

Е.П. Попов
Теория линейных систем автоматического регулирования и управления
Оглавление
Введение 3
Глава 1. Основные характеристики звеньев автоматических систем 8
§ 1.1 Уравнения звеньев и виды основных характеристик 8
§ 1.2 Типы позиционных звеньев и их характеристики 14
§ 1.3 Типы интегрирующих и дифференцирующих звеньев и их
характеристики 20
§ 1.4 Другие типы звеньев 24
Глава 2. Основные характеристики систем автоматического
управления 26
§ 2.1 Передаточные функции и характеристики разомкнутой цепи звеньев 26
§ 2.2 Структурные преобразования 29
§ 2.3 Передаточные функции и уравнения замкнутой системы 32
§ 2.4 Частотные характеристики замкнутой системы 35
Глава 3. Точность и чувствительность систем автоматического
управления 39
§ 3.1 Процесс управления и требования к нему 39
§ 3.2 Постоянные ошибки. Астатические ошибки 41
§ 3.3 Точность при гармонических воздействиях 44
§ 3.4 Установившаяся ошибка при произвольном воздействии
(коэффициенты ошибок) 46
§ 3.5 Чувствительность автоматических систем 48
Глава 4. Устойчивость систем автоматического управления 52
§ 4.1 Понятие устойчивости линеаризованных систем 52
§ 4.2 Алгебраические критерии устойчивости 55
§ 4.3 Критерий устойчивости Михайлова. Построение областей
устойчивости 58
§ 4.4 Частотный критерий устойчивости Найквиста 62
Глава 5. Оценки качества переходного процесса 68
§ 5.1 Требования качества и связь с частотными характеристиками 68
§ 5.2 Частотные оценки качества 70
§ 5.3 Корневые оценки качества 73
