

637_Nosov_V.I._Seti_radiodostupa_CH.2_
.pdf1
0.5
h1(t)
h2(t)
0
0.5 |
|
|
|
|
|
|
|
|
|
|
0.3 |
|
0.2 |
|
0.1 |
0 |
0.1 |
0.2 |
0.3 |
||
|
|
|
||||||||
|
|
|
|
|
|
t |
|
|
|
|
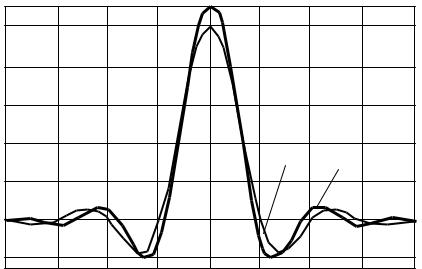
Рис. 1.3 Импульсные характеристики фильтра Найквиста при Т = 0,1 с, h1(t) – = 0,5, h2(t) – = 1,0.
Теоретический предел сужения полосы ФНЧ называется частотой Найквиста FN и соответствует = 0 в выражении (1.3) и на рис. 1.2. При полосе ФНЧ равной полосе Найквиста FФНЧ FN фронты соседних символов на
выходе такого фильтра сильно затягиваются, а амплитуда символа уменьшается почти на половину, т.е. становится почти равной пороговому значению в решающем устройстве регенератора. В результате нули «0» и единицы «1» принятого цифрового сигнала становятся не различимыми и вероятность ошибки на выходе регенератора при этом равна Pb = 0,5, а прием становится невозможным. В выражении (1.5) приведены соотношения для определения полосы Найквиста
N 2 FN 2 |
1 |
, FN |
|
1 |
|
FT |
(1.5) |
|
2Т |
2T |
2 |
||||||
|
|
|
|
|
где Т – длительность символа; FТ – тактовая частота следования символов. Поскольку в сквозном тракте модулятор-демодулятор сигнал проходит через
два последовательно включенных ФНЧ, то сквозная АЧХ тракта
KT (F) K1 K2 , |
(1.6) |
где К1 и К2 - АЧХ фильтров в модуляторе и демодуляторе.
Поэтому для обеспечения требуемой формы сквозной АЧХ необходимо, чтобы
(рис. 1.3-1)
|
|
|
|
K1 K2 KT . |
(1.7) |
||
11 |
|
|
|
Из (1.3 – 1.5) и рис. 1.1 и 1.2 следует, что после фильтра нижних частот полоса, занимаемая цифровым сигналом
П |
|
F (1 ) |
FT |
(1 ), |
где 0 1. |
(1.8) |
ЦС |
|
|||||
|
N |
2 |
|
|
|
|
|
|
|
|
|
|
Минимальная возможная полоса цифрового сигнала получается при = 0 (1.8), т.е. когда фильтр нижних частот представляет собой идеальный ФНЧ рисунок 1.2. При использовании скругленного спектра (1.3) полоса, занимаемая цифровым сигналом (1.8) увеличивается с ростом коэффициента скругления α, так при α = 1 полоса, занимаемая сигналом, увеличивается в два раза по сравнению со случаем α = 0.
h(T) |
|
|
|
|
|
|
|
|
1.0 |
|
|
|
|
|
|
|
|
0.8 |
|
|
|
|
|
|
|
|
0.6 |
|
|
|
|
|
|
|
|
0.4 |
|
|
|
|
|
|
|
|
0.2 |
|
|
|
|
|
а |
б |
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
-0.2 |
|
|
|
|
|
|
|
|
-4 |
-3 |
-2 |
-1 |
0 |
1 |
2 |
3 |
T |
Рис.1.3-1 Импульсные отклики фильтра Найквиста а и корень квадратный из АЧХ фильтра Найквиста б
Для цифровых сигналов принято использовать параметр – скорость передачи цифровой информации R, которая измеряется количеством символов, передаваемых в секунду. Скорость передачи цифровой информации численно равна тактовой частоте следования символов
R |
|
бит |
F |
|
1 |
. |
(1.9) |
|
|
|
|
|
|
||||
|
|
T |
|
|
|
|||
|
|
с |
|
c |
|
|
||
Эффективность использования полосы частот характеризуется удельной скоростью передачи
|
R |
бит/с |
(1.10) |
||
|
|
|
|
||
|
|
|
|
||
|
П |
Гц |
|
||
|
12 |
|
|
|
|

