

637_Nosov_V.I._Seti_radiodostupa_CH.2_
.pdfИз (1.10) и (3.4) следует, что максимальная спектральная эффективность BPSK достигается при = 0 и составляет γ = 1.
G( f )
|
|
|
|
|
1 |
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
f |
|
f |
|
|
|
|
|
f |
|
|
f |
f |
||
0 |
0 |
|
|
0 |
0 |
|
|
|
0 |
|
|
|
|
|
|
f |
|
|
|
|
F |
F |
|
|
F |
F |
|
T |
T |
|
|
T |
T |
|
|
2 / |
|
|
2 / |
|
|
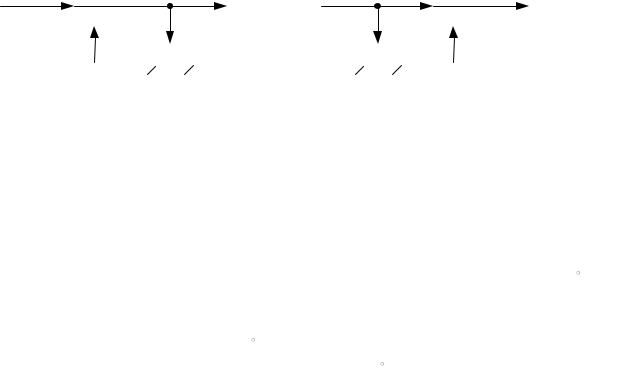
Рис. 3.3 Спектральная плотность мощности сигнала BPSK
Мы рассмотрели модулятор BPSK, все характеристики его элементов и преобразований сигналов. Теперь рассмотрим работу когерентного демодулятора двухпозиционной фазовой модуляции рис. 3.4.
|
|
|
|
ФД |
|
Цифровой |
|
|
|
|
|
сигнал |
|
2-ОФМ |
|
|
|
|
|
|
|
|
|
|
|
Диф. |
|
|
|
|
|
ФНЧ |
РУ |
|
|
|
|
|
декодер |
||
|
|
|
|
|
|
|
2 |
ПФ |
2 |
|
UОП |
FT |
FT |
|
|
|
|
|
ВТЧ |
|
|
|
|
|
|
|
|
|
|
УФОС |
|
|
|
|
|
Рис. 3.4 Структурная схема когерентного демодулятора 2-ОФМ |
|
||||
С выхода приемника модулированный сигнал 2-ОФМ поступает на один из входов перемножителя фазового детектора ФД демодулятора. На второй вход этого перемножителя поступает опорный UОП сигнал, фазированный под
принимаемый модулированный сигнал.
Фазирование опорного сигнала под принимаемый сигнал производится в устройстве формирования опорного сигнала УФОС. Первым блоком УФОС
является устройство возведения в квадрат 2 , в котором устраняется фазовая
51
модуляция входного сигнала. Сигнал с модуляцией BPSK можно представить в виде
s(t) m(t)sin) ( 0t i (t) n(t), |
(3.5) |
где m(t) с равной вероятностью принимает значения 1 в зависимости от значения фазы (t) , n(t) – шум на входе демодулятора. Для отслеживания и
синхронизации фазы несущей опорным сигналом фазовую модуляцию входного сигнала необходимо устранить. Это можно сделать путем возведения сигнала в квадрат
s2 (t) m2 (t)sin2 t (t) n2 |
(t) 2n(t)m(t)sin t (t) |
|
0 |
0 |
|
|
|
(3.6) |
1 2 1 2cos 2 t 2 (t) n2 (t) 2n(t)m(t)sin t (t) . |
||
0 |
0 |
|
Поскольку входной сигнал имеет всего два состояния фазы 0 |
и 180 , то |
|
удвоение фазы сигнала дает на выходе удвоителя частоты фазы |
0 2 0 и |
|
180 2 360 0 , т.е. фазовая модуляция |
в выходном сигнале |
устройства |
возведения в квадрат отсутствует. |
|
|
После устройства возведения в квадрат сигнал с удвоенной частотой 2 f0
проходит через узкополосный фильтр, который отфильтровывает шумы, присутствовавшие во входном сигнале и помехи, появившиеся в умножителе частоты (3.6). Делитель частоты на два 2 восстанавливает исходное значение частоты f0 . Опорный сигнал с частотой f0 проходит через фазовращатель ,
который компенсирует разность фаз входного и опорного сигналов, накопившуюся при обработке сигналов в устройстве формирования опорного сигнала.
