

СхемаОпределения четности переносод
Чем
меньше А!, тем меньше разрядность конт-
Четность
переносов
Четность
слагаемых
И
Схема
проверки четностей по(12.8)
♦Ошибка
Рис.
12.2. Контроль сложения с использованием
проверок по четности
рольного кода и проще дополнительная аппаратура. Для двоичных чисел контроль по модулю возможен при 3, поэтому в ЭВМ часто используют контроль по модулю 3.
Покажем, что с помощью контроля по модулю 3 обнаруживаются любые одиночные ошибки. Одиночная ошибка в каком- либо разряде двоичного числа соответствует изменению числа на значение ±2\ Для обнаружения ошибки необходимо, чтобы контрольные коды чисел а и а±2* не совпадали, т. е.
R (а)ФЯ (a±2) = R (a)±R (2*),
или
Я(2*)#0.
Но 2‘ не делится на 3 без остатка, следовательно, требуемое условие выполняется. Кроме одиночных ошибок при контроле по модулю 3 обнаруживается часть двойных ошибок, а именно те ошибки, при которых правильные и ошибочные результаты имеют несовпадающие остатки от деления на 3.
На рис. 12.3 изображена структурная схема сумматора с контролем, по модулю R. Отметим, что контрольный блок значительно проще основного, при /? = 3 он содержит только два двоичных разряда. При реализации контроля важное значение имеет построение схем формирования остатков при минимальных затратах оборудования. Очевидно, что нахождение остатка путем прямого деления двоичного числа на 3 — путь неприемлемый. Однако кодирование по модулю 3 обладает свойствами, позволяющими строить достаточно простые комбинационные схемы формирования остатка по модулю 3.
Рис.
12.3. Структурная схема сумматора с
контролем по модулю R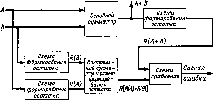
Может быть применен контроль по модулю с большим основанием, чем 3, например по модулю 7. При этом увеличивается число кратных ошибок, которые могут обнаруживаться системой контроля, однако возрастает сложность кодирующей и декодирующей аппаратуры.
Повышение степени интеграции и снижение стоимости (в пересчете на один вентиль) электронных схем сделали возможным практическое использование для контроля некоторых узлов, например сумматоров, самопроверяемого дублирования их схем, при котором'ошибки обнаруживаются по несовпадению сигналов на выходах дублированных схем. Этим способом обнаруживают ошибки любой кратности.
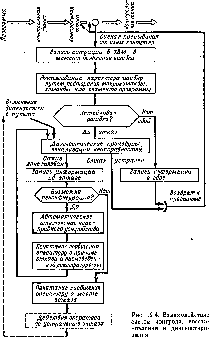
Взаимодействие систем автоматического контроля, восстановления вычислительного процесса и диагностирования
В ЭВМ, снабженной системой автоматического контроля, возникновение ошибок в каком-либо устройстве порождает сигнал ошибки, с появлением которого приостанавливается выполнение программы целиком или только рабочей процедуры в неисправном устройстве. При этом 1 в соответствующем разряде регистра ошибок, высвечиваемом на сигнальном табло на пульте оператора, указывает укрупненно место, где обнаружена ошибка (устройство, узел, регистр, группа разрядов регистра и т. д.). Сигнал ошибки инициирует работу системы восстановления.
Система автоматического восстановления во взаимодействии с системой автоматического контроля обычно выполняет следующие функции:
распознавание характера обнаруженной ошибки, т. е. выяснение, вызвана ошибка случайным сбоем, перемежающимся или устойчивым отказом;
организация «рестарта», т. е. продолжения выполнения программы путем устранения возникающей ошибки в информации повторением ошибочно выполненной микрооперации, команды или сегмента программы (при обнаружении, что ошибка вызвана сбоем);
запись в память информации о сбое;
инициирование (при обнаружении отказа) работы системы автоматического диагностирования (САД).
На САД в данном случае возлагается:
локализация места отказа с заданной степенью подробности, например до уровня сменной платы, и, если возможно, реконфигурация, т. е. отключение неисправного узла или
устройства с передачей его функции другому соответствующему узлу или устройству;
запись в память информации об отказе для последующей обработки.
Общая логика взаимодействия систем автоматического контроля, восстановления и диагностирования показана на рис. 12.4. Первой выполняется процедура обработки сигнала прерывания от системы контроля, начинающаяся записью состояний регистров процессора и старого слова состояния программы (ССП) в соответствующие ячейки памя-ги и выборкой нового ССП системы восстановления. Далее производится запись в специальные регистры или ячейки памяти ситуации в ЭВМ в момент обнаружения ошибки (записывается состояние запоминающих элементов и шин передачи данных неисправного устройства) !.
