

637_Nosov_V.I._Seti_radiodostupa_CH.2_
.pdfОтметим, что для заданной системы (постоянное значение Пш ) вероятность ошибок зависит от отношения энергии символа Es к спектральной мощности шума N0 .
В качестве примера типовой системы рассмотрим канал передачи импульсами постоянного тока с характеристикой типа «приподнятый косинус» (1.3, 1.7) и оптимальным распределением характеристик фильтрации на приеме и передаче. Амплитудный спектр сигнала на выходе передатчика соответствует
корню квадратному из спектра типа «приподнятый косинус» Hпд f 
 Yrc f ,
Yrc f ,
определяемого выражением (1.3, 1.7). Согласованный фильтр приема также имеет амплитудно-частотную характеристику, соответствующую корню
квадратному из характеристики типа «приподнятый косинус» Hпр f |
|
. |
||||||||||
Yrc f |
||||||||||||
Отсюда шумовая полоса приемника |
|
|
|
|
|
|
|
|
||||
|
1 / 2T |
|
|
|
|
|
||||||
Пш |
|
H f |
|
2 df |
|
|
Yrc |
f |
|
df 1/ 2T |
(5.13) |
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|||||||
0 |
|
|
|
|
0 |
|
|
|
|
|
|
|
Из (5.13) следует, что шумовая полоса приемника не зависит от α. Характеристика ошибки, представленная в выражении (5.6) для
многоуровневых систем, определяется мощностью шума на входе решающего устройства.
Если рассматривается постоянная шумовая полоса приемника (5.13), т.е. скорость передачи символов остается постоянной, то скорость передачи входного двоичного цифрового потока в модуляторе при этом возрастает с ростом числа уровней.
Если же требуется сопоставить многоуровневые системы при постоянной скорости передачи входного двоичного цифрового потока на входе модулятора,
то длительность символов Ts |
и, следовательно, шумовые полосы должны быть |
||||||||||
соответственно изменены. |
|
|
|
|
|
|
|
|
|||
Если Tb |
– тактовый интервал для двухуровневой системы, в которой Tb Ts |
||||||||||
, то длительность символа Ts |
|
для |
N – |
уровневой системы, обеспечивающей |
|||||||
передачу цифрового сигнала с той же скоростью |
|
||||||||||
|
|
|
|
|
|
|
Ts Tb log2 N. |
(5.14) |
|||
Используя шумовую полосу фильтра с характеристикой типа |
|
||||||||||
«приподнятый конус» (1.3, 1.7) для рассматриваемого случая получим |
|
||||||||||
|
|
p |
|
|
|
1 |
|
N 1 |
erfc(z) |
|
|
|
|
|
|
|
|
(5.15) |
|||||
|
|
|
ош |
|
log2 N |
|
N |
||||
|
|
|
|
|
|
|
|
||||
где z V / N 1 / |
|
|
|
|
|
|
|
|
|
||
N /T . |
|
|
|
|
|
|
|
||||
|
|
0 s |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
151 |
|
|
|
|

Выражение (5.15) можно упростить и представить в более привычной
форме, |
используя то, что согласно (5.8, 5.9) |
E E log |
2 |
N V 2T |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
s |
b |
s |
||
|
|
|
|
|
|
|
pош |
1 |
|
N 1 |
erfc(z) |
|
(5.16) |
||
|
|
|
log2 N |
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
N |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
log2 N |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
где z |
|
|
Eb |
. |
|
|
|
|
|
|
|
|
|||
|
N 1 |
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
No |
|
|
|
|
|
|
|
|
|||
Таким образом, выражение (5.16) определяет вероятность ошибки в многоуровневых системах передачи импульсами постоянного тока при постоянной скорости передачи цифрового сигнала. Требования к полосе для систем с повышенным числом уровней уменьшается пропорционально log2 N .
Выражение (5.16) определяет вероятность ошибок для многоуровневых систем через отношение Eb  N0 (одна и та же скорость передачи цифрового
N0 (одна и та же скорость передачи цифрового
сигнала, но различные полосы).
Следующее соотношение может быть использовано для определения вероятности ошибки в зависимости от отношения сигнал-шум на входе решающего устройства (различные скорости передачи цифровых сигналов, но одна и та же полоса)
Pc |
|
Eb log2 N Ts |
2 |
log2 N Eb / No |
(5.17) |
Pш |
|
||||
|
No 1/ 2Ts |
|
|
||
где 1 2Ts – минимальная (по Найквисту) полоса сигнала.