Сигнал 2-ОФМ в соответствии с выражениями (1.51) без учета действия шумов даст на выходе перемножителя фазового детектора ФД сигнал
s (t) U |
|
|
|
|
(t) |
|
2E |
|
cos( t 0 |
) cos( t) |
|||||||||
ОП |
|
|
|||||||||||||||||
1 |
|
|
|
|
|
|
|
|
T |
0 |
0 |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
2E |
|
1 |
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
||||||||||||
T |
2 |
cos0 |
|
cos 2 0t . |
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
s (t) U |
|
|
|
(t) |
|
2E |
|
cos( t ) cos( t) |
|||||||||||
ОП |
|
|
|||||||||||||||||
2 |
|
|
|
|
|
|
|
|
|
|
T |
0 |
0 |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
2E |
|
1 |
cos cos 2 t . |
||||||||||||||
|
T |
|
|
|
2 |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
(3.7)
(3.8)
52
Фильтр нижних частот ФНЧ фазового детектора отфильтровывает высокочастотный сигнал с частотой 2 0 и на его выходе будет низкочастотный
сигнал
|
|
|
|
|
|
|
|
|
|
|
u |
1 |
|
2E |
, |
u |
1 |
|
2E |
. |
(3.9) |
|
|
|
|
|||||||
1 |
2 |
|
T |
2 |
2 |
|
T |
|
||
|
|
|
|
|
||||||
Сигналы u1 и u2 , искаженные шумами, помехами и нестабильностью
фазы принимаемого сигнала, поступают на решающее устройство РУ регенератора. Выделитель тактовой частоты ВТЧ регенератора обеспечивает тактовую синхронизацию и момент принятия решения в РУ в середине тактового интервала принимаемого сигнала.
В дифференциальном декодере производится относительное (дифференциальное) декодирование регенерированного сигнала, после чего восстанавливается исходный цифровой сигнал.
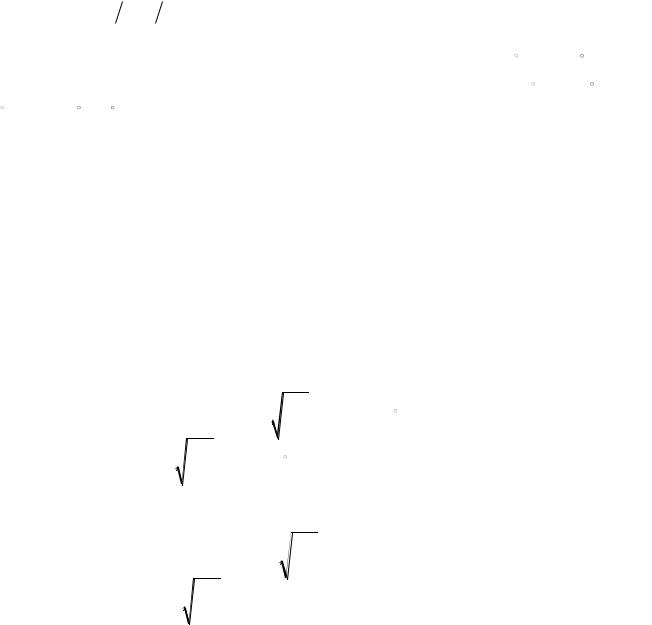
Устройство формирования опорного сигнала может содержать петлю ФАПЧ с генератором управляемым напряжением (ГУН) рис. 3.5.
2-ОФМ |
2 |
|
ПФ |
ФНЧ |
ГУН
Uоп
2
Рис. 3.5 Устройство формирования опорного сигнала с генератором управляемым напряжением
Существенным недостатком устройств формирования опорных сигналов рис. 3.4, 3.5 является наличие в них устройств возведения в квадрат 2 ,
которые при наличии во входном сигнале шума в значительной мере ухудшают точность восстановления фазы опорного сигнала.