Для распознавания характера ошибки (сбой или отказ) необходимо повторить, может быть, даже несколько раз, операцию, в которой обнаружилась ошибка. Однако желательно это сделать с минимальными потерями времени. С этой точки зрения лучше всего, если процессор и система контроля выполнены таким образом, что проверяется правильность каждой микрооперации и вычислительный процесс останавливается на ошибочно выполнившейся микрооперации, которая может быть повторена. Микрооперация (команда) может быть повторена, если не исказилась используемая в операции информация (операнды, адреса и т. д.), т. е. если не пройден «порог повторения». Это проверяет входящая в систему программа обработки ошибок, которая по записанной ситуации, соответствующей появлению ошибки, определяет, пройден или нет порог повторения микрооперации или команды I. Если соответствующий порог пройден, то вместо микрооперации повторяется команда, а вместо команды — сегмент программы. Последнее возможно, если программист предусмотрел в программе «контрольные точки», сохраняющие промежуточные данные, позволяющие повторить программу с данного места.
Если при повторении микрокоманды (команды, сегмента, программы) ошибка не повторяется, событие распознается как сбой и происходит возврат к точке прерывания программы, но перед этим в память записывается дополнительная информация
о состоянии в момент сбоя вычислительной системы (какие в это время выполнялись операции в периферийных и других устройствах, название программы, адрес команды, операнды, время). Информация о ситуациях при сбоях и об отказах накапливается во внешнем ЗУ и в последующем обрабатывается специальной программой, вырабатывающей определеннее рекомендации обслуживающему персоналу, выполняющему профилактические работы.
Если при определенном числе повторений (например, восемь) ошибка сохраняется, событие распознается как отказ и автоматически приводится в действие САД для определения места неисправности. Диагностические процедуры также могут включаться вручную с пульта, например при пуске машины.
После выявления места отказа проверяется возможность реконфигурации путем автоматического отключения неисправного устройства и передачи его функций другому устройству. Если это возможно, то производится реконфигурация системы. Затем после сообщения оператору об отказе и произведенной реконфигурации происходит возврат к контрольной точке программы. Если реконфигурация невозможна, САД инициирует на пульте код * неисправности. Оператор, пользуясь справочником неисправностей, находит неисправный блок, ремонтирует или заменяет его, затем с пульта включает диагностические процедуры. Если отказ устранен, производится возврат к контрольной точке программы.
Принципы построения систем автоматического диагностирования ЭВМ
В техническом обслуживании ЭВМ наиболее сложной проблемой является поиск места (локализация) неисправности, вызвавшей отказ в работе машины. Поиск места неисправности вручную в таком сложном объекте, как современные ЭВМ, требует очень высокой квалификации обслуживающего персонала и больших затрат времени.
Для облегчения и ускорения поиска причины отказа ЭВМ снабжаются системами автоматического диагностирования неисправностей.
Диагностирование некоторого объекта может производиться функциональным или тестовым способом. Функциональное диагностирование предполагает контроль при помощи тех или иных средств контроля правильности функционирования объекта диагностирования при реализации его рабочего процесса. Тестовое диагностирование производится путем подачи на ди
агностируемый объект специальных тестовых воздействий и сравнения реакций объекта на эти воздействия с эталонными ответами.
Применяемые в ЭВМ средства автоматического контроля правильности функционирования помимо главной своей задачи — обнаружение ошибки в работе машины — позволяют диагностировать (локализовать) место неисправности, но с точностью лишь до устройства или крупного блока (например, модуля ОП, АЛУ и т. п.), т. е. с разрешающей способностью, которая для большинства ЭВМ оказывается недостаточной.
В ЭВМ используется главным образом метод тестового диагностирования, позволяющий локализовать место неисправности с достаточной разрешающей способностью.
Диагностические процедуры могут осуществляться путем пропуска на ЭВМ специальных диагностических программ. Однако несравненно более гибкое диагностирование с большей детализацией места неисправности (большей разрешающей способностью) обеспечивают диагностические процедуры, выполняемые под управлением специальных диагностических микротестов и микропрограмм («микропрограммное диагностирование», или, короче, «микродиагностика»).
В связи со сложностью аппаратуры диагностирование ЭВМ производится в форме многоэтапного процесса, причем на разных этапах используются различные средства САД — микропрограммные, программные, а также некоторые аппаратурные средства системы диагностирования.
Система автоматического диагностирования представляет собой комплекс аппаратурных, микропрограммных и программных средств и справочной документации (справочников неисправностей, инструкций, схем ЭВМ, тестов).
В зависимости от размещения аппаратурных средств системы диагностирования различают встроенные САД, когда диагностирующие средства размещаются внутри ЭВМ, и внешние САД, когда эти средства находятся вне машины. На практике часто САД строятся комбинированными: одна часть их средств встраивается в машину, а другая оформляется в виде специального дополнительного оборудования, подсоединяемого к ЭВМ при диагностировании неисправностей.
