3.Произведите юстировку оси вращения диска, положив на его поверхность сначала параллельно передним юстировочным винтам горизонтальный уровень19, затем, развернув уровень на 90D20.
Наконец, проверьте юстировку, повернув уровень еще раз на 90D.
После юстировки установка не должна сдвигаться с места в течение выполнения работы, в противном случае установку следует вновь юстировать.
4.Подключите установку к сети ~220 В, 50 Гц: блок питания и миллисекундомер. Нажмите кнопку «сеть» миллисекундомера. Проверьте, показывают ли все его индикаторы нуль, и горит ли индикатор фотодатчика.
Проводники от установки крутильных колебаний подключите к блоку питания (черный проводник к «земле»). Ручкой «регулировка» установите по вольтметру источника 14…15 В.
В случае нормальной работоспособности установки приступайте к измерениям (в противном случае повторите п.4 еще раз и при необходимости обратитесь к обслуживающему работу персоналу).
5.Отклоните ненагруженный диск на угол ϕ от положения равновесия, установите постоянную амплитуду колебаний с помощью ручки регулятора колебаний, расположенной на устройстве управления диском 7 (см. рис. 1.11.1)21.
6.Определите первое время t1 полных 25-ти колебаний (согласно заданию) ненагруженного диска
впервой серии. Для этого после того как маятник совершит (N −1) указанных в задании полных колебаний, нажмите кнопку «стоп». Левый индикатор покажет Вам число N полных колебаний, правый – время этих колебаний. Запишите первое показание t1 в таблицу 1.11.1.
7.Снимите еще четыре показания (согласно примерному заданию) времени t1 N полных колебаний в первой серии измерений. Результаты занесите в таблицу 1.11.1.
8.Проделайте п.п. 6 и 7 для диска, нагруженного эталонным телом, момент инерции которого должен быть заранее известен (этим телом может быть любое тело, которое предложит Вам обслуживающий работу персонал). Результат измерения времени t2 каждый раз заносите в таблицу 1.11.1.
9.Проделайте п.п. 6 и 7 для диска, нагруженного исследуемым телом (согласно Вашему заданию). Результат измерения времени t каждый раз заносите в таблицу 1.11.1.
10.Проделайте вторую серию измерений с диском, нагруженным эталонным телом и диском, нагруженным исследуемым телом. Для этого измените расстояние L от центра масс тел до оси вращения. Результаты измерения времени t2 и t занесите в таблицу 1.11.1.
11.Еще раз измените расстояние L от центра масс тел (эталонного и исследуемого) до оси вращения. Проделайте третью серию измерений с диском, нагруженным эталонным телом и
19 Юстировку производите с помощью этих же винтов.
20 Юстировку производите с помощью третьего винта.
21 Внимание! Запрещается отклонять диск от положения равновесия более чем на 900.
101
диском, нагруженным исследуемым телом. Результаты измерения времени t2 и t занесите в таблицу 1.11.1.
12.Занесите в таблицу 1.11.1 геометрические размеры x, y и массу m исследуемого тела, а
также массу m1 22 и момент инерции I1 эталонного тела.
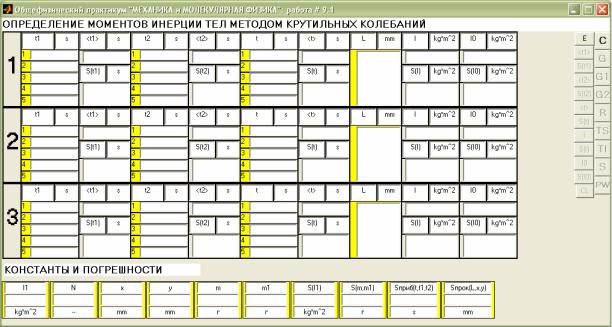
13.Изучите исходные данные таблицы 1.11.2 основного лабораторного окна программы обработки экспериментальных данных (для примерного задания).