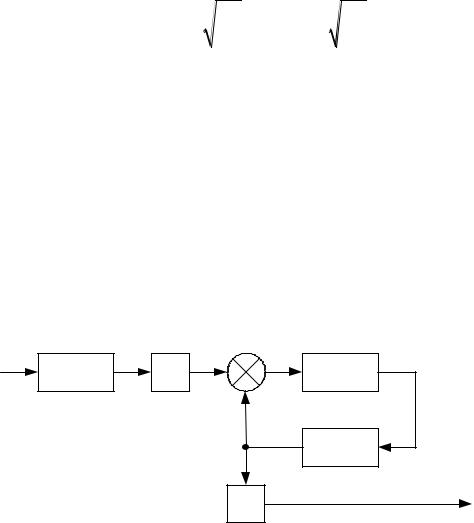
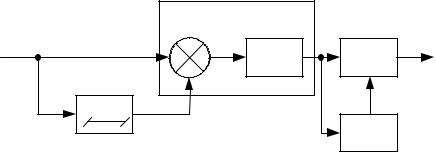
Другой разновидностью устройства формирования опорного сигнала является синфазно-квадратурная схема (Costas loop) представленная на рис. 3.6.
53
|
Демодулированный поток |
ФНЧ |
битов |
|
|
ФД синфазный |
|
2-ОФМ |
Uоп |
|
|
|
ГУН |
ФНЧ |
|
|
|
90
ФНЧ |
ФД квадратурный |
Рис. 3.6 Синфазно-квадратурная схема формирования опорного сигнала
Синфазно-квадратурная схема формирования опорного сигнала рис. 3.6 позволяет избежать применения устройства возведения в квадрат, реализация которого на несущих частотах может оказаться затруднительной. Вместо этого в контур устройства формирования опорного сигнала рис. 3.6 вводится умножитель и относительно простые фильтры нижних частот ФНЧ. Основной проблемой реализации синфазно-квадратурной схемы является то, что в синфазном и квадратурном фазовых детекторах фильтры нижних частот должны быть идеально согласованы.
Таким образом, решение о том, какое устройство формирования опорного сигнала использовать – с устройством возведения в квадрат рис. 3.4, 3.5 или синфазно-квадратурный рис. 3.6,– эквивалентно выбору между сложностью реализации устройства возведения в квадрат и сложностью реализации идеально согласованных фильтров.
Теперь остановимся на необходимости использования относительного (дифференциального) кодирования и декодирования сигнала основной полосы (цифрового сигнала) при использовании фазовой модуляции.
Особенностью всех детекторов сигналов, использующих фазовую модуляцию, является то, что из-за действия шумов и помех в канале связи опорный сигнал с равной вероятностью фазируется под одно из М состояний фазы входного М-ОФМ сигнала. В результате перехода фазирования опорного сигнала с одного из состояний в (М-1) состояние и наоборот происходит случайным образом скачок фазы опорного сигнала в одно из М состояний фаз принимаемого сигнала.
Для рассматриваемого случая двухпозиционной фазовой модуляции М = 2 и фаза опорного сигнала может принимать случайным образом два значения
54
UОП (t) cos( 0t) |
и UОП (t) cos( 0t ). |
(3.10) |
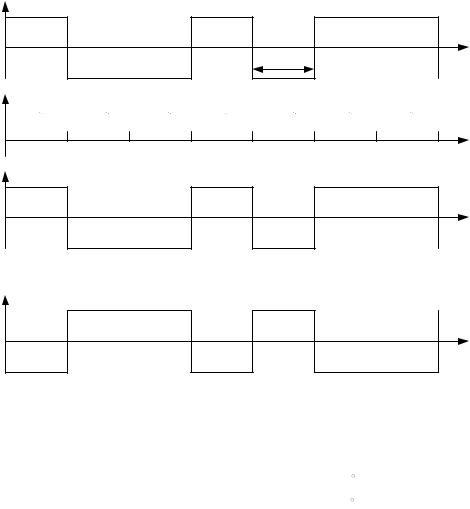
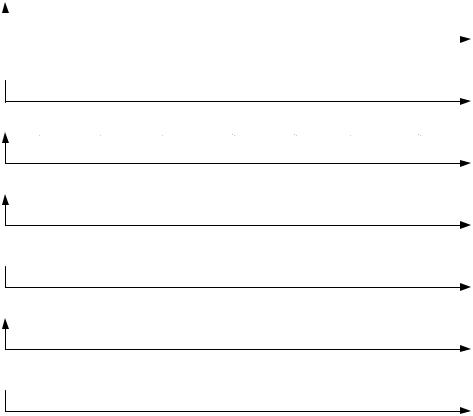
Определим, каким образом скачок фазы опорного сигнала на 180 градусов влияет на качество приема цифрового сигнала. На рис. 3.7 приведены временные диаграммы работы модулятора и демодулятора 2-ОФМ. Для удобства временные диаграммы модулированного сигнала представлены не отрезками гармонического сигнала с соответствующими фазами, а только значениями фаз этих сигналов.
