

МЕХ_МКТ_методичка
.pdf71
Рис. 8.1
Разобьем пластину на бесконечно узкие полоски шириной dx и
массой dm = m dS = m bdx = m dx каждая (рис. 8.1).
|
|
|
|
S |
ab |
a |
||
|
|
|
Момент инерции пластинки относительно оси z, лежащей в |
|||||
плоскости |
пластины |
и проходящей через ее центр масс равен |
||||||
I |
|
= x2dm = |
m |
a 2 |
x2dx = |
1 |
ma2 . |
|
z |
|
|
||||||
|
∫ |
|
a ∫−a 2 |
12 |
|
|||
|
|
|
|
|||||
В ряде случаев нахождение момента инерции значительно упрощается, если воспользоваться теоремой Штейнера: момент инерции тела относительно произвольной оси z равен моменту инерции относительно оси zC, параллельной данной и проходящей через центр масс тела, плюс произведение массы тела на квадрат расстояния a между осями:
Iz = IzC + ma2 .
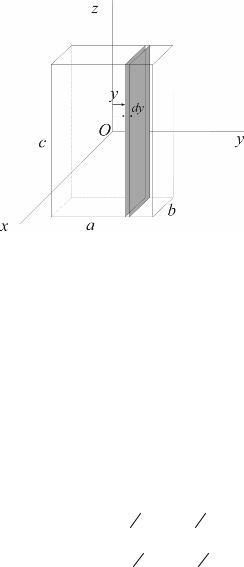
Найдем теперь момент инерции однородного прямоугольного параллелепипеда относительно оси z, проходящей через центр масс параллелепипеда (рис. 8.2):
72
Рис. 8.2
Для этого разобьем параллелепипед на бесконечно тонкие пластинки, параллельные плоскости zx, толщиной dy и массой
dm = |
m |
dV = |
m |
dy |
каждая. |
Согласно |
|
теореме |
|
Штейнера |
момент |
инерции |
|||||||||||||||||||||
|
|
|
|||||||||||||||||||||||||||||||
|
|
V |
|
|
a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
такой |
|
|
|
пластинки |
|
|
|
|
|
относительно |
|
|
оси |
z |
равен |
||||||||||||||||||
dI = |
1 |
dmb2 + y2 dm = |
1 |
|
mb2 |
|
dy + |
m |
y2 dy. |
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
12 |
|
|
|
|
|
|
12 |
|
|
a |
|
|
|
a |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
Для параллелепипеда, интегрируя, получаем |
|
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
mb2 |
a |
|
|
|
|
|
|
a |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
I |
|
= dI = |
1 |
|
2 |
dy + |
m |
|
2 |
y2 dy = |
1 |
mb2 + |
1 |
ma2 . |
|
|
|||||||||||||
|
|
|
|
z |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
∫ |
|
12 a |
∫ |
|
|
a |
|
∫ |
|
12 |
|
12 |
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
−a |
|
|
|
|
|
−a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
||
|
|
Таким образом, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
I z = |
m |
(a2 + b2 ). |
|
|
|
|
(8.1) |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
12 |
|
|
|
|
|
|
|
|
|
Аналогично можно показать, что моменты инерции параллелепипеда относительно осей x и y равны
I x |
= |
1 |
m (a2 + c2 ), |
(8.2) |
|
|
|
||||
|
12 |
|
|
||
I y |
= |
1 |
m (b2 + c2 ). |
(8.3) |
|
|
|||||
|
12 |
|
|
||
Мом
cosα , cos β , cos γ - направляющие косинусы.