Таблица 2. Основное лабораторное окно
Внимание! Номер серии определяется цифрой в левом углу.
|
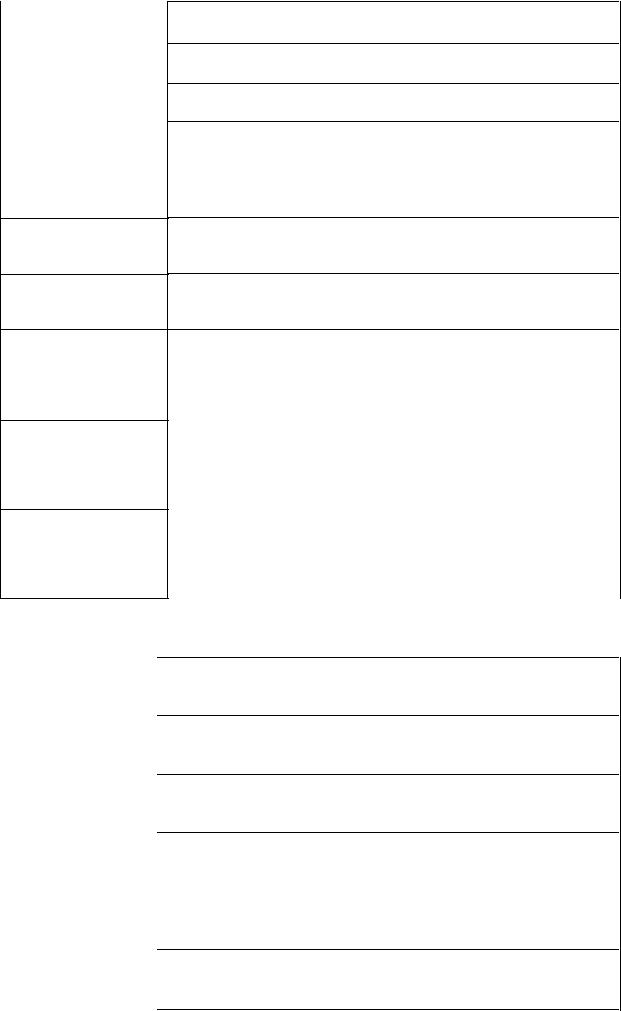
ИСХОДНЫЕ ДАННЫЕ ПРОГРАММЫ (желтый фон столбцов) |
|
t1, |
s |
─ время |
N полных колебаний ненагруженного диска |
|
|
|
в соответствующей серии измерений; |
|
|
|
|
|
|
|
|
|
t2, |
s |
─ время |
N полных |
колебаний диска с |
эталонным |
|
|
|
телом в соответствующей серии измерений; |
|
|
|
|
|
|
t , |
s |
─ время |
N полных колебаний диска с исследуемым |
|
|
|
телом в соответствующей серии измерений; |
|
|
|
|
|
L, |
mm |
─ расстояние от оси вращения до центра масс |
|
|
|
исследуемого тела в соответствующей серии |
|
|
|
измерений; |
|
|
|
|
|
|
|
|
|
|
|
|
|
I1, |
kg*m2 |
─ момент инерции эталонного тела; |
|
|
|
|
|
|
|
|
|
|
N |
|
─ количество |
полных колебаний |
для любой |
серии |
|
|
|
измерений |
(задается |
преподавателем |
или |
|
|
|
обслуживающим |
персоналом |
перед |
началом |
|
|
|
эксперимента); |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
22 Значения масс тел могут быть на лабораторном столе.
102
I, |
kg*m2 |
─ момент инерции исследуемого тела, определенный |
|
|
методом крутильных колебаний в соответствующей |
|
|
серии измерений; |
|
|
|
S(I ), |
kg*m2 |
─ суммарная |
среднеквадратичная погрешность момента |
|
|
инерции |
исследуемого |
тела, |
определенного |
|
|
методом крутильных колебаний в соответствующей |
|
|
серии измерений; |
|
|
|
I0, |
kg*m2 |
─ момент инерции исследуемого тела, |
рассчитанный |
|
|
теоретически; |
|
|
|
S(I0), |
kg*m2 |
─ суммарная |
среднеквадратичная |
погрешность |
|
|
момента |
инерции |
исследуемого |
тела, |
|
|
рассчитанного теоретически. |
|
|
Вычисление по результатам эксперимента искомой величины I
|
в каждой серии измерений |
программа производит согласно формуле |
|
(1.11.8) раздела «Теория метода», в которой все величины берутся в |
.1ПРИМЕЧАНИЕ |
системе СИ: |
|
|
|
|
|
|
|
I = |
I1 |
< t >2 − < t1 >2 |
|
|
|
|
|
, |
|
|
< t |
2 |
>2 − < t >2 |
|
|
|
|
|
1 |
|
|
При оценке приборной среднеквадратичной погрешности |
|
Sприб(t,t1,t2) |
величин t, t1,t2 и максимальной среднеквадратичной |
|
погрешности константы I1 |
воспользуйтесь указаниями «Краткой |
|
теории погрешностей» (§П.2.3). |
|
|
|
Теоретическое вычисление искомой величины I0 в каждой серии измерений программа производит согласно формуле, отвечающей геометрической форме соответствующего тела, привлекая затем теорему Штейнера о переносе осей, а именно (все величины берутся в системе СИ):
(1) I0 = 121 m(x2 + y2 )+ mL2 → пластина; (2) I0 = 15 mR2 + mL2 → полушар;
(3) I0 = 12 mr 2 + mL2 → цилиндр.