градусов влияет на качество приема цифрового сигнала. На рис. 3.7 приведены временные диаграммы работы модулятора и демодулятора 2-ОФМ. Для удобства временные диаграммы модулированного сигнала представлены не отрезками гармонического сигнала с соответствующими фазами, а только значениями фаз этих сигналов.
Входные данные |
1 |
0 |
0 |
1 |
0 |
1 |
1 |
|
Цифровой сигнал |
t |
|
на входе |
||
Т |
||
модулятора |
||
|
2-ОФМ сигнал на выходе модулятора
Цифровой сигнал на выходе регенератора демодулятора при
UОП (t) cos( 0t)
Выходные данные
Цифровой сигнал на выходе
регенератора
демодулятора при
UОП (t) cos(0t )
0 |
180 |
180 |
0 |
180 |
0 |
0 |
t
t
1 |
0 |
0 |
1 |
0 |
1 |
1 |
t
Выходные данные |
0 |
1 |
1 |
0 |
1 |
0 |
0 |
Рис. 3.7 Временные диаграммы работы модулятора и демодулятора 2-ОФМ
Из рис. 3.7 следует, что при фазе опорного сигнала 0 выходные данные 1001011, а при скачке фазы опорного сигнала на 180 выходные данные получаются инверсными 0110100 (так называемая «обратная работа»). При этом вероятность ошибки достигает максимального значения pош 0,5 и
система с фазовой модуляцией становится не работоспособной.
Для того, чтобы устранить влияние скачков фазы опорного сигнала на вероятность ошибки в системах с фазовой модуляцией было предложено использовать относительное (дифференциальное) кодирование цифрового сигнала перед подачей его на фазовый модулятор. Если обозначить входной цифровой сигнал через m(k) , а выходную кодовую последовательность через
55
c(k) , где k – номер тактового интервала, то процесс дифференциального (относительного) кодирования можно записать в следующем виде
c(k) c(k 1) m(k). |
(3.11) |
А процесс получения выходного сигнала n(k) дифференциального (относительного) декодера можно с учетом (3.11) записать в следующем виде
n(k) c(k) c(k 1) m(k) c(k 1) c(k 1) m(k). (3.12)
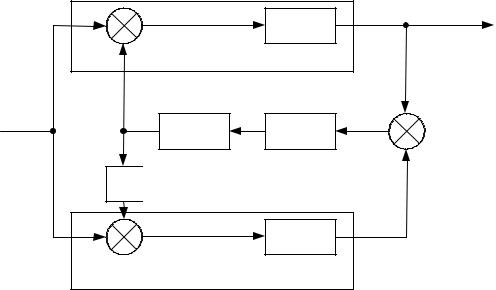
Структурные схемы дифференциального кодера и декодера, построенные на основе выражений (3.11) и (3.12) приведены на рис. 3.8.
m(k)  c(k) c(k)
c(k) c(k)  m(k)
m(k)
c(k 1) |
|
|
|
|
|
|
|
|
|
c(k 1) |
|
|
Т |
|
|
|
Т |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Дифференциальный кодер |
Дифференциальный декодер |
||||||||||
Рис. 3.8 структурные схемы дифференциального кодера и декодера
На рис. 3.9 представлены временные диаграммы работы модулятора и демодулятора 2-ОФМ при использовании относительного кодера и декодера.
Из рисунка 3.9 следует, что при скачке фазы опорного сигнала на 180 на выходе дифференциального декодера восстанавливается исходная последовательность данных, за исключением ошибки (отмечена темным цветом), возникающей в момент 180 скачка опорного сигнала.