§ 5.4 Интегральные оценки качества 77
Глава 6. Корректирующие устройства и методы их синтеза 80
§ 6.1 Последовательные корректирующие устройства 80
§ 6.2 Параллельные корректирующие устройства 83
§ 6.3 Корректирующие устройства по внешнему воздействию.
Инвариантность 85
§ 6.4 Частотный метод синтеза корректирующих устройств 87
§ 6.5 Метод корневого годографа 92
Список литературы 98
Введение
Теория автоматического управления и регулирования — наука, которая изучает процессы управления, методы их исследования и основы проектирования автоматических систем, работающих по замкнутому циклу, в любой области техники. Иначе говоря, она изучает процессы управления и задачи создания любых систем с обратной связью. Термин «управление» является более общим, чем «регулирование», что видно из дальнейшего.
Все системы управления делятся на разомкнутые и замкнутые.
На рис. B.1 изображена функциональная схема разомкнутой системы. Источником воздействия может быть
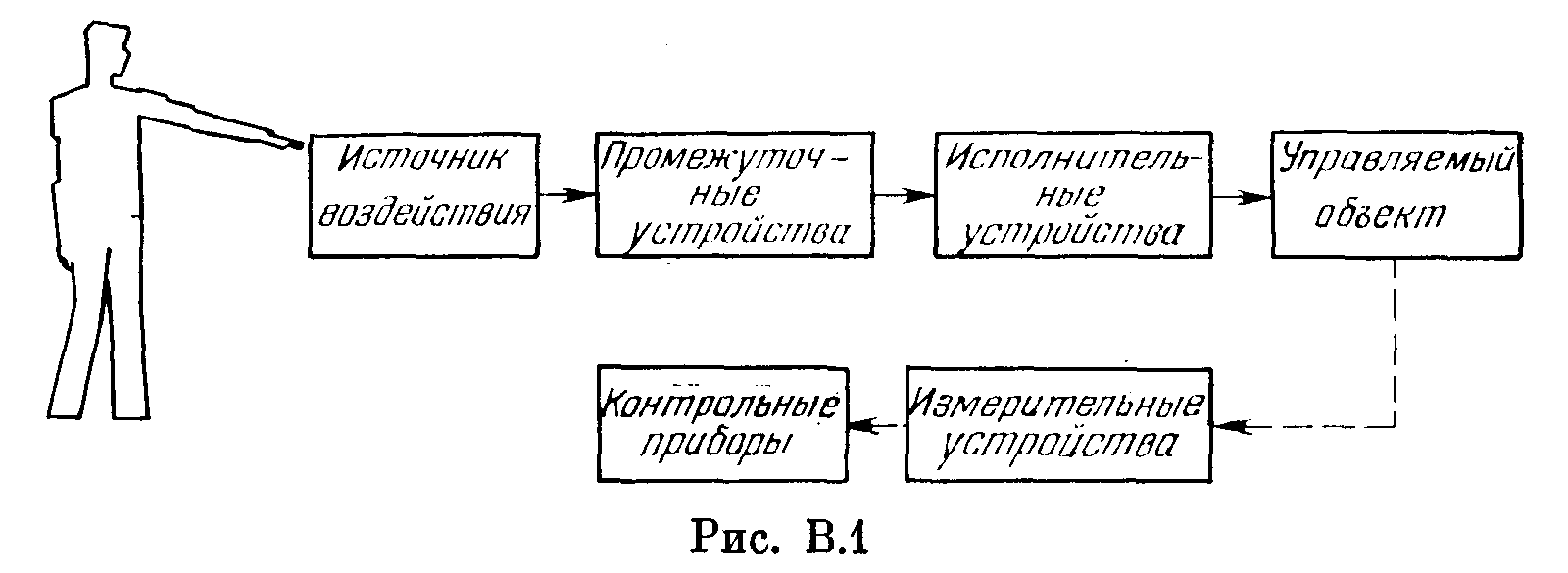
либо человек, либо автоматически действующее устройство (например, фотоэлемент в системе автоматической охраны или в системе автоматического включения освещения). По разомкнутому принципу работают многие известные всем автоматы. Примером такой системы с человеком может служить также система управления полетом самолета летчиком, когда управляемым объектом является самолет или его двигатель.
На рис. В. 2 приведена примерная функциональная схема замкнутой автоматической системы (системы управления с обратной связью).