73
Для момента инерции однородного прямоугольного параллелепипеда относительно оси АВ (диагональ параллелепипеда)
получаем:
Рис. 8.3
cosα = |
|
|
|
|
|
b |
|||||||
|
|
|
|
|
|
|
|
|
|
, |
|||
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
a2 |
+ b2 + c2 |
||||||
cos β = |
|
|
|
|
a |
||||||||
|
|
|
|
|
|
|
, |
||||||
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
a2 |
+ b2 + c2 |
||||||
cos γ = |
|
|
|
|
|
|
c |
||||||
|
|
|
|
. |
|||||||||
|
|
|
|
|
|
||||||||
|
|
|
|
a2 |
+ b2 + c2 |
||||||||
Тогда, подставляя (8.1 – 8.3), получаем
I AB = |
m a2b2 |
+ a2c2 + b2c2 |
(8.4) |
|||||||
|
|
|
|
|
|
|
|
. |
||
|
a |
2 |
+ b |
2 |
+ c |
2 |
||||
|
6 |
|
|
|
|
|
||||
Метод измерений. Вывод рабочей формулы
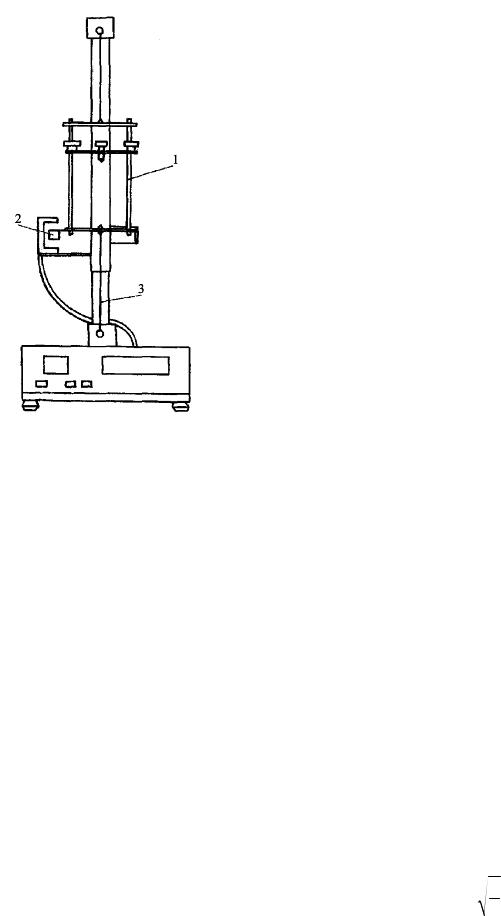
Для определения момента инерции тел используется крутильный маятник (рис. 8.4), основным элементом которого является рамка (1),
снабженная флажком (2) и подвешенная с помощью двух вертикально закреплённых проволок (3).
74
Рис. 8.4
Крутильные колебания представляют собой один из видов колебаний
упругих систем, при которых отдельные элементы системы (в данном случае – проволока) испытывают деформацию кручения.
Уравнение динамики вращательного движения твёрдого тела с моментом инерции I относительно фиксированной оси под действием момента упругих сил М можно записать в виде Iεz = Mz, где Mz = – kφ, φ
– угол поворота |
маятника, |
k |
– коэффициент крутильной жёсткости |
||||||||||
проволоки (другое название этой величины |
– модуль кручения). |
||||||||||||
|
|
|
Учитывая, |
что ε |
|
= |
d 2ϕ |
, |
получаем |
уравнение I |
d 2ϕ |
= −kϕ или |
|
|
|
z |
dt 2 |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
dt2 |
|||
|
d 2ϕ |
+ |
k |
ϕ = 0. |
|
|
|
|
|
|
|
|
|
|
dt 2 |
|
|
|
|
|
|
|
|
|
|
||
|
|
I |
|
|
|
|
|
|
|
|
|
||
Это уравнение гармонических колебаний с периодом T = 2π 
 I . k
I . k
75
Следовательно, определив экспериментально период колебаний Т,
можно найти момент инерции по формуле
I = |
k |
|
T 2 . |
|
(8.5) |
||
4p2 |
|
||||||
|
|
|
|
|
|
||
В настоящей работе определяется |
момент |
инерции рамки |
|||||
крутильного маятника по формуле |
|
|
|
|
|
|
|
I |
|
= |
k |
T 2 , |
|
(8.6) |
|
|
4π 2 |
|
|||||
|
0 |
|
0 |
|
|
||
где T0 – период колебаний рамки.
Также в работе определяется момент инерции Ii относительно разных
осей твёрдого тела, закреплённого в рамке крутильного маятника.
Суммарный момент |
инерции |
|
|
рамки и закрепленного тела равен |
||||||
I = Ii + I0 . Соответственно, |
период |
|
крутильных |
колебаний системы |
||||||
|
|
|
|
|
|
|
|
|
|
|
относительно i-й оси равен |
T = 2π |
I |
|
= 2π |
(Ii + I0 ) |
. |
Тогда, измерив период |
|||
|
|
|||||||||
|
i |
k |
|
|
|
k |
|
|||
|
|
|
|
|
|
|
||||
Ti , можно рассчитать момент инерции тела относительно i – ой оси по формуле
I |
|
= |
k |
T 2 |
- I |
|
= |
k |
(T 2 |
-T 2 ). |
(8.7) |
|
|
|
4π 2 |
||||||||
|
i |
|
4π 2 i |
|
0 |
|
i |
0 |
|
||
Согласно теории упругих деформаций для проволоки круглого сечения радиуса R и длины L коэффициент крутильной жесткости равен k = π R4G / 2L, где G – модуль сдвига материала.