Необходимо отметить, что при появлении 180 скачка опорного сигнала в процессе работы, на выходе дифференциального декодера появляются две ошибки, так как выходной сигнал дифференциального декодера определяется двумя соседними битами (формула (3.12) и рис. 3.8). Таким образом, использование дифференциального кодирования с фазовой модуляцией позволяет сохранить работоспособность при скачках фазы опорного сигнала, но при этом происходит спаривание ошибок – при одном скачке фазы опорного сигнала на выходе дифференциального декодера появляются две ошибки.
56
Входные данные |
|
1 |
0 |
0 |
1 |
0 |
1 |
1 |
|
t |
|
||||||||||
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
Сигнал на выходе диф. кодера
диф. кодера
2-ОФМ сигнал на выходе модулятора
Сигнал на выходе
демодулятора при
UОП (t) cos( 0t)
Сигнал на выходе  диф. декодера
диф. декодера
Сигнал на выходе
демодулятора при
UОП (t) cos(0t )
Сигнал на выходе  диф. декодера
диф. декодера
1 |
1 |
1 |
0 |
0 |
1 |
0 |
|
|
|
|
|
|
|
|
|
|
t |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
0 |
0 |
0 |
180 |
180 |
0 |
180 |
|
|
|
|
|
|
|
|
|
|
|
|
t |
|
|
|
|
|
|
|
|
||
1 |
1 |
1 |
0 |
0 |
1 |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
t |
|
|
|
|
|
|
|
|
|
|
1 |
0 |
0 |
1 |
0 |
1 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
t |
|
|
|
|
|
|
|
|
|
|
0 |
0 |
0 |
1 |
1 |
0 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
t |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
0 |
0 |
1 |
0 |
1 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
t |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 3.9 Временные диаграммы работы модулятора и демодулятора 2-ОФМ при использовании дифференциального кодера и декодера
3.1.1 Дифференциальная двухпозиционная фазовая модуляция
Название дифференциальная двухпозиционная фазовая модуляция
(DBPSK – differential binary shift keying) нуждается в пояснении. Термин
дифференциальный определяет два различных аспекта процесса модуляции/демодуляции: процедуру кодирования и процедуру детектирования.
Из рассмотрения двухпозиционной фазовой модуляции следует, что процедура дифференциального (относительного) кодирования является неотъемлемой частью любого вида фазовой модуляции и заключается в том, что выходной сигнал кодера определяется не значением входных двоичных бит, а тем, совпадает ли текущее значение бита с предыдущим или отличается от него. Т.е. выходной бит дифференциального кодера определяется относительным значением двух соседних входных бит.
Термин дифференциальное детектирование сигналов в дифференциальной модуляции BPSK (именно в этом значении обычно используется название DBPSK) связан со схемой детектирования, которая относится к некогерентным схемам, поскольку не требует фазирования опорного сигнала под приходящий сигнал. Структурная схема дифференциального детектора сигнала с двухпозиционной фазовой модуляцией приведена на рис. 3.10, из которого следует, что в таком детекторе в качестве
57
опорного сигнала используется принятый модулированный сигнал, задержанный на величину длительности бита Т.
В дифференциальном детекторе в течение каждого интервала передачи бита вычисляется корреляция двух соседних сигналов, полученных в модуляторе 2-ОФМ рис. 3.1. По этой причине демодулятор, приведенный на рис. 3.10, иногда называют корреляционным.
Рассмотрим пример работы дифференциального (корреляционного) детектора. В качестве входных данных используем данные из рис. 3.9 и процесс получения фазомодулированного сигнала приведем в таблице 3.1.
2-ОФМ
Т |
ФД |
Цифровой |
|
сигнал |
ФНЧ |
РУ |
UОП |
FT |
|
|
|
ВТЧ |
Рис. 3.10 Структурная схема дифференциального демодулятора 2-ОФМ
Таблица 3.1 К пояснению принципа работы дифференциального демодулятора
Номер тактового интервала, k |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
Информационное сообщение, m(k) |
|
1 |
0 |
0 |
1 |
0 |
1 |
1 |
Сообщение на выходе диф. кодера, c(k) |
0 |
1 |
1 |
1 |
0 |
0 |
1 |
0 |
Фаза входного сигнала демодулятора |
|
0 |
0 |
0 |
|
|
0 |
|
Фаза опорного сигнала демодулятора |
|
|
0 |
0 |
0 |
|
|
0 |
Выход РУ демодулятора |
|
1 |
0 |
0 |
1 |
0 |
1 |
1 |
Необходимо отметить, что в данном случае решающее устройство регенератора формирует «1», если фазы входного и опорного сигналов противоположны; и «0» – если фазы входного и опорного сигналов одинаковы.
