Лабы по механике 1.1-1.14
.pdf8.После того как маятник совершит (N −1) указанных в задании полных колебаний, нажмите кнопку «стоп». Левый индикатор покажет Вам число N полных колебаний, правый – время этих колебаний. Запишите первое показание времени t в первой серии измерений в таблицу 1.10.1.
9.Повторите п.8 три раза (согласно примерному заданию) и запишите результаты измерений времени t N полных колебаний в первой серии измерений в таблицу 1.10.1.
10.Снимите маятник с кронштейна 4 и переместите призму 1 к центру масс стержня на 10 мм.
Выполните п.п. 7…9 и запишите результаты измерений времени t N полных колебаний во второй серии измерений в таблицу 1.10.1.
11.Повторите п.10 еще пять раз, то есть пять серий (согласно примерному заданию), в каждой серии занося по четыре значения времени t N полных колебаний в таблицу 1.10.1.
12.Проделайте эксперимент с перевернутым маятником, поместив маятник с помощью призмы 2 на вкладыш кронштейна 4, в соответствии с предписаниями п.п. 7…11.
13.Изучите исходные данные таблицы 1.10.2 основного лабораторного окна программы обработки
экспериментальных данных (для примерного задания).
Таблица 1.10.2. Основное лабораторное окно
|
ИСХОДНЫЕ ДАННЫЕ ПРОГРАММЫ (желтый фон столбцов) |
|
|||||||
|
|
|
|
N |
|
|
|
|
|
t1, |
s |
─ |
время |
полных |
колебаний |
маятника |
в |
||
|
|
|
неперевернутом |
состоянии |
в соответствующей |
||||
|
|
|
серии измерений; |
|
|
|
|
||
|
|
|
|
N |
|
|
|
|
|
t2, |
s |
─ |
время |
полных |
колебаний |
маятника |
в |
||
|
|
|
перевернутом состоянии в соответствующей серии |
||||||
|
|
|
измерений; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
91
L, |
mm |
|
─ длина стержня физического маятника; |
|
|
|
|||||
|
|
|
|
|
|
||||||
L1, |
mm |
|
─ расстояние |
между опорной гранью одной из призм |
|||||||
|
|
|
|
и ближайшим концом стержня12; |
|
|
|
||||
|
|
|
|
|
|
||||||
L2, |
mm |
|
─ расстояние |
между опорной гранью другой призмы и |
|||||||
|
|
|
|
ближайшим концом стержня; |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
||
N |
|
|
─ |
число |
полных |
колебаний |
маятника |
в |
|||
|
|
|
|
соответствующей серии измерений; |
|
|
|
||||
|
|
|
|
|
|||||||
pi |
|
|
─ число π , количество знаков после запятой в |
||||||||
|
|
|
|
котором определяет экспериментатор; |
|
|
|||||
|
|
|
|
|
|
|
|||||
Smax (pi) |
|
− |
максимальная |
среднеквадратичная |
погрешность |
||||||
|
|
|
|
константы π ; |
|
|
|
|
|
||
|
|
|
|
|
|||||||
Sпрок(L, L1, L2), |
|
─ среднеквадратичная |
систематическая (приборная + |
||||||||
|
|
|
|
погрешность округления) |
погрешность |
при |
|||||
|
mm |
|
|
измерении расстояний |
L, L1, L2; |
|
|
|
|||
|
|
|
|
|
|||||||
Sсуб(L1, L2), mm |
|
─ среднеквадратичная |
субъективная погрешность |
||||||||
|
|
|
|
при |
измерении расстояний L1, L2; |
|
|
|
|||
|
|
|
|
|
|
||||||
Sприб(t1, t2), s |
|
─ среднеквадратичная |
приборная |
погрешность |
|||||||
|
|
|
|
миллисекундомера. |
|
|
|
|
|