Для крутильного маятника с двумя проволоками, используемого в работе, имеем
k = k1 + k2 |
= G πR |
4 |
|
1 |
+ |
1 |
|
(8.8) |
|
|
, |
||||||
|
|
|
||||||
|
2 |
|
l1 |
|
l2 |
|
||
где l1 |
и l2 |
– длины первой и второй проволок (значения указаны на |
установке), |
R – |
радиус проволок (значение указано на установке), G = |
8 ×1010 Н/м2 |
– модуль сдвига для стали. |
|
76
Порядок выполнения работы
1.Нажав кнопку «Сеть», включить установку. На лицевой панели миллисекундомера должны светиться цифровые индикаторы. Флажок рамки (позиция 2 на рис. 8.4) должен пересекать оптическую ось фотодатчика.
2.Измерить время n = 10 колебаний рамки. Для этого отклонить рамку рукой на угол 40 – 5 0 и отпустить. Нажать кнопку «СБРОС».
Дождаться появления на циферблате секундомера цифры «9» и нажать клавишу «СТОП». Секундомер остановится, отсчитав время t0 десяти
колебаний. Записать измеренное время в таблицу 8.1.
3.Повторить п. 2 пять раз.
|
|
|
|
|
|
Таблица 8.1 |
|
|
|
|
|
|
|
R = |
….. |
м |
|
|
|
|
l1 = …… |
м |
|
|
|
||
l2 = |
….. |
м |
|
|
|
|
|
№ |
|
t0, c |
n |
T0, c |
I0, кг·м2 |
|
1 |
|
|
|
|
|
|
2 |
|
|
|
|
|
|
3 |
|
|
|
|
|
|
4 |
|
|
|
|
|
|
5 |
|
|
|
|
|
4.Отключить прибор.
5.Установить в рамку маятника образец (параллелепипед). Для этого отвинтить гайки цанговых зажимов на подвижной рамке,
приподнять планку и осторожно вставить образец так, чтобы острия
рамки входили в углубления на образце по нужной оси (x, y, z или АB
(рис.8.3)).
6.Выполнить п.п. 2-3 для всех указанных осей (x, y, z, АB
(рис.8.3)). Результаты занести в таблицу 8.2.
Таблица 8.2

77
ось z
№ |
ti, c |
n |
Ti, c |
|
Ii, кг·м2 |
1 |
|
|
|
|
|
2 |
|
|
|
|
|
3 |
|
|
|
|
|
4 |
|
|
|
|
|
5 |
|
|
|
|
|
|
|
ось x |
|
|
|
№ |
ti, c |
n |
Ti, c |
|
Ii, кг·м2 |
1 |
|
|
|
|
|
2 |
|
|
|
|
|
3 |
|
|
|
|
|
4 |
|
|
|
|
|
5 |
|
|
|
|
|
|
|
ось y |
|
|
|
№ |
ti, c |
n |
Ti, c |
|
Ii, кг·м2 |
1 |
|
|
|
|
|
2 |
|
|
|
|
|
3 |
|
|
|
|
|
4 |
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
ось AB |
|
|
|
№ |
ti, c |
n |
Ti, c |
|
Ii, кг·м2 |
1 |
|
|
|
|
|
2 |
|
|
|
|
|
3 |
|
|
|
|
|
4 |
|
|
|
|
|
5 |
|
|
|
|
|
|
Обработка экспериментальных данных |
|
|||
1.По формуле (8.8) вычислить коэффициент крутильной жесткости k.
2.По данным таблицы 8.1 для каждого измерения вычислить
период колебаний T0 = t0 и момент инерции рамки I0 по формуле (8.6).
n
3.Усреднить значения I0 . Оценить погрешность определения I0
по разбросу значений и записать окончательный результат.
78
4. По данным таблицы 8.2 вычислить периоды колебаний T = |
ti |
|
|
i |
n |
|
|
относительно различных осей. |
|
5.Вычислить по формуле (8.7) моменты инерции образца Ii
относительно осей x, y, z и AB. Для каждой из осей усреднить полученные значения Ii, оценить погрешность по разбросу значений и записать окончательный результат.
