

МЕХ_МКТ_методичка
.pdf31
Конкретные задания
1.Определить коэффициент трения качения.
2.Оценить погрешность полученного значения.
Порядок выполнения работы
1.Наклонить колонку 8 прибора (см. рис. 2.2) на угол β = 30°.
2.Отклонить шар от положения равновесия на угол α0 = 5° и
отпустить. Шар начнёт совершать колебания.
3.Считать угол αn отклонения шарика после пяти полных колебаний. Результаты занести в таблицу 2.1.
4.Повторить действия п.п. 2,3 ещё четыре раза.
5.Выполнить измерения для углов β = 45°, 60°, повторяя действия
п.п. 2-4.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 2.1 |
|||||
Радиус шарика R = …. |
мм |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Число полных колебаний шарика п = 5 |
|
|
|
|
|
|
|
|
|
|
||||||||||
Угол начального отклонения шарика α0 = 5° |
|
|
|
|
|
|
|
|||||||||||||
|
Угол, считанный после п - |
|
|
|
|
|
|
|
|
|
|
|
||||||||
Угол |
|
полных колебаний |
|
|
|
Коэффициент трения |
|
|
|
|
||||||||||
|
|
|
|
kmp |
||||||||||||||||
наклона |
|
|
шарика, |
|
|
|
|
|
|
качения kтр |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
маятника |
|
|
αn, дел* |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
β, град |
1 |
|
2 |
|
3 |
|
4 |
|
5 |
|
1 |
|
2 |
3 |
4 |
|
5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
30º |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
45° |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
60° |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
*При подстановке в расчётную формулу деления следует перевести
врадианы (см. инструкцию на установке).
Обработка и анализ результатов измерений
32
1.Вычислить коэффициент трения качения для каждого значения угла αn по формуле (2.1). Результаты вычислений занести в таблицу 2.1.
2.Оценить погрешность определения коэффициента трения качения по данным табл. 2.1, применяя погрешность прямых измерений.
Контрольные вопросы
1.Каковы физические причины трения?
2.Какие виды трения существуют и чем они отличаются?
3.Объяснить природу потерь кинетической энергии телом при
качении.
Литература: [1, § 7, 11, 12, 14]; [2, § 11]; [4, § 2.2-2.4, ]; [5].
33
Лабораторная работа № 3
ИЗУЧЕНИЕ РАВНОУСКОРЕННОГО ДВИЖЕНИЯ НА МАШИНЕ АТВУДА
Цель работы – изучение равноускоренного движения системы тел и определение ускорения свободного падения.
Приборы и принадлежности: в работе используются лабораторная установка "машина Атвуда" и электронный секундомер для измерения
времени.
Краткие сведения из теории
r |
R |
r |
|
||
T1′ |
|
T2′ |
r |
|
r |
T1 |
|
T2 |
r |
|
r |
m1g |
|
m2 g |
Рис. 3.1
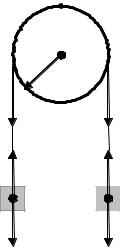
Рассмотрим движение системы двух тел (т1 и т2), соединенных нитью, проходящей через блок массой тб и радиусом R (рис.3.1). Если предположить, что трение на оси блока отсутствует, а также пренебречь весом нити и силой сопротивления воздуха, то эта задача представляет собой идеализацию реальной экспериментальной установки данной работы.
34
Для нахождения ускорения движения тел напишем законы поступательного движения тел и вращательного движения блока и решим их:
а) II закон Ньютона для правого тела
m1a = m1 g − T1 ;
б) II закон Ньютона для левого тела
m2 a = T2 − m2 g ;
в) закон динамики вращения блока
Iε = T1 R − T2 R
Здесь I = m R2 |
2 – момент инерции блока, ε – угловое ускорение |
б |
|
вращения блока, связанное с ускорением движущихся грузов (при условии,
что нить в блоке не проскальзывает) |
соотношением ε = a R , а T1R − T2 R - |
||||
момент сил, действующих на блок. |
|
|
|
||
Решая совместно данную систему уравнений движения, получаем |
|||||
a = |
|
m1 − m2 |
|
g . |
(3.1) |
|
|
|
|||
|
m1 |
+ m2 + 0,5mб |
|
||
Таким образом, грузы должны двигаться с постоянным ускорением.
Известно, что при равноускоренном движении с нулевой начальной скоростью путь, пройденный телом по истечении времени t от начала движения, выражается формулой
S = at 2 2 . |
(3.2) |
Описанная ниже экспериментальная установка позволяет измерять время прохождения системой тел различных фиксированных расстояний.
По этим данным можно определить величину ускорения грузов.
Сначала следует убедиться в том, что движение имеет действительно равноускоренный характер. Предположим, что измерены время t1, t2, t3, …
прохождения системой тел расстояний S1, S2, S3, … Полученные данные нужно представить на графике в виде зависимости 2S(t2).
Если точки на графике достаточно хорошо укладываются на прямую линию, то это говорит о том, что ускорение движения в соответствии с

35
формулой (3.1) имеет постоянную величину. По углу наклона прямой линии можно найти величину ускорения а.