||
|
|
|
|
|
|
|
|||||
|
|
ФИЗИЧЕСКИЕ ВЕЛИЧИНЫ ТАБЛИЦЫ 1.10.2, |
|
|
|
||||||
|
ВЫЧИСЛЯЕМЫЕ ПРОГРАММОЙ (серый фон столбцов) |
|
|
||||||||
< t1 >, |
─ среднее |
арифметическое |
время |
N полных колебаний |
|
||||||
sмаятника в неперевернутом состоянии в критической серии измерений13;
|
|
|
|
|
|
|
S(t1), |
s |
─ среднеквадратичная |
N |
|
случайная погрешность времени t1 |
|
|
|
измерения |
полных колебаний |
маятника в |
||
|
|
неперевернутом состоянии в критической серии измерений; |
||||
|
|
|
|
|||
< t2 >, |
s |
─ среднее арифметическое |
время N полных колебаний |
|||
|
|
маятника в перевернутом состоянии в критической серии |
||||
|
|
измерений; |
|
|
|
|
|
|
|
|
|
|
|
S(t2), |
s |
─ среднеквадратичная |
случайная |
погрешность времени |
t2 измерения |
|
|
|
N полных колебаний маятника в перевернутом состоянии |
||||
12 Начальные значения положений опорных призм L1 и L2 (желтый фон) экспериментатор
заносит в нижние строки двух таблиц вместе со значениями времен колебаний маятника. Другие два значения L1 и L2 из числа занесенных (серый фон в таблице «Константы и погрешности»)
вычисляются программой для определения приведенной длины физического маятника.
13 Критической серией измерений назовем такую серию (для неперевернутого и перевернутого
маятника), в которой определяется приведенная длина.
92
|
|
|
|
в критической серии измерений; |
|
|
|
|
|||||
|
|
|
|
|
|
|
|||||||
T1, |
|
s |
|
─ период N полных колебаний |
маятника в |
неперевернутом |
|||||||
|
|
|
|
состоянии в критической серии измерений; |
|
|
|||||||
|
|
|
|
|
|
|
|||||||
T 2, |
|
s |
|
─ период N полных колебаний |
маятника |
в перевернутом |
|||||||
|
|
|
|
состоянии в критической серии измерений; |
|
|
|||||||
|
|
|
|
|
|
|
|||||||
g1, |
|
m/s2 |
|
─ ускорение |
свободного |
падения, полученное по результатам |
|||||||
|
|
|
|
движения неперевернутого маятника в критической серии |
|||||||||
|
|
|
|
измерений; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
S(g1), m/s2 |
|
─ суммарная |
среднеквадратичная |
погрешность ускорения свободного |
|||||||||
|
|
|
|
падения, |
полученная |
|
по |
|
результатам |
движения |
|||
|
|
|
|
неперевернутого маятника в критической серии измерений; |
|||||||||
|
|
|
|
|
|
|
|
||||||
g2, |
|
m/s2 |
|
─ ускорение |
свободного |
падения, |
полученное по результатам |
||||||
|
|
|
|
движения перевернутого маятника в соответствующей |
|||||||||
|
|
|
|
серии измерений; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
S(g2),m/s2 |
|
─ суммарная |
среднеквадратичная |
погрешность ускорения свободного |
|||||||||
|
|
|
|
падения, |
полученная |
по |
результатам |
движения |
|||||
|
|
|
|
перевернутого маятника в критической серии измерений; |
|||||||||
|
|
|
|
|
|
|
|||||||
< g >, |
m/s2 |
|
─ среднее |
арифметическое |
значение ускорения свободного |
||||||||
|
|
|
|
падения по результатам критических серий измерений для |
|||||||||
|
|
|
|