В соответствии с выражениями (1.8 – 1.10), спектральная эффективность цифрового сигнала в коде NRZ
|
R |
|
|
FT |
|
|
2 |
. |
(1.11) |
|
П |
ЦС |
FT |
(1 ) |
(1 ) |
||||||
|
|
2 |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
Из (1.11) следует, что максимальная спектральная эффективность |
||||||||||
цифрового сигнала в коде NRZ получается при = |
0 и равна 2 , т.е. можно |
|||||||||
передать 2 бит с в одном Гц полосы.
с в одном Гц полосы.
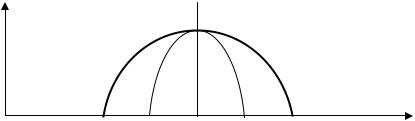
Известно, что искажения формы импульсов удобно наблюдать на так называемой «глазковой» диаграмме рисунок 1.4, где приведены ее формы при α = 0,1 и 0,3 для двухуровневого сигнала. Из рисунка видно, что с уменьшением α раскрыв глазковой диаграммы уменьшается, т.е. помехоустойчивость приема такого сигнала снижается, хотя эффективность использования выделенного диапазона частот увеличивается.
1.2 Амплитудная модуляция
При изменении амплитуды несущего колебания по закону изменения цифрового сигнала (1.1) получается амплитудная модуляция (ASK – amplitude shift keying)
si (t) Ai (t)cos( 0t 0 ), 0 t T, i 1,2,..., M (1.12)
где Ai(t) – амплитуда i-го модулированного сигнала, М – позиционность модуляции.
В (1.13) удобно выразить амплитуду сигнала через его энергию, поскольку она связывает среднюю мощность i-го модулированного сигнала с его длительностью и используется при определении вероятности ошибки (Pb) в процессе детектирования.
1 |
2 |
T |
|
Рисунок 1.4 Огибающие глазковых диаграмм для двухуровневого сигнала 1 – = 0,1, 2 – = 0,3
13
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Максимальное значение амплитуды сигнала Аi в |
|
2 раз превышает ее |
|||||||||||||
среднеквадратическое значение Аск, тогда (1.12) можно записать |
|
||||||||||||||
|
s (t) |
|
cos( |
t |
|
) |
|
cos( |
t |
|
|
|
|||
|
|
|
|
2 A2 |
|
|
|
||||||||
|
2 A |
0 |
0 |
) |
(1.13) |
||||||||||
|
i |
|
скi |
0 |
|
|
скi |
0 |
|
|
|
|
|
||
Сигнал на выходе модулятора представлен в виде напряжения или тока, |
|||||||||||||||
при этом A2 |
равна средней мощности этого сигнала Рi |
на сопротивлении в 1 |
|||||||||||||
скi |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ом. Поскольку энергия сигнала равна произведению его средней мощности
умноженной на длительность элемента цифрового сигнала Ei Pi |
T , то (1.13) |
||||||
можно переписать в виде |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
si (t) |
2Ei |
(t) |
|
cos( 0t 0 ), |
0 t T, i 1,2,..., M |
(1.14) |
|
T |
|
|
|||||
|
|
|
|
|
|
|
|
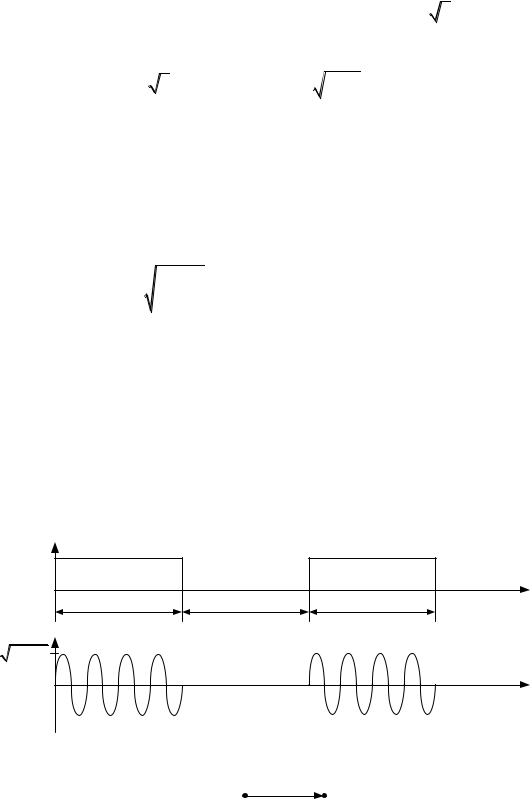
На рис.1.5 представлены временная а и векторная б диаграммы для двухпозиционной амплитудной модуляции. Векторная диаграмма представляет собой совокупность информационных сигналов (векторов или точек пространства сигналов (сигнальных точек)) без указания времени. Другими словами на векторной диаграмме не отображается вращение немодулированного сигнала с постоянной скоростью 0t, а представлено только взаимное расположение векторов – носителей информации.
Данные |
|
1 |
0 |
1 |
0 |
|
|
u(t) |
|
|
|
|
1 |
|
|
|
|
Цифровой |
0 |
|
|
|
t |
сигнал |
|
|
|
|
|
|
T |
T |
T |
|
|
|
|
|
|||
|
|
u(t) |
|
|
|
2E /T |
|
|
|
|
|
АМ сигнал 0 |
t |
|
а)
s2 s1
б)
Рис. 1.5 Двухпозиционная (М = 2) амплитудная модуляция, временная а и векторная б диаграммы
14
Спектральная плотность мощности сигнала на выходе амплитудного модулятора рис. 1.6 представляет собой несущую частоту и две боковые (нижняя и верхняя) полосы, образованные модулирующим сигналом. Т.е. полоса, занимаемая амплитудно-модулированным сигналом, в два раза больше полосы, занимаемой цифровым модулирующим сигналом.
Учитывая полосу, занимаемую цифровым модулирующим сигналом (1.8), можно записать полосу частот, занимаемую амплитудно-модулированным сигналом
G(f)
f |
|
f |
0 |
|
0 |
F- |
|
F- |
T |
|
Т |
|
|
/2 |
|
||
|
|
|
ПАМ
f0
2 ПЦС FT (1 ).
=1
=0
f |
|
f |
|
0 |
|
0 |
|
+ |
F+ |
|
T |
|
|
F |
Т |
|
|
/2 |
|
|
|
||
|
|
|
(1.15)
f
Рисунок 1.6 Полоса частот амплитудно-модулированного сигнала
Двухуровневая (М = 2) амплитудная модуляция была одной из первых форм цифровой модуляции, созданных для беспроводной телеграфии. Однако в настоящее время простая схема амплитудной модуляции уже не используется.
15
Контрольные вопросы
1.Назовите методы модуляции.
2.Чем отличаются когерентный и некогерентный методы детектирования.
3.Изобразите АЧХ фильтра Найквиста для разных коэффициентов скругления.
4.Импульсная характеристика фильтра Найквиста при разных коэффициентах скругления.
5.Определение полосы частот, занимаемой цифровым сигналом на выходе фильтра Найквиста.
6.Как определяется спектральная эффективность цифрового сигнала в коде NRZ.
7.Изобразите временную форму амплитудно - модулированного сигнала.
8.Определите полосу частот, занимаемую амплитудно-модулированным сигналом.
16