При оценке систематических среднеквадратичных погрешностей
S(m), Sпрок(L, x, y), Sпрок(L, R), Sпрок(L, r) величин m, L, x, y, R,r воспользуйтесь указаниями «Краткой теории
погрешностей» (§П.2.3).
Графики, изображаемые на одной координатной сетке по нажатии |
кнопки |
G , зависимости |
I = f (L) |
и I0 = f (L) |
момента |
инерции |
исследуемого тела экспериментального I |
и теоретического |
I0 от расстояния, |
отсчитываемого от оси вращения |
L до его центра масс, программа строит поточечно, |
используя |
в качестве аргумента |
величину L соответствующей серии измерений, а |
качестве функции – соответствующие значения моментов инерции |
I и I0. |
При этом голубым цветом отмечены экспериментальные значения (на графике надпись – experiment), красным – теоретические (на графике надпись – theory).
Среднеквадратичная суммарная погрешность S(L) любого аргумента равна
Sпрок(L). На каждом графике для каждой ординаты и абсциссы программа фиксирует
погрешность, откладывая вверх и вниз, влево и вправо величину доверительного интервала. На графиках получаются прямоугольники погрешностей для каждого экспериментального и теоретического значений.
|
|
График |
|
|
зависимости |
|
|
(по |
|
нажатии |
кнопки |
G1) |
|
S(I )= f (S′(I )) суммарной погрешности искомой величины |
от |
вклада |
|
других погрешностей (например, по результатам первой серии измерений; |
|
индекс «1» опущен) программа строит поточечно, используя в качестве |
|
аргумента сумму раздельных значений соответствующих вычисленных |
.8ПРИМЕЧАНИЕ |
среднеквадратичных погрешностей: |
|
|
|
|
− < t |
>2 {S(t)+ Sприб(t)}+ |
|
|
= < t >2 − < t >2 S(I1 ) |
+ < t >2 |
|
|
|
|
|
|
|
S′(I )= S′(I )I1 |
+S′(I )t |
+S′(I )t1 +S′(I )t2 |
= |
|
|
|
|
|
< t >2 − < t >2 |
|
|
|
2I |
1 |
< t > |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
1 |
|
|
2 |
|
|
|
1 |
|
|
|
|
|
|
|
|
+ |
2I1 < t > |
(< t >2 −2 < t2 >2 ){S(t ) |
+ S |
приб |
(t |
)}+ |
|
|
|
|
|
|
|
|
|
|
|
|
(< t |
|
>2 − < t >2 )2 |
|
|
|
1 |
|
|
|
1 |
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2I1 < t2 > (< t >2 − < t1 >2 ){S(t2 )+ Sприб(t2 )}. |
|
|
|
|
|
|
(< t |
2 |
>2 − < t >2 )2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
14. Выключите установку и переходите к автоматизированной системе на свободный компьютер, предварительно ознакомившись с инструкцией по использованию программы обработки экспериментальных данных (см. П.1).
15.Произведите вычисление результата, расчет погрешностей и построение графиков (экспериментального и теоретического) зависимости момента инерции пластины от расстояния
ее центра инерции до оси вращения на одной координатной сетке с помощью программы обработки экспериментальных данных. Подготовьте результаты к печати.
16. Распечатайте отчет: числовой результат в системе СИ вместе с погрешностями (абсолютной и

относительной) с учетом коэффициента доверия, а также графический результат (на обороте этого же листа). Прикрепите к отчету свою таблицу 1.11.1 «Журнал экспериментальных измерений».