Из таблицы 3.1 видно, что на выходе решающего устройства регенератора сразу получается исходное информационное сообщение без использования дифференциального декодера, так как в дифференциальном демодуляторе дифференциальное (относительное) декодирование осуществляется в перемножителе фазового детектора.
Поскольку при приеме сигналов DBPSK используется некогерентное детектирование рис. 3.10, то этот вид фазовой модуляции оказывается менее эффективным, чем когерентная BPSK рис. 3.4. Следует отметить, что в демодуляторе BPSK в фазовом детекторе перемножаются зашумленный
58

входной сигнал и опорный сигнал практически не содержащий шумов, так как при его формировании используется узкополосный фильтр. В демодуляторе же DBPSK перемножаются два зашумленных сигнала, поэтому модуляция DBPSK дает вдвое больший шум, чем модуляция BPSK. Следовательно, при использовании DBPSK следует ожидать двукратного (3 дБ) ухудшения отношения Eb  N0 и соответствующего увеличения вероятности ошибки.
N0 и соответствующего увеличения вероятности ошибки.
Преимуществом модуляции DBPSK можно считать меньшую сложность системы.
В этом параграфе мы рассмотрели двухпозиционные методы фазовой модуляции, которые обладают достаточно высокой помехоустойчивостью, невысокой сложностью реализации, но достаточно неэффективно используют выделенную полосу частот – коэффициент спектральной эффективности у них γ = 1. Поскольку частотный ресурс является достаточно дорогостоящим, появилась необходимость его экономного использования, которое достигается применением многопозиционных методов модуляции, имеющих большие коэффициенты спектральной эффективности, чем двухпозиционные методы модуляции.
3.2 Многопозиционная фазовая модуляция
Колебания модулированной несущей с частотой
s (t) |
|
2E |
|
cos t (t) , |
0 t T, |
i 1,2,..., M |
(3.13) |
|
|
||||||||
i |
T |
0 |
i |
|
|
|
||
|
|
|
|
|
|
|
|
|
где i t - определяют закон модуляции фазы несущей.
Приведем соотношения между дискретными значениями фазы сигналаi t и позиционностью (кратностью) модуляции М для многопозиционной фазовой модуляции М-ФМ ,
|
(t) |
2 ai |
. |
(3.14) |
|
||||
i |
|
M |
|
|
|
|
|
||
ai 0,1,2,..., M 1 . |
(3.15) |
|||
M 2k , |
k 1,2,3,... |
(3.16) |
||
Из (3.14) – (3.16) следует, что каждый М-ичный символ ai |
соответствует |
|||
набору из к |
|
|
|
|
k log2 M |
(3.17) |
|||
|
59 |
|
|
|
двоичных информационных бит.
При этом длительность М-ичного символа
Ts |
Tb log2 M |
(3.18) |
где Tb – длительность информационного бита |
входного цифрового |
|
потока. |
|
|
При этом энергия символа |
|
|
|
TC |
|
Es |
s2 (t)dt S02Ts / 2 |
(3.19) |
|
0 |
|
где S0 – амплитуда сигнала.
А энергия модулирующего символа и входного бита связаны
соотношением |
|
Es Eb log2 M |
(3.20) |
Таким образом, из (3.14) – (3.20) следует, что при реализации М позиционной модуляции необходимо входной поток двоичных информационных бит преобразовать в к параллельных цифровых потоков двоичных символов.
Описание многопозиционных модуляторов и демодуляторов облегчается при использовании комплексной формой записи выходного сигнала модулятора
s(t) Re g(t)ei 0t , |
(3.21) |
||||||||||
где g(t) – комплексная огибающая, которую можно записать |
|
||||||||||
g(t) x(t) iy(t) |
|
g(t) |
|
ei (t ) R(t)ei (t ). |
(3.22) |
||||||
|
|
||||||||||
Амплитуда комплексной огибающей определяется из выражения |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
||
R(t) |
|
g(t) |
|
|
|
|
x2 (t) y2 (t), |
(3.23) |
|||
|
|
|
|||||||||
а ее фаза |
|
|
|
|
|
|
|
||||
60 |
|
|
|
|
|
|
|
||||