Обратная связь, замыкающая систему, передает результат измерения выходной величины на вход системы. Эта выходная величина представляет собой физический параметр, подлежащий регулированию (х — регулируемая или управляемая величина).
Входные величины g(t) и f(t) являются соответственно задающим и возмущающим воздействиями. Задача системы состоит в том, чтобы возможно точнее воспроизводить на выходе х задаваемый закон изменения g(t)
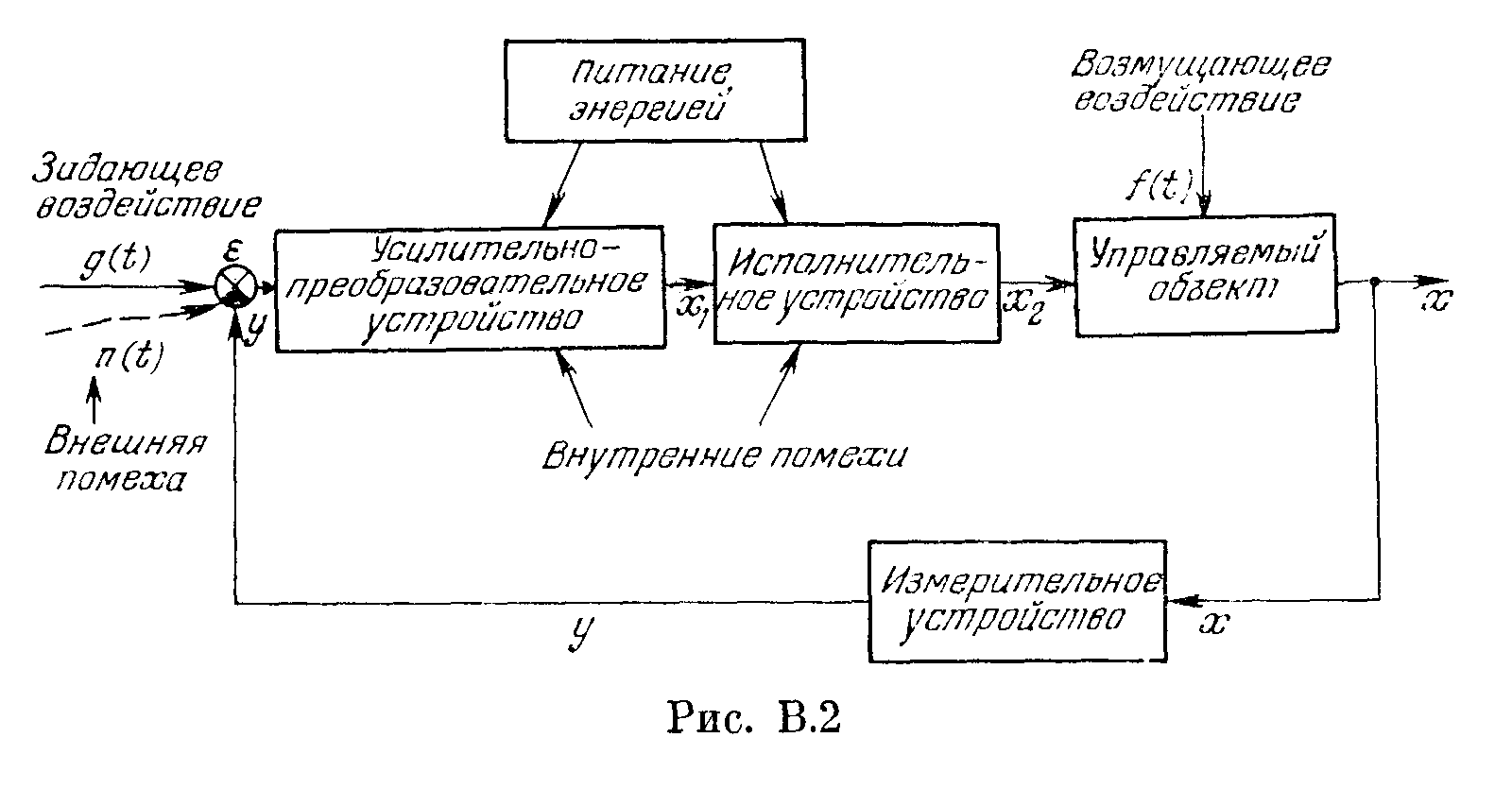
и возможно полнее подавлять влияние возмущающего воздействия f(t), а также других внешних и внутренних помех, если они имеются. Для этой цели выходная величина х сравнивается через измеритель у = kx с входной величиной g(t). Получается рассогласование (ошибка)
![]()
Рассогласование ε служит источником воздействия на систему, причем система работает на уничтожение или сведение к допустимому малому значению величины этого рассогласования (т. е. величины ошибки системы ε).
В общем случае задающее воздействие g(t) может меняться произвольно.
Случаю g(t)=const соответствует собственно автоматическое регулирование на поддержание постоянного значения регулируемой величины (например, скорости вращения вала двигателя, температуры в некоторой камере, напряжения на клеммах генератора и т. п.). Это типичная система регулирования по заданной настройке регулятора.
Такие системы (g = const) называют также системами стабилизации (например, стабилизация крена самолета, углового положения гироплатформы и т. п.).