17. Проанализируйте полученные результаты. Сделайте выводы о характере произведенных измерений и характере погрешностей, примененных в работе; о зависимости точности полученного результата от характера учитываемых при этом погрешностей (в этом Вам помогут графики ─ кнопки G1 и G2 в таблице 1.11.2); проанализируйте также правильность произведенного программой округления результата и записи конечного результата (см. §§ П.2.5, 6 «Краткой теории погрешностей»).
ВОПРОСЫ к ЗАЩИТЕ ЛАБОРАТОРНОЙ РАБОТЫ № 1.11
1.Согласуются ли полученные Вами экспериментальные результаты с теоремой Штейнера о переносе осей инерции? Как Вы можете это доказать?
2.Дайте понятие момента инерции тела относительно оси вращения (относительно точки вращения). Сформулируйте теорему Штейнера. Дайте понятие гармонических колебаний.
3.Сформулируйте второй закон Ньютона для вращательного движения (в интегральной и дифференциальной формах). Примените его к Вашему случаю.
4.Как с математической точки зрения называется полученная Вами функция I = f (L)?
Согласуется ли она с теоретической кривой I0 = f (L)?
5.Обоснуйте занесенные Вами в таблицу 1.11.2 (исходных данных) значения среднеквадратичных погрешностей приборов при измерении соответствующих величин и среднеквадратичных погрешностей других величин (веса пластины, например).
6.Пользуясь «Краткой теорией погрешностей» и замечаниями к работе, проверьте правильность расчета программой среднеквадратичных случайных погрешностей S(t(1)), S(t(2)), S(t) и среднеквадратичных суммарных погрешностей S(I) и S(I0).
7.Какая погрешность, по Вашему мнению, вносит наибольший вклад в конечный результат суммарных погрешностей S(I), S(I0)?
8.Как изменится абсолютная погрешность момента инерции исследуемого тела относительно выбранной оси вращения, если уменьшить значение коэффициента доверия α?
9.Как изменится результат и его погрешность, если увеличить количество измерений времени полных колебаний диска, проведенных Вами, например, в два раза? Почему?
10.Докажите вычислением на бумаге, что момент инерции тонкого стержня и тонкой пластины
относительно центра масс вычисляется по формулам: J |
C |
= 1 |
12 |
mL2 |
и |
|
|
|
|
JC = 112m(x2 + y2 ).
11.Изложите очень кратко суть выполненной вами лабораторной работы (в 3…5 предложениях).
*****Лабораторная работа № 1.11 (9)*****
РАЗДЕЛ 1. МЕХАНИКА и МОЛЕКУЛЯРНАЯ ФИЗИКА
ИЗУЧЕНИЕ ДВИЖЕНИЯ МАЯТНИКА МАКСВЕЛЛА
С ИСПОЛЬЗОВАНИЕМ АВТОМАТИЗИРОВАННОЙ СИСТЕМЫ ОБРАБОТКИ ЭКСПЕРИМЕНТАЛЬНЫХ ДАННЫХ
Методические указания к лабораторной работе № 1.12 (10)
для студентов инженерных специальностей
№1.12 (10)
ЦЕЛЬ РАБОТЫ
Применение законов поступательного и вращательного движений, а также закона сохранения механической энергии к твердому телу и вычисление его момента инерции; сравнение экспериментального и теоретического моментов инерции.
ПРИБОРЫ и ПРИНАДЛЕЖНОСТИ, применяемые в работе: маятник Максвелла,
комплект сменных колец, миллисекундомер, фотодатчики, электромагнит; персональный компьютер Р-III, математическое обеспечение работы, принтер HP-1000.
ОПИСАНИЕ МАЯТНИКА МАКСВЕЛЛА
Описание установки приводится в соответствии с технико-эксплуатационной документацией завода-изготовителя установки
[8].
