |
|||||
|
|
|
падения маятника с кольцом массы M14 в n |
||||||
|
|
|
измерениях; |
|
|
|
|
|
|
|
|
|
|
|
|
||||
Ti , |
Н |
|
─ значение |
силы натяжения нити, полученное |
по |
||||
|
результатам |
n |
измерений |
падения |
маятника |
с |
|||
|
|
|
|||||||
|
|
|
i −ым сменным кольцом; |
|
|
|
|||
|
|
|
|
|
|
|
|
||
S(T )i , |
Н |
|
─ суммарная |
|
|
среднеквадратичная |
погрешность |
||
|
значения |
силы натяжения нити, полученного по |
|||||||
|
|
|
|||||||
|
|
|
результатам |
n |
измерений |
падения |
маятника |
с |
|
|
|
|
i −ым сменным кольцом; |
|
|
|
|||
|
|
|
|
|
|
|
|||
Ji , |
kg*m2 |
|
─ момент |
инерции |
маятника |
с i −ым сменным |
|||
|
|
|
кольцом, определенный по результатам n |
||||||
|
|
|
измерений падения маятника; |
|
|
|
|||
|
|
|
|
|
|
||||
S(J )i , |
2 |
|
─ суммарная |
среднеквадратичная |
погрешность момента |
||||
kg*m |
|
инерции |
маятника с i −ым сменным кольцом, |
||||||
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
116