Если
g(t)
заранее задано во времени (например,
g=ct),
то заданный закон e(t)
называется программой управления. При
таком программном
автоматическом управлении
выходная величина х
должна следовать заданному закону
изменения во времени. Примером может
служить программа задания угла наклона
продольной оси ракеты-носителя υ (при
запуске спутника), начиная от в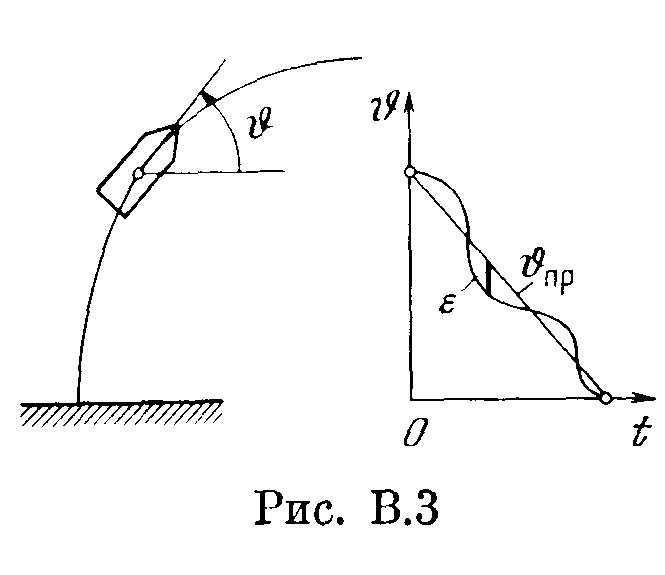 ертикального
положения на старте до горизонтального
положения при выходе на круговую орбиту
(рис. В.З).
ертикального
положения на старте до горизонтального
положения при выходе на круговую орбиту
(рис. В.З).
Рассогласование (ошибка управления, рис. В.З) будет
![]()
Оно
служит управляющим сигналом для
автоматического выдерживания задаваемого
закона
![]() (t).
(t).
К системам автоматического управления, работающим по замкнутому циклу, относятся также следящие системы. Пример показан на рис. В.4. В этом случае угол поворота выходного вала следящей системы β(t) должен следовать произвольно задаваемому повороту входного вала α(t) с наименьшей ошибкой ε, причем
![]()
а управляющее воздействие
![]()
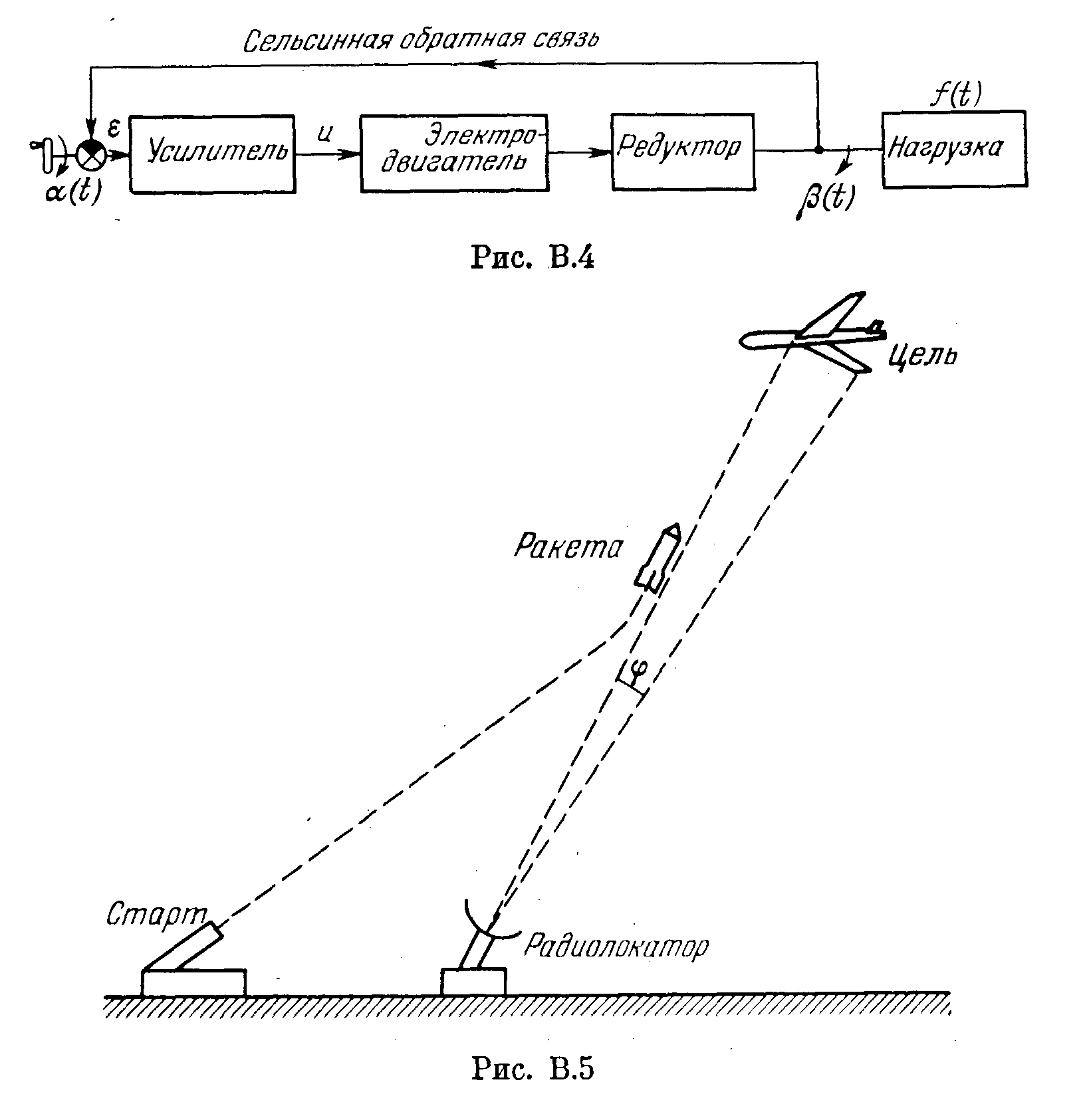
По принципу следящей системы работают системы наведения (рис. В.5) [11]. В следящей системе наведения антенны радиолокатора на летящую цель рассогласованием служит угловая ошибка φ между его лучом и направлением на цель. Исполнительным устройством является электропривод антенны. Радиолокационный сигнал рассогласования содержит помехи, которые должны в системе отфильтровываться от полезного управляющего сигнала (величины рассогласования).
В свою очередь, автопилот наводимой ракеты (рис. В.5) тоже работает по принципу следящей системы, причем рассогласованием для него служит отклонение ракеты от направления луча, а исполнительным устройством является рулевая машина и руль.
Другими примерами такого типа систем являются различные системы телеуправления и самонаведения.
Примерами следящих систем могут являться также измерительные приборы, работающие по компенсационному принципу, когда рассогласованием служит разность между показанием прибора и входной измеряемой величиной (любой физической природы).
В качестве еще одного примера приведем систему автоматического управления курсом самолета (рис. В.6) при помощи автопилота.
На рис. В.6 обозначено: 1 — гироскоп (измеритель курсового угла ψ), 2 — усилитель, 3 — привод, 4 — руль, 5—корпус самолета (управляемый объект). Звенья 7, 2, 8 составляют автопилот. Угол поворота руля δ представляет регулирующее воздействие на объект. Рассогласование формируется в виде электрической величины (рис. В. 6, б)
![]()
где
![]() —
заданный курсовой угол. Настройка
автопилота на заданный курс производится
установкой величины
—
заданный курсовой угол. Настройка
автопилота на заданный курс производится
установкой величины
![]() .
.