2 ЧАСТОТНАЯ МОДУЛЯЦИЯ
При модуляции высокочастотного гармонического колебания цифровым сигналом по частоте (FSK – frequency shift keying), выражение для него может быть записано следующим образом [13, 19]
s (t) |
|
2E |
|
cos( t |
), |
0 t T , |
i 1, 2,..., M |
(2.1) |
|
|
|||||||||
i |
|
|
i |
0 |
|
|
|
|
|
|
|
Ts |
|
|
|
|
|
||
где it 0 i д , д – девиация частоты.
При двухпозиционной (М = 2) частотной модуляции в процессе модуляции двоичным цифровым сигналом получаются два значения частоты
1 0 д , |
и 2 0 д , разнесенных на |
P 2 1 . При |
этом |
|||||||
девиация частоты д и индекс частотной модуляции m равны |
|
|||||||||
|
|
|
|
|
/ 2, |
m |
2 FД |
FP . |
(2.2) |
|
|
д |
P |
|
|||||||
|
|
|
|
|
FT |
|
FT |
|
||
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
s |
|
s |
|
где Т – длительность модулирующего символа.
На рис. 2.1 приведены временные диаграммы для двухпозиционной частотной модуляции. На рисунке можно наблюдать типичное для этого вида модуляции изменение частоты модулируемого гармонического сигнала в моменты переходов между символами. Изменение частоты может быть довольно резким, если в модулирующем сигнале имеются резкие переходы между символами рис. 2.1 а и б.
Усовершенствованным видом частотной модуляции является ЧМ с непрерывной фазой (ЧМНФ) (CPFSK – continuous phase FSK), при которой в моменты переходов двоичных символов не происходит скачков фазы, что позволяет уменьшить полосу частот, занимаемую ЧМ сигналом. Плавный переход (непрерывность) фазы модулированного сигнала обеспечивается цифровым сигналом, пропущенным через фильтр Найквиста рис. 1.2. При этом частота модулированного сигнала изменяется по закону приподнятого косинуса, а фаза модулированного сигнала будет непрерывной.
При приеме ЧМ сигналов часто используется некогерентное детектирование, которое осуществляется по огибающей модулированного сигнала либо по его мгновенной частоте. Для приема по огибающей модулированного сигнала используется фильтровая схема частотного детектора (ЧД) рис. 2.2, а. Разделение сигналов с частотами f1 и f2 производится с помощью полосовых фильтров ПФ1 и ПФ2, настроенных на эти частоты с полосой равной тактовой частоте ППФ 1 Т FT .
17