Отношение сигнал-шум, полученное в (5.17) есть отношение мощности сигнала в момент принятия решения к мощности шума на входе решающего устройства.
5.1 Вероятность ошибки при М-ФМ
Вероятность ошибки для систем с многоуровневой ФМ легче всего получить, используя для сигналов представления с квадратурными каналами. Например, на рисунке 5.2 представлены области ошибок решения для характерных фаз в сигнале с 8-ФМ
Из рисунка 5.2 следует, что если под действием шумов и помех принимаемый сигнал с амплитудой равной 1 и фазой /16 относительно синфазной оси I (что соответствует передачи комбинации символов в трех цифровых потоках 011), переместится в заштрихованные области, при
152
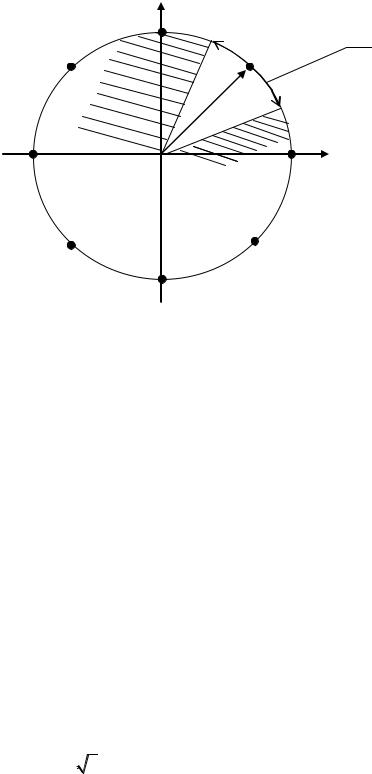
принятии решения произойдет ошибка, т.е. будут приняты либо сигнальная точка, соответствующая комбинации символов 111, либо – 010. Т.е. в данном случае расстояние ошибок d
d 2sin / 8 |
(5.18) |
Q |
|
000 |
d |
|
|
001 |
010 |
101 |
011 |
P
100 |
111 |
110
Рисунок 5.2 Область принятия безошибочных решений при 8-ФМ
В общем случае расстояние ошибок в системах с М-ФМ и с M значениями фаз равно
d 2V sin / М |
(5.19) |
где V – амплитуда сигнала на входе детектора (т.е. радиус в пространстве сигналов при ФМ).
Из рисунка 5.2 следует, что ошибка при детектировании рассматриваемой сигнальной точки 011 приведет к ошибке в цифровом сигнале, равной только одному биту.
Обобщенное выражение для вероятности ошибки при М-ФМ определяется путем модификации выражения (5.4)
|
|
|
pош 1/ log2 M erfc(z) |
(5.20) |
где z sin / М V / |
|
|
|
|
2 . |
|
|||
|
|
|
|
|
|
|
153 |
|
|

Амплитуда сигнала
|
|
|
V |
Eb log2 M / Ts |
(5.21) |
а среднее квадратическое значение напряжения шума
|
|
|
No / 2Ts |
(5.22) |
|
для шума в минимальной по Найквисту полосе сигнала.
Комбинирование выражений (5.20 – 5.22) позволяет установить связь между вероятностью ошибки при М-ФМ, энергией на бит и плотностью шума в канале
pош 1/ log2 M erfc(z) |
(5.23) |
где z sin |
|
|
|
|
|
Eb |
. |
|
log2 M |
||||||||
|
|
|||||||
|
М |
|
|
|
|
No |
||
Для определения зависимости вероятности ошибки от отношения мощности сигнала к мощности шума можно воспользоваться выражением [17]
Pс |
log2 |
M |
Eb |
при М>2 |
(5.23) |
|
Pш |
No |
|||||
|
|
|
|
Для схем MPSK, часто используется код преобразования бинарных символов в М-арные, такой, что двоичные последовательности, соответствующие соседним символам (сдвигам фаз), отличаются только одной битовой позицией; таким образом, при появлении ошибки в М-арном символе высока вероятность того, что ошибочным является только один из k прибывших битов. Кодом, обеспечивающим подобное свойство, является код Грея (Gray code).