неперевернутого и перевернутого маятников; |
|
||||||||
|
|
|
|
||||||||||
< S(g)>, |
|
─ усредненная в критических сериях измерений суммарная |
|||||||||||
|
m/s2 |
|
среднеквадратичная |
погрешность ускорения свободного падения |
|||||||||
|
|
для неперевернутого и перевернутого маятников. |
|||||||||||
|
|
|
|
||||||||||
|
|
|
|
|
|||||||||
|
|
|
|
||||||||||
|
|
Процедура вычисления среднеарифметических |
значений < t1 >,< t2 > |
||||||||||
|
и |
среднеквадратичных случайных |
погрешностей S(t1),S(t2) величин |
||||||||||
|
t1, t2 |
в каждой критической серии измерений, а также доверительного |
|||||||||||
ПРИМЕЧАНИЕ |
интервала искомой физической |
величины |
gi , |
кроме |
того, |
оформление |
|||||||
результатов лабораторной работы (запись окончательного результата, |
|||||||||||||
построение графиков) программа выполняет следуя указаниям «Краткой |
|||||||||||||
теории погрешностей» (см. §§ П.2.3, |
5, 6). |
|
|
|
|
|
|||||||
.1 |
|
Единицы длины, |
времени |
и единица измерения ускорения в таблице |
|||||||||
|
|
||||||||||||
|
№ 1.10.2 обозначены латинскими буквами (mm, s и m/s2 |
соответственно) в |
|||||||||||
|
силу особенностей воспроизведения строковых констант программой |
||||||||||||
|
обработки данных. |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
93
|
Вычисление |
искомой величины gi |
в каждой |
серии измерений |
|||||
|
( i =1 для неперевернутого |
состояния |
маятника |
и |
i = 2 − для |
||||
|
перевернутого) |
программа производит согласно формуле (1.10.4) |
|||||||
|
раздела «Теория метода», в которой все величины берутся в системе |
||||||||
|
СИ: |
|
|
|
|
|
|
|
|
.2 ПРИМЕЧАНИЕ |
|
gi = |
4π 2 N 2 (L − L1 − L2) |
|
|
||||
|
|
< ti >2 |
, |
|
|
||||
|
|
|
|
|
|
||||
При оценке систематических среднеквадратичных погрешностей |
|||||||||
Sпрок(L, L1, L2), |
Sприб(t1,t2), и Smax (pi) |
величин |
L, L1, L2, t, |
||||||
|
|||||||||
|
и константы π |
воспользуйтесь указаниями «Краткой теории |
|||||||
|
погрешностей» (§П.2.3). |
|
|
|
|
|
|
||
|
Внимание. |
При оценке |
субъективной |
погрешности величин |
|||||
|
L1, L2 следует принять ее равной Sсуб(L1, L2)= 0,5 мм. |
|
|||||||
|
|
|
|
|
|
|
|
|
|
.3 ПРИМЕЧАНИЕ
Среднеквадратичную суммарную погрешность S(g) искомой величины g программа
вычисляет согласно «Основным правилам обработки результатов косвенных измерений» (см. § П.2.4 «Краткой теории погрешностей»). Например, для среднеквадратичной
суммарной погрешности неперевернутого маятника S(g)1 ускорения свободного
падения g1 по результатам критической серии измерений для неперевернутого маятника имеем (используем нижний индекс «1»):
S(g) |
= |
|
8πN 2 (L − L1 − L2) |
2 |
2 |
(pi) |
+ |
|
|
|
|
|||||||||
|
|
|
|
|
|
2 |
|
S |
|
|
|
|
||||||||
1 |
|
|
|
|
|
|
< t1 > |
|
|
max |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
4π |
2 |
N |
2 |
2 |
|
|
|
4π |
2 |
N |
2 |
|
2 |
{S2 |
(L1)+ S2 |
(L1)}+ |
|
|
+ |
|
|
S2 |
|
(L)+ + |
|
2 |
|
|
||||||||||
|
|
|
< t1 > |