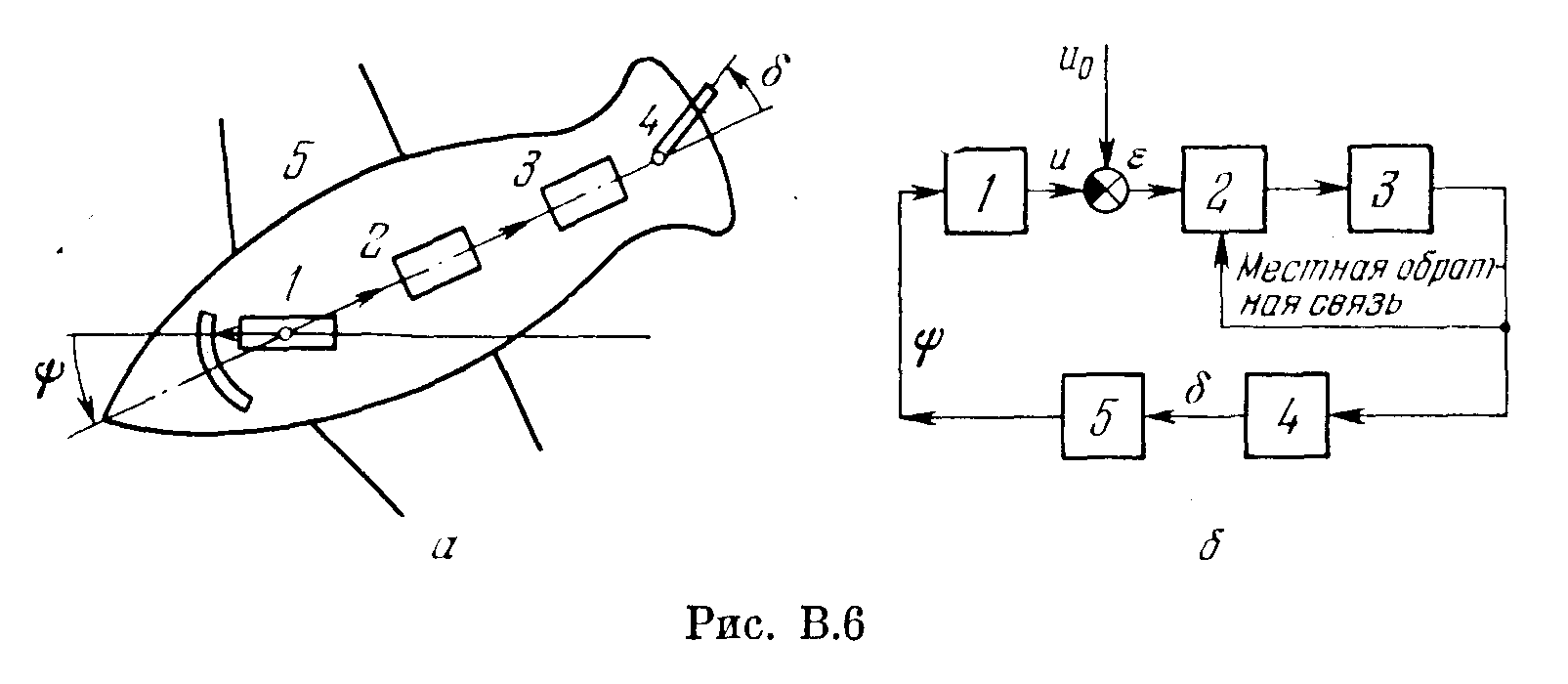
В данном примере показано, что кроме основной обратной связи (измерение регулируемой величины ψ) в системе могут иметься дополнительные местные обратные связи, назначение которых будет изучено позднее.
Важно отметить, что в замкнутых системах автоматического управления и регулирования, как правило, не бывает «спокойного» состояния равновесия. Все время имеются какие-то внешние возмущающие воздействия, порождающие рассогласование, которое заставляет систему работать. Поэтому важнейшим элементом проектирования таких систем является исследование динамических процессов, описываемых обычно системой дифференциальных уравнений, отражающих поведение всех звеньев системы.
Особенностью, усложняющей расчет динамики системы, является то, что в замкнутой системе все физические величины, представляющие воздействие одного звена на другое, связаны в единую замкнутую цепь. Поэтому приходится уравнения динамики всех звеньев системы решать совместно, т. е. иметь дело с дифференциальными уравнениями высокого порядка. Это положение существенно для анализа и синтеза автоматических систем, для исследования устойчивости и качества процессов управления. С этим связан целый арсенал математических методов расчета, которые и будут изучаться в данной книге.