Обычно объем диагностических микропрограмм (тестов «микродиагностики») и программ столь велик, что их не удается хранить внутри ЭВМ (в УП, ОП или специальных встроенных памятях), но это в ряде случаев и не так важно, так как диагностические тесты не так часто выполняются. Поэтому обычно они хранятся во внешних ЗУ, в том числе в специальных внешних ЗУ САД.
Для САД современных средних и больших ЭВМ общего назначения характерным является наличие в их составе построенных на основе микропроцессоров или микро-ЭВМ специализированных диагностических процессоров (называемых сервисными адаптерами или сервисными процессорами), управляющих загрузкой в ЭВМ из внешних ЗУ («сервисных ЗУ») диагностической информаций, инициированием диагностических процедур, опросом состояния ЭВМ после подачи тестовых воздействий, сравнением полученных ответов с эталонными, индикацией и регистрацией результатов диагностирования.
При построении САД ЭВМ широкого назначения (например, в ЕС ЭВМ) используется диагностирование по методу «раскрутки». Метод «раскрутки» предполагает поэтапное последовательное расширение работоспособной части ЭВМ путем включения в эту часть оборудования, проверенного на предыдущем этапе.
На каждом i-м этапе диагностического процесса подмашина Aft, представляющая собой часть оборудования проверяемой ЭВМ, участвует в диагностировании аппаратуры ДМ;, которая, если в ней нет отказов, присоединяется к подмашине Aft-, образуя новую подмашину Afi+i=AfiUAAf/, выполняющую диагностическую процедуру на следующем этапе.
Подмашина Af0, с которой начинается «раскрутка», называется диагностическим ядром ЭВМ. Диагностическое ядро должно иметь повышенную надежность и допускать проверку работоспособности вручную или в полуавтоматическом режиме.
Системы автоматического диагностирования в машинах ЕС ЭВМ. В рассматриваемых САД реализовано микропрограммное диагностирование (микродиагностика).
Микропрограммное диагностирование в отличие от диагностирования программными средствами позволяет контролировать изменение состояния аппаратуры ЭВМ на каждом машинном такте, благодаря чему достигается высокая разрешающая способность САД — один-два сменных элемента (ТЭЗ). Однако при этом требуется дополнительная аппаратура (около 3—5 % объема оборудования процессора и каналов) и необходима разработка большого объема (около 1 Мбайт) микродиагностиче- ской информации (микротестов).
Средства САД и, в частности, микродиагностирование в некоторых моделях ЭВМ используются системой автоматизации профилактических испытаний, выполняемых при программноуправляемом изменении уровней питающих напряжений на ±5 % номинальных значений.
Системы диагностирования ЭВМ ЕС используют дополнительное внешнее оборудование — сервисный адаптер (сервисный процессор) с собственной небольшой оперативной памятью
Рис.
12.5. Система автоматического диагностирования
ЭВМ ЕС-1045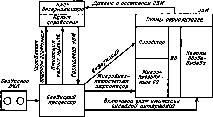
и сервисное кассетное ЗУЛ (пультовый накопитель). На рис. 12.5 показаны связи этих сервисных устройств с оборудованием ЭВМ в САД ЭВМ ЕС-1045. Микродиагностическая информация, а в ряде моделей ЕС ЭВМ и рабочие микропрограммы машины хранятся на кассетах сервисного ЗУЛ.
Управляющая память (УП) микропрограммного управляющего устройства процессора машины вся или частично является загружаемой.
Из сервисного ЗУЛ передаются в регистр микрокоманд УУ процессора микротесты, в загружаемую УП (или ее загружаемую секцию) — диагностические микропрограммы. Кроме того, из сервисного ЗУЛ производится также загрузка диагностических программ в ОП ЭВМ.
Сервисный процессор имеет собственную ориентированную на диагностические операции систему команд. Эти команды поступают в сервисный процессор с сервисного ЗУЛ и дешифрируются дешифратором диагностических операций сервисного процессора.
Данные о текущем состоянии машины, т. е. данные о состоянии ее регистров, счетчиков, управляющих триггеров, уровней сигналов на шинах (общий объем этих данных в ЭВМ ЕС составляет 3—4 тыс. бит), должны передаваться на пульт управления машины, а в режиме диагностирования — выборочно и в сервисный процессор для сравнения реакций аппаратуры на микротесты и диагностические микропрограммы с эталонными, содержащимися в микродиагностической информации.