На рис. 5.2 для восьмеричной схемы PSK показано распределение битов по символам с использованием кода Грея. Можно видеть, что соседние символы отличаются одним двоичным разрядом. Следовательно, вероятность появления многобитовой ошибки при данной символьной ошибке значительно меньше по сравнению с некодированным распределением битов.
Реализация подобного кода Грея представляет один из редких случаев в цифровой связи, когда определенная выгода может быть получена без сопутствующих недостатков. Код Грея – это просто приобретение, не требующее специальных или дополнительных схем. Можно показать [19], что при
154

использовании кода Грея вероятности битовой pb |
и символьной ps ошибки |
|||
связаны следующим соотношением |
|
|
|
|
pb |
ps |
|
, (для ps |
1). |
log2 |
|
|||
|
M |
|
||
Вероятность появления ошибочного бита при когерентном детектировании сигнала в двухпозиционной относительной фазовой модуляции
2-ОФМ. Сигналы в канале иногда инвертируются; например, при использовании когерентного опорного сигнала, генерируемого контуром ФАПЧ, фаза может быть неоднозначной. Поскольку информация сообщения при 2-ОФМ кодируется подобием или отличием соседних символов, единственным следствием может быть ошибка в бите, который инвертируется, или в бите, непосредственно следующим за инвертированным. Точность определения подобия или отличия символов не меняется при инвертировании несущей опорного сигнала. Иногда сообщения (и кодирующие их сигналы)
дифференциально кодируются и когерентно детектируются, чтобы просто избежать неопределенности в определении фазы.
Вероятность появления ошибочного бита при когерентном детектировании сигналов в двухпозиционной относительной фазовой модуляции 2-ОФМ определяется выражением (5.16) при числе уровней модулирующего сигнала N 2
|
|
|
|
|
|
|
|
E |
|
||
pb |
erfc |
b |
|
. |
|
|
|||||
|
|
N0 |
|
|
|
|
|
|
|
||
Отметим, что существует незначительное ухудшение достоверности детектирования по сравнению с когерентным детектированием сигналов в модуляции PSK (без относительного кодирования). Это вызвано относительным кодированием, поскольку любая отдельная ошибка детектирования обычно приводит к принятию двух ошибочных решений.
В системах с фазовой модуляцией иногда используется дифференциальное (корреляционное) детектирование (глава 1). Такая схема детектирования дает большую, чем схема когерентного детектирования вероятность битовой ошибки за счет того, что здесь на вход перемножителя фазового детектора поступают шумы с входным сигналом и по цепи опорного сигнала. Т.е. в схеме дифференциального (корреляционного) детектирования уровень шумов на входе фазового детектора почти в два раза выше, чем в когерентном детекторе. На этом основании можно заключить, что характеристика качества при корреляционном приеме фазомодулированных сигналов на 3 дБ хуже, чем для когерентного приема. Причем, при двухпозиционной фазовой модуляции это ухудшение не превышает одного
155

децибела при больших отношениях сигнал/шум. А при четырехпозиционной фазовой модуляции это ухудшение при больших отношениях сигнал/шум достигает 2,3 дБ.
Поскольку корреляционный прием двухпозиционной фазовой модуляции мало (менее 1 дБ) уступает по помехоустойчивости системе с когерентным приемом при больших отношениях сигнал/шум и не требует разработки специального метода оценки фазы несущей, то она часто используется в цифровых системах передачи. При использовании же корреляционного приема при четырехфазной модуляции проигрыш по помехоустойчивости системе с когерентным детектированием составляет достаточно большую величину (не менее 2,3 дБ даже при больших отношениях сигнал/шум). Поэтому выбор между этими двумя четырехфазными системами не однозначен, так как необходимо тщательно взвесить между потерями в 2,3 дБ и упрощением в реализации модулятора и демодулятора.
Вероятность ошибки при модуляциях OQPSK и MSK. Ранее говорилось,
что BPSK и QPSK имеют одинаковую вероятность появления битовой ошибки, поскольку QPSK сконфигурирована как два сигнала BPSK на ортогональных компонентах несущей. Так как разнесение потоков данных не меняет ортогональности несущих, схема OQPSK имеет ту же теоретическую вероятность появления битовой ошибки, что и BPSK и QPSK.