Исторически, первыми автоматическими регуляторами с замкнутым циклом были: регулятор уровня в котле паровой машины И. И. Ползунова (1765 г.) и регулятор скорости вала паровой машины Дж. Уатта
(1784 г.). Первые исследования динамики замкнутых автоматических систем, устойчивости и качества процессов регулирования принадлежат И. А. Вышнеградскому (1876 г.).
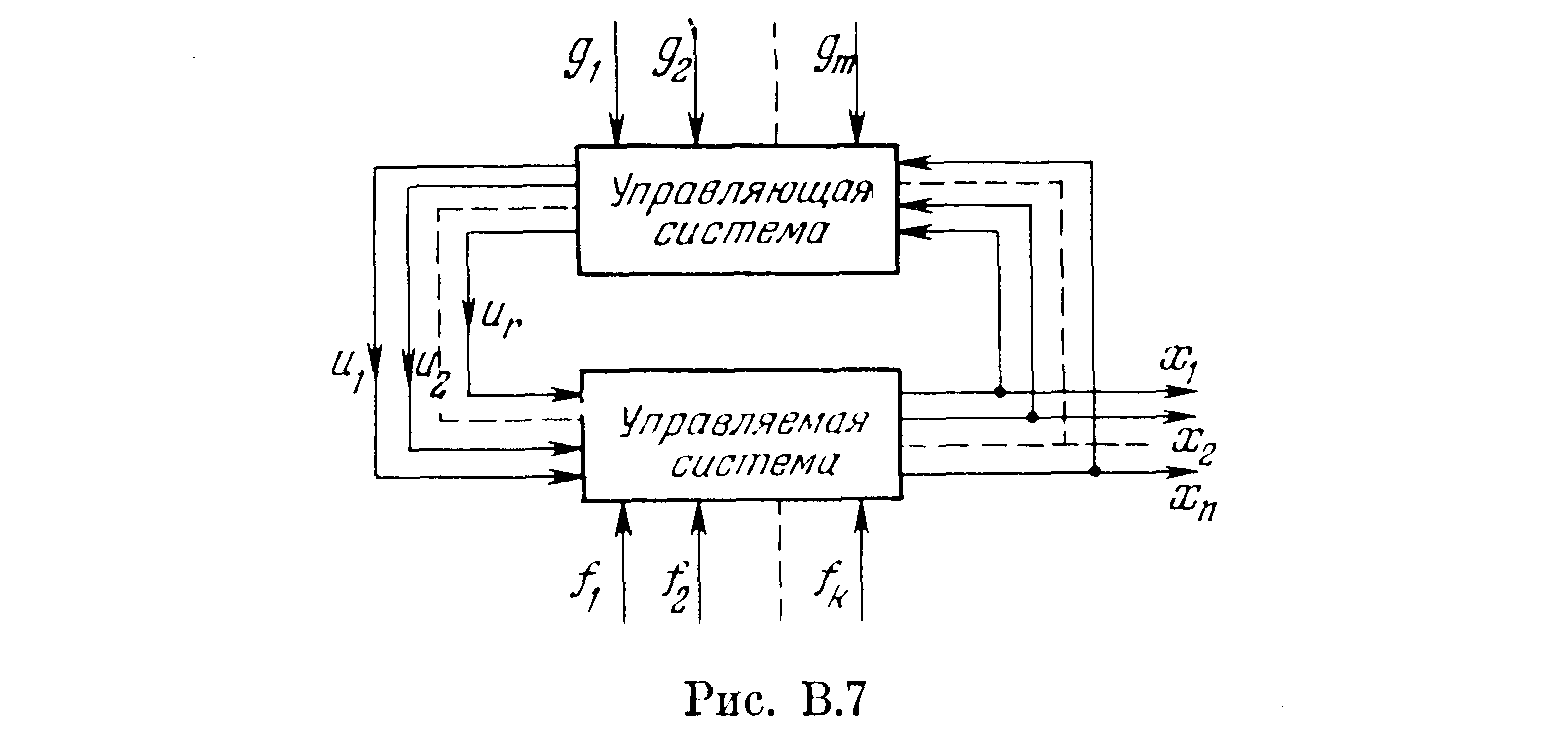
Выше приводились примеры и схемы автоматических систем с одной задаваемой g(t) и одной регулируемой х величинами. В общем же случае система может иметь много входов и выходов (рис. В. 7). Это многомерные (или многосвязные) системы.