2 |
прок |
|
|
< t1 > |
|
|
прок |
суб |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
+ 4π 2 N 2 2 {S2 (L2)+ S2 (L2)}+
< t1 >2 прок суб
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
8π |
2 |
N |
2 |
(L − L1 |
|
2 |
{S2 (t |
|
)+ S2 |
(t |
|
)}. |
||
+ |
|
|
− L2) |
|
1 |
1 |
|||||||||
|
|
|
|
< t1 > |
3 |
|
|
|
приб |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
94
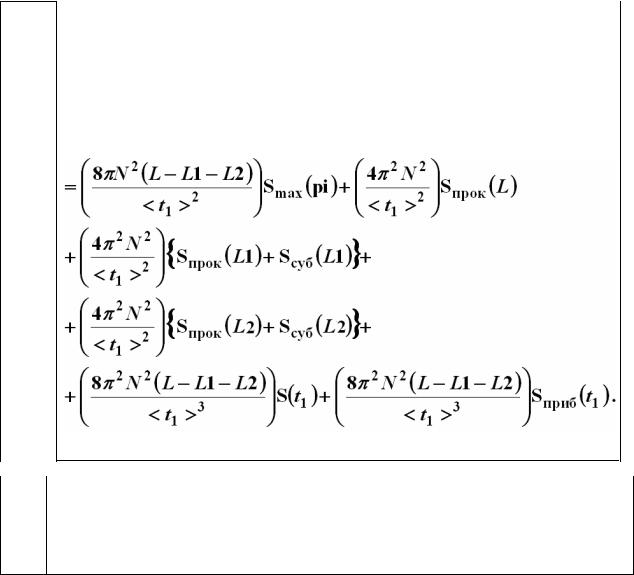
График |
зависимости |
S(g)1 = f (S′(g)1 ) суммарной |
погрешности |
искомой |
величины от |
вклада других погрешностей (по |
результатам |
критической серии измерений для неперевернутого маятника) программа строит поточечно, используя в качестве аргумента сумму раздельных значений соответствующих вычисленных среднеквадратичных погрешностей:
S′(g)1 = S′(g)1pi + S′(g)1Lprok + S′(g)1L1 + S′(g)1L2 + S′(g)1t1 + S′(g)1t1prib =
.4 ПРИМЕЧАНИЕ
|
|
Внимание! Не путать величины S(g) и S′(g) . |
||
|
|
|
1 |
1 |
|
|
|
|
|
5ПРИМЕЧАНИЕ. |
|
Среднее |
арифметическое значение |
< g > ускорения свободного |
|
|
< g >= g1 + g2 и < S(g)>= S(g1 )+S(g2 ). |
||
|
падения и усредненное значение среднеквадратичной случайной |
|||
|
погрешностей < S(g)> программа вычисляет по формулам: |
|||
14. Выключите установку и переходите к автоматизированной системе на свободный компьютер, предварительно ознакомившись с инструкцией по использованию программы обработки экспериментальных данных (см. П.1).
15.Произведите вычисление результата, расчет погрешностей и построение графика зависимости суммарной погрешности искомой величины от относительного вклада других среднеквадратичных погрешностей опыта по результатам первой серий измерений с помощью
программы обработки экспериментальных данных. Подготовьте результаты к печати.
16. Распечатайте отчет: числовой результат в системе СИ вместе с погрешностями (абсолютной и относительной) с учетом коэффициента доверия, а также графический результат (на обороте этого же листа). Прикрепите к отчету свою таблицу 1.10.1 «Журнал экспериментальных измерений».
17. Проанализируйте полученные результаты. Сделайте выводы о характере произведенных измерений и характере погрешностей, примененных в работе; о зависимости точности полученного результата от характера учитываемых при этом погрешностей (в этом Вам поможет график - кнопка G в таблице 1.10.2); проанализируйте также правильность произведенного программой округления результата и записи конечного результата (см. §§ П.2.5, 6 «Краткой теории погрешностей»).
95
ВОПРОСЫ к ЗАЩИТЕ ЛАБОРАТОРНОЙ РАБОТЫ № 1.10
1.Согласуется ли полученный Вами экспериментальный результат в пределах погрешности с табличным значением ускорения свободного падения? Если нет, дайте этому объяснение, основанное на конкретных физических недостатках примененной методики или найдите ошибку в расчетах искомой величины или ее погрешности.
2.Дайте понятие момента инерции тела относительно оси вращения (относительно точки вращения).