Данные |
|
|
1 |
0 |
1 |
0 |
|
|
u(t) |
|
|
|
|
|
1 |
|
|
|
|
|
Цифровой |
0 |
|
|
|
|
t |
сигнал |
|
|
|
|
|
|
|
|
T |
T |
T |
|
|
|
|
|
|
|||
|
|
u(t) |
f2 |
f1 |
f2 |
|
|
|
|
|
|||
2E /T |
|
|
|
|
|
|
ЧМ сигнал 0 |
t |
|
Рис. 2.1 Двухпозиционная (М = 2) частотная модуляция
После полосовых фильтров детекторы огибающей, состоящие из амплитудных детекторов АД1 и АД2 и фильтров нижних частот ФНЧ1 и ФНЧ2, выделяют огибающие этих двух сигналов, которые представляют собой модулирующий цифровой сигнал искаженный шумами и помехами. В решающем устройстве РУ регенератора принимается решение о принятом бите, на основе сравнения амплитуд принятых сигналов с пороговым значением в середине тактового интервала Т. Середина тактового интервала принятых бит определяется с помощью системы тактовой синхронизации в блоке выделителя тактовой частоты ВТЧ.
Прием по мгновенной частоте рис. 2.2, б осуществляется при помощи линейного частотного дискриминатора, выполненного на резонансном контуре. В частотном дискриминаторе производится преобразование изменения частоты в изменение амплитуды, т.е. преобразование частотной модуляции в амплитудную модуляцию. После амплитудного детектора получается модулирующий цифровой сигнал, искаженный шумами и помехами, который через ФНЧ поступает на решающее устройство регенератора.
При точной настройке фильтров приемника, когда средняя частота настройки f0 ( f1 f2 ) 2 , напряжение на его выходе представляет собой
2 , напряжение на его выходе представляет собой
двухполярные посылки постоянного тока. При наличии нестабильности несущей частоты ЧМ сигнала относительно частоты f0 возникают искажения амплитуд сигналов, и снижается помехоустойчивость приема.
Помимо схем некогерентного приема бинарных ЧМ сигналов по огибающей модулированного сигнала либо или по его мгновенной частоте рис. 2.2, существует схема квадратурного некогерентного детектирования на основе корреляторов рис. 2.3. При этом оборудование демодулятора следует настроить как детектор энергии без фазирования опорного сигнала.
18