Передача воздействий в системе представляет передачу потоков информации о состоянии отдельных элементов системы.
Кроме чисто технических автоматических систем аналогичные принципы действия заложены и в биологических системах, экономических системах и т. п., что изучается соответствующими направлениями кибернетики и общей теории систем управления, а также специальными дисциплинами.
Кроме полностью автоматических систем имеются автоматизированные системы управления или полуавтоматические, в которых кроме технических средств в состав системы управления входят люди. Таковы, например, многие автоматизированные системы управления производственными процессами. В простейших случаях в систему управления включается один человек-оператор, например, при полуавтоматическом управлении летательным аппаратом или какой-либо наземной установкой. Таковы и системы дистанционного управления манипуляторами в агрессивных средах.
Все системы автоматического управления и регулирования делятся по различным признакам на следующие основные классы.
1. По основным видам уравнений динамики процессов управления:
а) линейные системы;
б) нелинейные системы.
2. Каждый из этих основных классов делится на:
а) системы с постоянными параметрами (уравнения с постоянными коэффициентами);
б) системы с переменными параметрами (уравнения с переменными коэффициентами);
в) системы с распределенными параметрами (уравнения в частных производных);
г) системы с запаздыванием (уравнения с запаздывающим аргументом).
3. По характеру передачи сигналов различают:
а) непрерывные системы;
б) дискретные системы (импульсные и цифровые);
в) релейные системы.
4. По характеру процессов управления:
а) детерминированные системы (определенные параметры и процессы);
б) стохастические системы (случайные параметры и процессы).
5. По характеру функционирования:
а) обычные системы;
б) адаптивные системы (самонастраивающиеся, самоорганизующиеся, экстремальные);
в) терминальные системы.
Последние отличаются тем, что в них ставится задача достижения определенного состояния системы в конечный момент времени. До этого весь процесс управления может идти достаточно произвольно с оптимизацией по каким-либо другим показателям, например по расходу энергии.
Приведенные выше примеры относятся к обычным системам. Адаптивные системы имеют, как правило, дополнительные блоки и контуры для анализа показателей качества процесса или внешних условий, по которым необходима адаптация системы.
Каждый из этих основных классов систем в свою очередь делится по ряду принципиальных признаков на различные типы и разновидности, не говоря уже о большом разнообразии конструктивного оформления и различной физической природе реальных систем.
Задачами линейной теории автоматического управления и регулирования являются:
1) изучение динамических свойств и характеристик различных типов звеньев автоматических систем любой физической природы и конструкции;
2) формирование функциональных и структурных схем автоматического управления и регулирования;
3) построение динамических характеристик этих систем;
4) определение ошибок и показателей точности замкнутых систем;
5) исследование устойчивости замкнутых систем;
6) оценка качественных показателей процессов управления;
7) определение чувствительности систем к изменению параметров и других факторов;
8) изучение различных видов корректирующих устройств, вводимых в системы для повышения точности и улучшения динамических качеств;
9) создание частотных, корневых и других методов синтеза корректирующих устройств и различных методов оптимизации систем по показателям качества;
10) разработка методов анализа и синтеза сложных многомерных и комбинированных систем автоматического управления.
Все это является базой для грамотного построения замкнутых автоматических систем и для инженерных расчетов при анализе существующих и проектировании новых систем автоматического управления. Эти методы широко применяются не только для систем регулирования и управления как таковых, но и во всех случаях анализа и разработки замкнутых динамических контуров в любых технических системах, в биотехнических и в экономических системах.