3.Дайте понятие маятника; физического. Запишите основное дифференциальное уравнение свободных колебаний физического маятника и его решение.
4.Какую зависимость имеет ускорение свободного падения от расстояния, отсчитываемого от
центра тяжести Земли ( g = f (r), 0 ≤ r < ∞)?
5.Обоснуйте занесенные Вами в таблицу 1.10.2 (исходных данных) значения среднеквадратичных погрешностей приборов при измерении соответствующих величин и среднеквадратичных погрешностей других величин (числа π , например).
6.Пользуясь «Краткой теорией погрешностей» и замечаниями к работе, проверьте правильность
расчета программой среднеквадратичных случайных погрешностей S(t(1)), S(t(2)) |
и |
среднеквадратичных суммарных погрешностей S(g1) и S(g2). |
|
7.Какая погрешность, по Вашему мнению, вносит наибольший вклад в конечный результат суммарных погрешностей S(g1) и S(g2)?
8.Как изменится абсолютная погрешность ускорения свободного падения, если уменьшить значение коэффициента доверия α?
9.Как изменится результат и его погрешность, если увеличить количество измерений времени полных колебаний маятника, проведенных Вами, например, в два раза? Почему?
10.Докажите вычислением на бумаге, что момент инерции тонкого стержня относительно центра масс вычисляется по формуле JC = 112mL2 .
11.Предложите практический способ оценки приведенной длины физического маятника с исходными данными Вашего задания (см. таблицу 1.10.1).
12.Вычислите нормальное значение ускорения свободного падения на поверхности Сатурна, если его масса в сто раз превышает массу Земли, а его радиус в десять раз больше земного радиуса. Можно ли для экспериментального определения искомой величины воспользоваться методикой данной лабораторной работы на Сатурне?
13.Изложите очень кратко суть выполненной вами лабораторной работы (в 3…5 предложениях).
14.Какой из методов точнее для определения величины g : математического или оборотного физического маятника? Почему?
15.Как с помощью оборотного физического маятника определить его момент инерции относительно оси, проходящей через центр масс?
*****Лабораторная работа № 1.10 (8_2)*****
96

РАЗДЕЛ 1. МЕХАНИКА и МОЛЕКУЛЯРНАЯ ФИЗИКА
ОПРЕДЕЛЕНИЕ МОМЕНТОВ ИНЕРЦИИ РАЗЛИЧНЫХ ТЕЛ МЕТОДОМ КРУТИЛЬНЫХ КОЛЕБАНИЙ
С ИСПОЛЬЗОВАНИЕМ АВТОМАТИЗИРОВАННОЙ СИСТЕМЫ ОБРАБОТКИ ЭКСПЕРИМЕНТАЛЬНЫХ ДАННЫХ
Методические указания к лабораторной работе № 1.11 (9) для студентов инженерных специальностей
№1.11 (9)
ЦЕЛЬ РАБОТЫ
Применение основного закона динамики вращательного движения для изучения свободных колебаний и зависимости момента инерции тела от распределения его массы относительно оси вращения.
ПРИБОРЫ и ПРИНАДЛЕЖНОСТИ, применяемые в работе: установка, реализующая крутильные колебания, набор исследуемых тел, источник питания, миллисекундомер, фотодатчик, штангенциркуль, уровень; персональный компьютер Р-III, математическое обеспечение работы, принтер HP-1000.
ОПИСАНИЕ УСТАНОВКИ
Главным элементом установки (см. рис. 1.11.1) является диск 1, который закреплен на вертикальной оси 13 (см. рис. 1.11.2)14, смонтированной на специальной станине 15. Диск соединен со стальной пружиной 5. Благодаря упругой связи диск после выведения из положения равновесия будет совершать вращательные колебания.
На станине имеются юстировочные винты 14, с помощью которых ось вращения диска может быть установлена строго вертикально.