Для модуляции двух квадратурных компонентов несущей манипуляция с минимальным сдвигом использует сигналы антиподной формы, cos t 2T
и sin t |
2T , с периодом 2Т. Следовательно, если дня независимого |
восстановления данных из каждого ортогонального компонента используются согласованные фильтры, то модуляция MSK, имеет ту же вероятность появления ошибки, что и BPSK, QPSK и OQPSK [Скляр]. Однако если MSK- модулированный сигнал когерентно детектируется в интервале Т секунд как FSK-модулированный сигнал, то эта вероятность будет ниже, чем у BPSK, на 3 дБ . У MSK с дифференциально кодированными данными, вероятность появления ошибки будет такой же, как и при когерентном детектировании дифференциально кодированных данных в модуляции PSK. Сигналы MSK также можно детектировать некогерентно [19]. Это позволяет осуществлять дешевую демодуляцию (если это позволяет величина принятого отношения
Eb/N0).
5.2 Вероятность ошибки при М-КАМ
Вероятность ошибки в системе с многопозиционной (многоуровневой) модуляцией определяется, в конечном счете, областью (расстоянием) ошибок d. На рисунке 5.3 приведено определение расстояния ошибок для 64-КАМ. При прохождении через радиотракт из-за действия шумов, помех и искажений сигнала будет изменяться его амплитуда и фаза, те изменяться местоположение переданной сигнальной точки. Амплитуда принятого сигнала равна длине вектора проведенного из начала координат к данной сигнальной точке, а фаза –
156


отношения сигнал-шум необходимо воспользоваться выражением (5.17), приняв за N число уровней в каждом из квадратурных каналов.
Из формул (5.19) и (5.25) следует, что М позиционная система с КАМ имеет преимущество перед М позиционной системой с ФМ при одном и том же уровне пиковой мощности. Значения величин расстояний ошибок, рассчитанные по (5.25) приведены в таблице 5.1. Поскольку расстояние ошибок определяет, в конечном счете, коэффициент ошибок (1.61), то в таблице
приведены эти расстояния, выраженные в |
дБ d[дБ] 20log d |
и приведен |
|||||||
выигрыш М-КАМ относительно М-ФМ d . |
|
|
|
|
|||||
|
Таблица 5.1 Расстояния ошибок для М-ФМ и М-КАМ |
|
|
||||||
|
|
ФМ |
|
|
|
КАМ |
|
|
|
М |
|
d, раз |
d, дБ |
М |
|
d, раз |
d, дБ |
∆ d дБ |
|
2 |
|
2 |
6,02 |
- |
|
|
|
- |
|
4 |
|
1,4142 |
3,01 |
4 |
|
1,4142 |
3,01 |
0 |
|
8 |
|
0,7854 |
-2,1 |
8 |
|
0,707 |
-3,01 |
-0,91 |
|
16 |
|
0,3927 |
-8,12 |
16 |
|
0,4714 |
-6,532 |
+1,59 |
|
32 |
|
0,196 |
-14,155 |
32 |
|
0,2828 |
-10,97 |
+3,185 |
|
64 |
|
|
|
64 |
|
0,2020 |
-13,893 |
|
|
|
|
|
|
128 |
|
0,1286 |
-17,815 |
|
|
|
|
|
|
256 |
|
0,0943 |
-20,51 |
|
|
|
|
|
|
1512 |
|
0,0615 |
-24,22 |
|
|
Из таблицы 5.1 видно, что при большом числе сигнальных точек системы с М-КАМ всегда имеют лучшие характеристики, чем системы с М-ФМ. Основная причина этого состоит в том, что расстояние между сигнальными точками в системе с М-ФМ меньше расстояния между точками в сравнимой системе с М-КАМ.
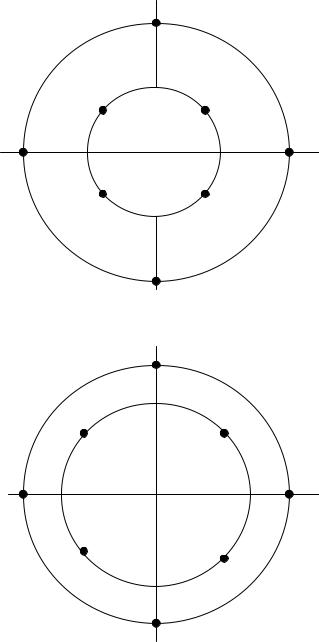
Рассмотрим систему с 8-КАМ, (8-АФМ), варианты расположения сигнальных точек которой приведены на рисунке 5.4 при постоянной пиковой
мощности V 2 1, радиус большой окружности RБ V 1 а, малой окружности RМ 0,5V рисунок 5.4 а.