6. Провести оценочные расчёты моментов инерции Ii выбранного образца (параллелепипеда) без учёта скоса вершин относительно осей x, y, z и AB по формулам (8.1 – 8.4). При расчетах использовать следующие данные:
a= b = 0.05 м, c = 0.1 м, m = 1.94 кг.
7.Сравнить результаты п. 4 с опытными данными (результатами п.
3).
Контрольные вопросы
1.Уравнение динамики вращательного движения твёрдого тела относительно неподвижной оси.
2.Что называется моментом инерции твёрдого тела?
3.Выведите формулу для момента инерции однородного прямоугольного параллелепипеда относительно оси x (рис. 8.3).
4.Сформулируйте теорему Штейнера.
Литература: [1, § 13, 27, 28, 31, 32]; [2, § 33-36, 46, 79]; [4, § 4.1-4.3
]; [5].
79
Лабораторная работа №9
ОПРЕДЕЛЕНИЕ МОДУЛЯ КРУЧЕНИЯ НИТИ И МОМЕНТА ИНЕРЦИИ СИСТЕМЫ, СОВЕРШАЮЩЕЙ КРУТИЛЬНЫЕ
КОЛЕБАНИЯ
Цель работы – определение момента инерции крутильного маятника и модуля кручения нити по результатам исследования неупругого соударения математического и крутильного маятников.
Приборы и принадлежности: крутильный маятник, математический маятник, секундомер.
Краткие сведения из теории
Крутильным маятником называется твёрдое тело, подвешенное на упругой нити, которое может совершать колебания вращательного
характера под воздействием момента упругих сил, возникающих в нити.
В работе используется маятник с большим периодом собственных
колебаний T0.
Предположим, что под кратковременным воздействием внешней силы (tдейств<< T0) маятник выведен из положения равновесия. Нить, на которой подвешен маятник, закрутится. Пи этом возникнет момент
упругих сил, возвращающих маятник в начальное положение:
Мкр= – kϕ, |
(9.1) |
где ϕ – угол закручивания нити; k – |
модуль кручения нити, численно |
равный величине крутящего момента относительно оси вращения,
приходящегося на единичный угол закручивания (в литературе можно встретить другое название этой величины – крутильная жесткость нити).
Знак « – » говорит о том, что направление крутящегося момента сил упругости противоположно направлению угла закручивания.
80
Тогда уравнение вращательного движения маятника относительно неподвижной оси ОО1 (рис 9.2) с учётом (9.1) можно записать
I × |
d 2ϕ |
= -kϕ , |
(9.2) |
|
||
dt 2 |
|
|||||
|
|
|
|
|
||
где I – момент инерции маятника относительно оси вращения; |
d 2ϕ |
– |
||||
dt 2 |
||||||
|
|
|
|
|
||
угловое ускорение вращательного движения относительно оси вращения;
Уравнение (9.2) справедливо для углов α < 30°, когда sin ϕ ≈ ϕ .
Если обозначить |
|
|
ω2 |
=k/I, |
(9.3) |
0 |
|
|
то уравнение движения крутильного маятника (9.2) можно переписать так: d 2ϕ / dt 2 + ω02ϕ = 0 . Решение данного дифференциального уравнения ищем в
виде ϕ = ϕ0 cos(ω0t +α ) , где ϕ0 – амплитудное значение угла закручивания;
α – начальная фаза колебаний, w0 – циклическая частота собственных
колебаний маятника.
Циклическая частота связана с периодом свободных колебаний
маятника T0 |
формулой ω0 = 2π / T0 , тогда с учётом (9.3) |
модуль кручения |
||||||
нити можно выразить |
|
|
|
|
||||
|
|
|
k = |
4π 2 I |
|
(9.4) |
|
|
|
|
|
||||||
|
|
|
|
T 2 |
|
|
|
|
|
0 |
|
|
|
|
|||
Принимая во внимание, что угловая скорость вращательного |
||||||||
движения |
ω = |
dϕ |
, получаем |
|
ω = -ϕ0ω0 sin(ω0t + α ) . |
Очевидно, что |
||
|
|
|||||||
|
|
dt |
|
|
|
|
||
максимальное значение угловой скорости вращения маятника равно |
||||||||
|
|
|
ωmax = -ϕ0ω0 = 2πϕ0 / T0 . |
(9.5) |
|
|||
В качестве тела, воздействующего на исследуемый крутильный |
||||||||
маятник, можно использовать |
математический |
маятник – массивный |
||||||
шарик, подвешенный на лёгком, нерастяжимом стержне длиной l (при этом rш<<l, mш>> mподвеса).