Передача из машины на пульт управления и в сервисный
процессор указанного объема данных параллельным кодом практически невозможна, так как требует нескольких тысяч проводов. Поэтому эти данные подвергаются сериализации, другими словами, преобразованию объединенного параллельного кода состояния ЭВМ в последовательный. Этот последовательный код передается на пульт управления машины, там преобразуется в поток байт (десериализация) и отображается на индикаторах пульта, запоминается в памяти пульта, а нужные фрагменты данных о состоянии ЭВМ, адресуемые сервисным процессором, поступают в последний для сравнения с эталонными кодами. Сериализация данных о состоянии ЭВМ производится многоступенчатой схемой, построенной на мультиплексорах (см. гл. 3) [27].
В ЕС ЭВМ диагностирование машин производится по методу «раскрутки». Диагностическое ядро образуют сервисный процессор, сервисное ЗУЛ и часть аппаратуры пульта управления.
Диагностирование производится в несколько этапов. Можно выделить следующие укрупненные этапы: 1) статическое микродиагностирование; 2) динамическое микродиагностирование;
функциональное (программное) диагностирование.
Статическое микродиагностирование. Управление процессором машины берет на себя сервисный процессор. Производится загрузка из сервисного ЗУЛ регистра микрокоманд микротестом и инициируется выполнением микрооперации с заданным тестовым набором.
Одновременно из сервисного ЗУЛ поступают эталонный код и адрес (номер) байта в сериализованном потоке данных о состоянии ЭВМ, который следует сравнить с эталоном.
- В данном случае микродиагиостирование называется «статическим», так как проверяемая аппаратура работает не с рабочей тактовой частотой, а в темпе, определяемом загрузкой оборудования микротестами. На данном этапе проверяются аппаратура процессора, каналов, адаптера канал — канал, управление памятями, загружаемая УП, частично другие памяти.
Динамическое микродиагностирование производится при работе аппаратуры ЭВМ с рабочей тактовой частотой, что позволяет выявить неисправности, связанные с искажениями в реализации временных диаграмм. При этом используется проверенная на предыдущем этапе загружаемая УП, в которую с сервисного ЗУЛ загружаются диагностические микропрограммы, принимающие на себя управление ЭВМ. Сервисный процессор сравнивает результаты выполнения микропрограмм с эталонами. На этом этапе в динамическом режиме проверяется аппаратура ЭВМ, в том числе все ее памяти.
Функциональное (программное) диагностирование. Средствами функционального диагностирования служат проверенная на предыдущих этапах аппаратура машины и диагностические программы: 1) программа «базовый тест»; 2) программы тест- секций, выполняемые под управлением мониторной программы (диагностического монитора); 3) программы автономных диагностических тестов отдельных устройств. Базовый тест, загружаемый с сервисного ЗУЛ, проверяет выполнение группы команд процессора («ядро системы команд»), в том числе команд ввода-вывода, цепи связи с некоторыми периферийными устройствами.
Далее при помощи программ тест-секций производится диагностирование всех операций процессора, системы прерывания, защиты памяти, таймера, средств прямого управления, ОП, памяти ключей защиты, каналов ввода-вывода, периферийных устройств и их УПУ.
Если результат прохождения какого-либо теста оказывается неудачным, САД высвечивает на индикаторном табло пульта управления номер этого теста. Оператор, пользуясь справочником неисправностей, по номеру теста находит место неисправности. В такой форме система сообщает оператору о месте неисправности на всех этапах — от начала диагностического процесса до этапа проверки мультиплексного канала включительно. В последующих за этим этапах диагностики система выдает на печатающее устройство сообщение оператору о месте неисправности и указание, какая сменная плата (ТЭЗ) подлежит замене.
Более подробно вопросы автоматизации контроля и диагностирования ЭВМ рассмотрены в [27]. Там же изложены принципы построения таких средств повышения обслуживаемости ЭВМ, как системы автоматизации профилактических испытаний, сбора и обработки данных об отказах и сбоях, дистанционного обслуживания ЭВМ, а также особенности средств поддержки эксплуатационного обслуживания микропроцессорных устройств и персональных компьютеров.
Контрольные
вопросы
Перечислить основные характеристики надежности ЭВМ. Какие из этих характеристик являются специфичными для ЭВМ как универсального преобразователя информации? В чем различие между отказом и сбоем в работе ЭВМ?Обоснуйте, исходя из выражения (12.1), необходимый состав аппаратурно-программных средств, поддерживающих техническое обслуживание ЭВМ и способствующих повышению коэффициента использования ЭВМ и снижению расходов на эксплуатацию машины.Какой кратности ошибки (кроме одиночных) обнаруживает контроль по четности (нечетности)?Сколько нужно дополнительных (контрольных)разрядовдля реализации памяти с коррекцией одной ошибки с помощьюКодаХэммИй- га при длине информационного слова 16, 24, 32 разряда?Как в процессе взаимодействия систем контроля, восстановления вычислительного процесса и диагностирования определяется, является ошибка машины результатом отказа или сбоя? В чем различие функционирования этих систем в случае сбоя и отказа?