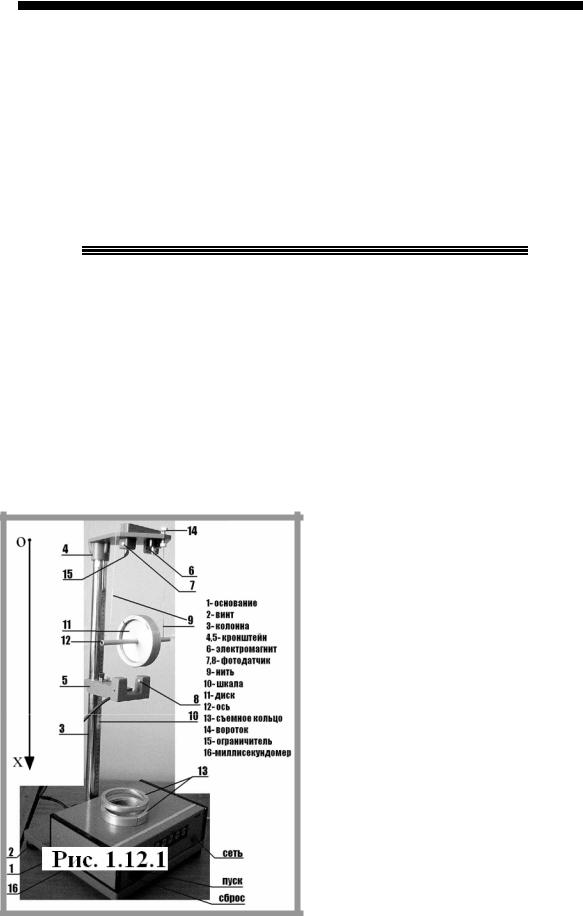
Маятник Максвелла – это диск 11 (рис. 1.12.1), закрепленный на оси 12 и подвешенный бифилярно на двух нитях 9. На диск могут накладываться сменные кольца 13, в результате чего изменяется момент инерции маятника.
Общий вид установки представлен на рис.1.12.1. Основание 1 прибора оснащено регулируемыми ножками 2, обеспечивающими вертикальное юстирование установки. На основании 2 закреплена колонна 3, к которой крепятся неподвижный верхний и подвижный
нижний кронштейны 4 и 5. На верхнем кронштейне 4 находится электромагнит 6, фотоэлектрический датчик 7 и вороток 14 для фиксации и регулирования длины бифилярной подвески 9 маятника.
Нижний кронштейн 5 вместе с смонтированным на нем фотодатчиком 8 можно перемещать вдоль колонны и фиксировать в избранном положении.
Маятник с зафиксированным (за счет плотной посадки) кольцом удерживается в верхнем положении электромагнитом 6. На кронштейне 4 расположен ограничитель 15, препятствующий дальнейшему подъему маятника при накручивании нити на ось 12. Длина маятника определяется по миллиметровой шкале 10, нанесенной на колонне 3. С целью облегчения этого измерения нижний кронштейн 5 снабжен указателем, помещенным на уровне оптической оси нижнего фотодатчика 8.
На основании 1 установки смонтирован миллисекундомер 16, от которого через специальный разъем осуществляется электрическая связь с фотодатчиками 7,8 .
На лицевой панели миллисекундомера 16 расположены следующие кнопки:
9«сеть» – выключатель питающего напряжения; нажатие этой кнопки запитывает прибор
(светятся лампочки фотодатчиков) и обнуляет все индикаторы миллисекундомера;
9«сброс» – установка нуля таймера; нажатие этой кнопки вызывает сброс схем миллисекундомера;
9«пуск» – управление электромагнитом; нажатие этой кнопки выключает электромагнит и генерирует импульс разрешения на измерение.
ТЕОРИЯ МЕТОДА
Маятник Максвелла, как уже было отмечено, представляет собой небольшой диск, жестко закрепленный на оси, опускающийся под действием силы тяжести на двух нитях, предварительно намотанных на ось диска (см. рис. 1.12.1). Во время движения вниз нити разматываются на всю длину, а диск, продолжая вращаться в прежнем направлении, наматывает нити на ось, вследствие чего он поднимается вверх против силы тяжести, замедляя при этом свое движение. Дойдя до верхней точки своего подъема, диск снова начинает двигаться вниз и т.д. Таким образом, диск совершает колебательные движения вниз-вверх, поэтому это устройство называется маятником.
При движении вниз-вверх центр масс маятника совершает поступательное движение и одновременно маятник как твердое тело вращается вокруг своей оси симметрии.
Уравнение поступательного движения центра масс маятника без учета силы трения в проекциях сил на ось ОХ (см. рис. 1.12.1) имеет вид:
(1.12.1) M1a = M1g − 2T ,
где M1g и T − проекции сил тяжести и натяжения нити, a − проекция линейного ускорения маятника,
M1 = M1i + M2 + M3 − общая масса маятника, состоящая из массы сменного кольца
M1i с номером i и масс оси M2 и диска M3 .
Уравнение вращательного движения маятника в проекциях сил на ось вращения (также без учета силы трения) имеет вид:
(1.12.2) Jε = TD ,


 (
(