Располагая таким методом определения величины ускорения и изменяя в опытах величину перегрузки, можно исследовать зависимость ускорения тел от действующей на них силы. Изменяя массу тел, можно исследовать зависимость ускорения от массы тел.
Описание экспериментальной установки
1
3
4(II)
6
5 4(I)
2
7
Рис. 3.2
Общий вид прибора "машина Атвуда" приведен на рис.3.2. В
верхней части вертикальной шкалы 3 укреплен на подшипнике легкий блок 1, который с достаточно малым трением может вращаться вокруг своей оси. Через блок проходит нить, к концам которой прикреплены грузы 4, движение которых и будет изучаться. Электромагнит,
расположенный на одной оси с блоком, служит для пуска и остановки движения грузов. Действие устройства основано на том, что нить,
соединяющая грузы, проходит в зазоре между якорем и сердечником электромагнита, и при замыкании и размыкании электрической цепи электронного секундомера 5 и электромагнита, нажатием кнопок «Пуск»
36
(«Сброс»), соответственно, нить освобождается (зажимается) и блок 1
начинает (прекращает) движение.
Фотоэлемент 2 (рис.3.2) предназначен для разрыва электрической цепи секундомера, и, следовательно, прекращения отсчета времени в тот момент, когда груз I начнёт проходить мимо него. Ограничитель 6
используется для облегчения начальной установки грузов. В лабораторной работе также применяется набор перегрузков массой 10, 20 и 50 г.
Конкретные задачи
1.Определить ускорение движения системы тел. Убедиться, что движение является равноускоренным.
2.Исследовать зависимость ускорения системы от массы движущихся тел.
3.Исследовать зависимость ускорения системы от действующей на грузы силы.
4.Сделать вывод о соответствии полученных результатов законам
динамики.
Порядок выполнения работы
1. Включить приборы в сеть. Установить груз I на столик 7 (рис. 3.2). По вертикальной шкале 3, снять начальную координату l' нижнего торца груза II, записать полученный результат. Снять нить с блока и установить на грузы I и II дополнительные грузы так, чтобы суммарная масса грузов стала равна 100 г и 70 г соответственно (с учётом начальной массы). Установить ограничитель 6 горизонтальным участком на отметке l1 = 35 см. Поместить систему грузов на блок так, чтобы груз II нижним торцом касался ограничителя. Придерживая его в таком положении,
37
включить секундомер (на задней панели электронного блока), нить
зафиксируется. Установка готова к работе.
2. Нажать кнопку «Пуск» электронного секундомера, при этом грузы придут в движение, и одновременно начнется отсчет времени. При прохождении груза I мимо фотоэлемента секундомер остановится.
Записать показание секундомера в табл. 3.1.
3. Опустить груз II на ограничитель, придерживая его, нажать кнопки «Стоп» и «Сброс» (обращайте внимание на то, чтобы груз I не
раскачивался). Записать показания секундомера. Выполнить аналогичные измерения ещё два раза. Результаты занести в таблицу 3.1, в колонку,
соответствующую S1, где S1 = l1 – l' – 4,2, см (грузы I и II проходят равные расстояния l1 – l', однако, секундомер фиксирует время, за которое груз I
проходит расстояние на 4,2 см меньше с учётом расстояния от столика 7 до датчика фотоэлемента 2).
|
l' = |
…….., |
см |
т1 = 100 г |
т2 = 70 г |
|
|
Таблица 3.1. |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
№ |
S1 = |
, см |
S2 = |
, см |
S3 = |
, см |
S4 = |
, см |
||||||||||||||
п/п |
|
|
t1, с |
|
|
t2, с |
|
|
t3, с |
|
|
t4, с |
||||||||||
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
t1 ср = |
|
|
|
c, |
t2 ср = |
|
|
c, |
t3 ср = |
|
|
|
c, |
t4 ср = |
|
|
c, |
||||
|
t 2 |
= |
|
|
с2 |
t 2 |
= |
|
с2 |
t 2 |
= |
|
|
с2 |
t 2 |
= |
|
с2 |
||||
|
1cp |
|
|
|
|
|
2cp |
|
|
|
|
3cp |
|
|
|
|
|
4cp |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
4.Перемещая ограничитель, провести аналогичные операция для li
=30, 25 и 20 см, заполнив табл. 3.1, где Si = li – l' – 4,2, см. Эти данные позволят определить величину ускорения а для данной массы грузов, а
также сделать вывод о характере их движения.
5.Установить ограничитель на отметке l = 35 см.
6.Снять нить с блока и установить дополнительные грузы так,
чтобы суммарная масса I и II грузов были равны 60 и 50 г соответственно.
38
7.Измерить время движения грузов 5 раз. Результаты занести в таблицу 3.2.