При этом минимальное расстояние ошибок получается между точками расположенными на внутренней окружности dмин 0,707V , т.е. эта величина
несколько меньше, чем при 8-ФМ. Если же взять радиус внутренней окружности равным 0,707V , рисунок 5.4 б, то dмин 0,707V , т.е. система с 8-
КАМ в первом и втором случаях дает проигрыш относительно системы с 8-ФМ. Полученные значения d (таблица 5.1) показывают, на сколько децибел
отстоят друг от друга кривые зависимости pош Pс / Pш .
Выигрыши в помехоустойчивости, приведенные в таблице 5.1, справедливы, если при ФМ и КАМ используется одинаковая пиковая мощность. А при одинаковом уровне средней мощности система с КАМ демонстрирует еще большее преимущество.
158
а)
б)
Рисунок 5.4 Расположение сигнальных точек при 8-КАМ.
Средняя мощность в системе с ФМ равна пиковой мощности Pср Pпик . А
в системе с КАМ согласно (5.25) отношение пиковой мощности к средней (пик фактор) равно
159
|
|
|
|
KP |
P |
|
N (N 1)2 |
|
|
|
|
|
||
|
|
|
|
пик |
|
|
|
|
. |
|
(5.26) |
|||
|
|
|
|
Pср |
N / 2 |
|
|
|
||||||
|
|
|
|
|
|
2 (2i 1) |
2 |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
i 1 |
|
|
|
|
|
|
|
Значения пик фактора сигнала kP 10log KP |
с КАМ приведены в таблице |
|||||||||||||
5.2. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 5.2 |
Пик фактор сигнала с КАМ |
|
|
|
|
|
|
|||||||
М |
4 |
|
16 |
32 |
|
64 |
|
128 |
256 |
512 |
|
|||
kP ,дБ |
0 |
|
2,553 |
3,30 |
|
3,67 |
|
4,048 |
4,233 |
4,41 |
|
|||
Таблицами 5.1 и 5.2 удобно пользоваться при определении относительной характеристики ошибок, т.е. выигрыша системы в отношении сигнал-шум.
Например, определим выигрыш в отношении сигнал-шум системы с 16КАМ по сравнению с 16-ФМ в случае одинаковых пиковых мощностей, а также в случае одинаковых средних мощностей. Поскольку эти две системы имеют одинаковое число сигнальных точек на фазово-амплитудной плоскости, они передают сигнал с одной и той же скоростью и требуют одной и той же полосы для этой скорости передачи цифрового сигнала.
В соответствии с этим выигрыш в отношении сигнал-шум полностью определяется расстояниями между сигнальными точками. (При использовании различных скоростей надо учитывать влияние различных полос шума в приемниках). Из таблицы 5.1 следует, что при одинаковой пиковой мощности сигнала система с 16-КАМ дает выигрыш по сравнению с системой 16-ФМ равный 1,59 дБ. Из таблицы 5.2 также следует, что в системе с 16-КАМ отношение пиковой мощности к средней равно 2,55 дБ. Поскольку в системах с ФМ отношение пиковой мощности к средней равно единице, преимущество системы с 16-КАМ перед системой с 16-ФМ для равных средних мощностей составит 4,14 дБ.
При определении выигрыша систем с разной позиционностью модуляции, необходимо учитывать изменения полосы шума в приемнике, в зависимости от позиционности модуляции. Если за исходную полосу шума в приемнике взять полосу при двухпозиционной модуляции П2 , то выигрыш Kпш
по отношению сигнал-шум, при полосе занимаемой сигналом с М позиционной модуляцией ПM , при неизменной скорости входного цифрового потока можно
определить
KПШ 10 lg |
П2 |
(5.27) |
|
ПM |
|||
|
|
Результаты расчетов по (5.27) приведены в таблице 5.3.
160