На поверхности диска 1 просверлены отверстия 9, расположенные на двух взаимно
перпендикулярных прямых, точка пересечения которых проходит через центр диска. Отверстия предназначены для фиксации тел на диске. Около каждого из них указано расстояние в миллиметрах от оси вращения.
14 Рис.1 и 2 имеют согласованную нумерацию элементов
97
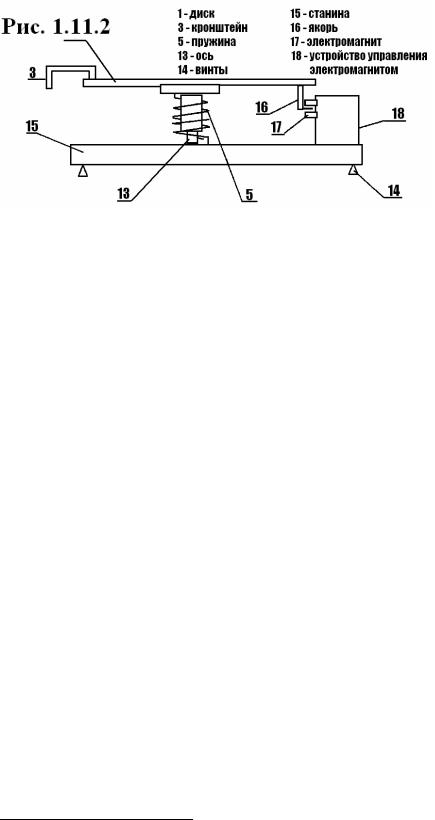
Для того чтобы колебания диска были незатухающими, установка снабжена электромагнитным приводом, смонтированным в устройстве управления диском 7. Основными элементами этого устройства являются якорь 16 и электромагнит 17. При вхождении якоря в зазор электромагнита устройство 18 включает электромагнит, и якорь втягивается в зазор. Скорость вращения диска немного увеличивается, чем компенсируются потери на трение. Когда якорь начинает выходить из зазора, электромагнит выключается. Индикатором включения электромагнита служит световой индикатор 8.
|
|
|
Для |
|
подсчета |
|
|
|
|
|
|||
|
|
|
|
|||
|
|
|
времени |
и |
количества |
|
|
|
|
полных |
|
колебаний, |
|
|
|
|
совершенных |
диском, |
в |
|
|
|
|
работе |
|
использована |
|
|
|
|
внешняя |
измерительная |
||
|
|
|
электронная |
система15. |
||
|
|
|
Связь |
|
установки |
|
|
|
|
крутильных |
|
колебаний |
с |
|
|
|
|
|||
|
|
|
|
|||
|
измерительной системой реализована с помощью кронштейна 3, который, |
пересекая окно |
||||
фотоэлектрического датчика 4 включает миллисекундомер 10. Кнопка «стоп» миллисекундомера позволяет прервать счет колебаний (количество полных колебаний высвечивается на индикаторе 11,
суммарное время – на индикаторе 12), |
и |
кнопка «сброс» |
обнуляет |
все показания |
миллисекундомера. |
|
|
|
|
К установке прилагается набор тел, |
момент |
инерции которых |
требуется |
определить, и |
эталонное тело, момент инерции которого известен относительно оси, проходящей через его центр масс.
Геометрические размеры тел в работе измеряют штангенциркулем, а их массу находят взвешиванием на лабораторных весах (если значения масс не приведены на лабораторном столе). Электропитание установки осуществляется постоянным напряжением 14…15 В от источника 6.
ТЕОРИЯ МЕТОДА
§ 1.11.1. Основные понятия
Понятия о колебательном процессе и гармонических колебаниях, моменте инерции и теореме Штейнера о переносе осей инерции, дифференциальном уравнении гармонических колебаний и его решении подробно изложены в разделе «Теоретические основы» работы № 1.3 настоящего практикума.
§ 1.11.1. Вывод рабочей формулы для определения момента инерции исследуемого тела
15 Использованы миллисекундомер и фотодатчик, аналогичные описанным в работе № 1.9 настоящего
практикума
98

 (
( (
(