8.Провести серию измерений, повторив п.п. 5, 6, когда массы грузов составляют 70 и 60, 80 и 70, 90 и 80, 100 и 90 г. Результаты занести
втаблицу 3.2.
|
S = l – l' – 4,2 = 20,8 – l' = ………., |
см |
Таблица 3.2 |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
№ |
т1, |
т2, |
|
ti, мс |
ti ср, |
|
ti2 ср, |
а, |
т1 + т2, |
||||
п/п |
г |
г |
|
мс |
|
мс2 |
м/с2 |
г |
|||||
1 |
60 |
50 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
70 |
60 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
80 |
70 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
90 |
80 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5 |
100 |
90 |
|
|
|
|
|
|
|
|
|
|
|
|
9. |
Изменяя |
величину |
перегрузки, |
исследовать зависимость |
||||||||
ускорения системы от действующей на грузы силы. Для этого проделать аналогичные испытания, когда массы грузов составляют 120 и 50, 110 и 60, 100 и 70, 90 и 80 г. Высоту, на которой находится ограничитель
оставить прежней. Результаты занести в таблицу 3.3. |
|
|||||||||||||
|
S = l – |
l' – 4,2 = 20,8 – l' = ……… |
|
, см |
Таблица 3.3 |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
№ |
т1, |
|
т2, |
|
ti, мс |
|
ti ср, |
|
ti2 ср, |
а, |
т1 – т2, |
|||
п/п |
г |
|
г |
|
|
мс |
|
мс2 |
м/с2 |
г |
||||
1 |
120 |
|
50 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
110 |
|
60 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
100 |
|
70 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
90 |
|
80 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Обработка и анализ результатов измерений
1.По данным таблицы 3.1 рассчитать среднее время ti ср
прохождения системой расстояния Si, а также квадрат этого времени.
39
2. Результаты измерений из таблицы 3.1 представить на графике в виде зависимости 2S( tcp2 ). Провести прямую линию, наилучшим образом соответствующую всем экспериментальным точкам. Убедиться в том, что указанная зависимость близка к линейной. Тангенс угла наклона,
полученной прямой к оси абсцисс (что следует из формулы (3.2)), и равен ускорению системы грузов. Найти это ускорение. Соответствуют ли полученная величина ускорения законам динамики? Сделать вывод о характере движения грузов. Оценить погрешность найденного значения ускорения по разбросу точек на графике.
3.Заполнить таблицы 3.2 и 3.3, рассчитав среднее время движения грузов, а также их ускорения для каждой пары по формуле (3.2).
4.Представить на графике зависимости ускорения системы грузов от их суммарной массы а = f (т1 + т2) и от массы перегрузки а = f (т1 –
т2). Сделать вывод о влиянии массы грузов и сил, действующих на них на ускорение системы.
5. Найти абсолютную и относительную погрешности ускорения системы для любой пары грузов, применяя метод расчёта погрешности косвенных измерений.
Контрольные вопросы и задания
1.Закономерности кинематики равноускоренного движения.
Представьте их в графическом виде а(t), υ(t), S(t).
2.Законы динамики Ньютона.
3.Закон динамики вращательного движения твёрдого тела относительно неподвижной оси.
Литература: [1, § 7, 8, 10-13]; [2, § 11,12]; [4, § 1.3, 1.4, 2.2-2.4, ]; [5].
40
Лабораторная работа №4
ИССЛЕДОВАНИЕ ЗАКОНОВ ДИНАМИКИ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ ТВЕРДОГО ТЕЛА
Цель работы − экспериментальная проверка основного закона динамики вращательного движения твердого тела и определение момента инерции тела.
Приборы и принадлежности: маятник Обербека FPM-06; комплект четырех подвижных грузов массы т; комплект четырех грузов одинаковой массы m1, укрепляемых на маятнике (значения масс m и m1 указаны на грузах); блок миллисекундомера FPM-15 (с относительной погрешностью измерения времени 0,02%); миллиметровая шкала (погрешность определения пути грузов ±1мм).
Краткие сведения из теории
Основной закон вращательного движения твердого тела описывается
|
|
dL |
= |
r |
r |
|
|
|
|
уравнением |
|
M , |
где L |
− |
момент импульса |
тела |
относительно |
||
|
|
||||||||
|
|
dt |
|
|
|
|
|
|
|
|
|
|
|
r |
r |
|
|
|
|
некоторой |
точки, |
M |
= ∑ M k |
− |
суммарный момент |
всех |
внешних сил, |
||
|
|
|
|
|
k |
|
|
|
|
действующих на тело, относительно этой же точки. При вращении относительно неподвижной оси z основной закон вращательного движения
принимает вид: |
dLz |
= M |
|
, |
где L и M |
z |
− проекции момента импульса и |
||
|
z |
||||||||
|
dt |
|
z |
|
|
|
|||
|
|
|
|
|
|
|
|
||
равнодействующей силы на ось z. |
|
|
|
|
|||||
Учитывая, что Lz = |
Iω, где I − |
момент инерции тела относительно |
|||||||
этой оси, ω − угловая |
скорость вращения тела и |
dω |
= ε − угловое |
||||||
|
|||||||||
|
|
|
|
|
|
|
|
dt |
|
ускорение, получаем основной закон динамики вращательного движения относительно неподвижной оси в виде: