

§ 1.4. Другие типы звеньев
Как уже говорилось, в общем случае передаточная функция звена имеет вид
![]()
где N(s) и L(s)—многочлены с коэффициентами 1 при младших членах. Выше были рассмотрены наиболее часто встречающиеся на практике основные тины звеньев. Все они характеризуются отсутствием корней с положительной вещественной частью как в числителе N(s) (т. е. нулей передаточной функции), так и в знаменателе L(s) (т. е. полюсов). Все звенья, обладающие этим свойством, называются минимально-фазовыми. Смысл такого названия выяснится ниже.
Неминимально-фазовые звенья. В отличие от рассмотренных выше, любое звено, передаточная функция которого имеет хотя бы один корень числителя N(s) или знаменателя L(s) с положительной вещественной частью, называется неминимально-фазовым звеном. Приведем пример такой передаточной функции
![]()
Здесь имеется положительный полюс (корень знаменателя)
![]()
Частотные характеристики такого звена:

в то время как для обычного апериодического звена имеем
![]()
Разница между ними, как видим, в величине фазы. Амплитудные же характеристики одинаковы. Оказывается, что из всех возможных звеньев с одинаковыми амплитудными характеристиками обычные типовые звенья обладают наименьшими но абсолютному значению фазовыми характеристиками. В этом и состоит смысл введенных терминов.
Важным свойством минимально-фазовых звеньев является однозначное соответствие амплитудной и фазовой частотных характеристик. Другими словами, по заданной амплитудной характеристике всегда можно определить фазовую и наоборот. То же самое свойство относится и

к вещественной U1(ω) и мнимой V(ω) частям амплитудно-фазовой частотной характеристики минимально-фазовых звеньев.
Заметим, что, в частности, для данного неминимально-фазового звена (1.18) переходная функция будет расходящейся (рис. 1.43, а), вместо обычной затухающей (рис. 1.43, б).
Звенья с модулированным сигналом (на несущей переменного тока). Звено с модулированным сигналом отличается тем, что сигнал, характеризующий передачу
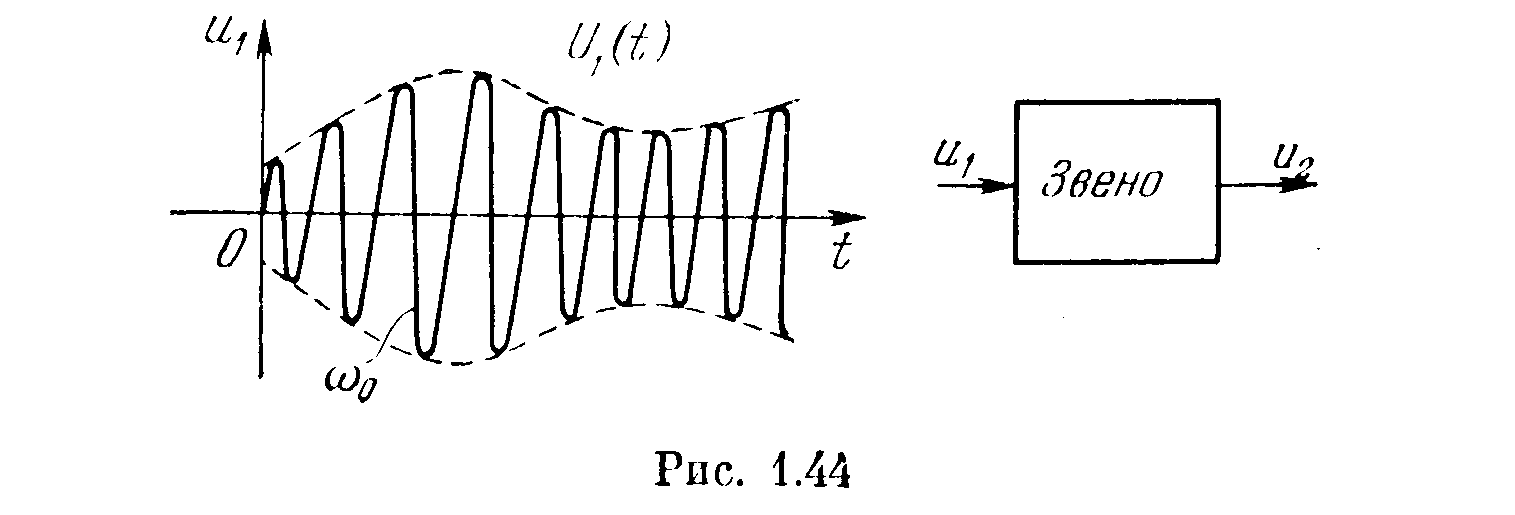
воздействия в цепи регулирования U1(t), является огибающей несущих колебаний и1(t), имеющих заданную сравнительно высокую частоту ω0 (рис. 1.44). Такой вид имеет, например, передача сигналов в цепях на переменном токе.
Для получения частотной характеристики такого звена нужно выходной сигнал U1(t) изменять по синусоидальному закону с некоторой частотой Ω и с единичной амплитудой. Тогда входная величина будет

Соответственно па выходе получим зависимость амплитуды А сигнала U2 от частоты, различную при разных передаточных функциях. Например, чтобы получить

аналог обычного апериодического звена (рис. 1.45), нужно схему звена на переменном токе составить так, чтобы его амплитудная частотная характеристика имела вид, показанный на рис. 1.46, где обозначено
![]()
Такой подход является основой для получения аналогов различных типов звеньев на переменном токе [I].
Глава 2. Основные характеристики систем автоматического управления
§ 2.1. Передаточные функции и характеристики разомкнутой цепи звеньев
Изучаемые здесь системы автоматического управления и регулирования являются замкнутыми системами. Но при их проектировании часто предварительно рассматривается разомкнутая цепь звеньев, которая затем

замыкается. Составим сначала передаточные функции разомкнутой цепи звеньев.