|
|
|
|
|
|
|
|
|
cos t |
детектор |
огибающей |
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ЧМ |
|
|
|
|
ПФ1 |
|
|
|
|
АД1 |
|
|
|
ФНЧ1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
Цифровой |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ВТЧ |
|
|
|
|
РУ |
|
|
|||||||||
сигнал |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
сигнал |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
cos2t |
детектор огибающей |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
ПФ2 |
|
|
АД2 |
|
|
|
ФНЧ2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
а) |
|
|
|
|
|
|
|
|
|
|||||||
|
ЧМ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Цифровой |
|||||
|
|
|
ЧМ |
|
|
|
АД |
|
|
|
ФНЧ |
|
|
|
|
|
|
|
РУ |
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
сигнал |
|
|
|
|
АМ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
сигнал |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ВТЧ
б)
Рис. 2.2 Структурные схемы детекторов двухпозиционных ЧМ сигналов а) при приеме по огибающей, б) при приеме по мгновенной частоте
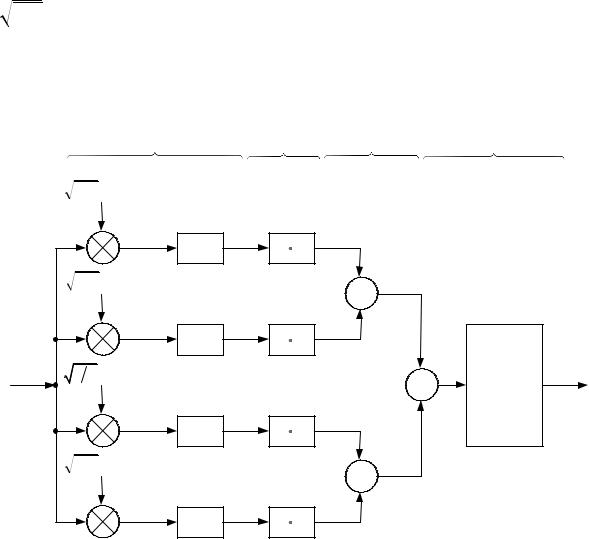
По этой причине некогерентный детектор обычно требует вдвое большего числа ветвей каналов, чем когерентный, так как отсутствие информации о фазе приходящего сигнала требует использования синфазного и квадратурного каналов при некогерентном детектировании.
Входной сигнал демодулятора r(t) представляет собой сумму частотно-
модулированного сигнала si (t) и шума n(t) |
|
r(t) si (t) n(t) |
(2.3) |
На рис. 2.3 показаны синфазный (I) и квадратурный (Q) каналы, используемые для некогерентного детектирования сигналов бинарной частотной модуляции BFSK. Как следует из рисунка, две верхних ветви настроены на детектирование сигнала с частотой 1 , причем для синфазной
ветви опорный сигнал имеет вид 
 2
2 T cos 1t , а для квадратурной –
T cos 1t , а для квадратурной – 
 2
2 T sin 1t
T sin 1t
. Подобным образом две нижних ветви настроены на детектирование сигнала с частотой 2 , причем для синфазной ветви опорный сигнал имеет вид

 2
2 T cos 2t , а для квадратурной –
T cos 2t , а для квадратурной – 
 2
2 T sin 2t .
T sin 2t .
Предположим, что принятый сигнал r(t) имеет вид cos 1t n(t), т.е. фаза
сигнала точно равна нулю. Следовательно, сигнальный компонент принятого сигнала точно соответствует по частоте и фазе опорному сигналу верхнего синфазного канала. Именно в этом канале будет получен максимальный сигнал на выходе интегратора. Вторая ветвь должна дать нулевой выход
19
(проинтегрированный шум с нулевым средним) поскольку ее опорный сигнал

 2
2 T sin 1t ортогонален сигнальному компоненту r(t) . Если в модуляторе
T sin 1t ортогонален сигнальному компоненту r(t) . Если в модуляторе
сформированы ортогональные сигналы, то третья и четвертая ветви так же должны дать близкие к нулю выходные сигналы интеграторов, поскольку их опорные сигналы так же ортогональны компоненту сигнала r(t) .
Корреляция

 2
2 T cos 1t
T cos 1t
Синфазный
канал T
0

 2
2 T sin 1t
T sin 1t
Квадратурный
канал T
0
r(t) |
2 T cos 2t |
|
Синфазный
канал T
0

 2
2 T sin 2t
T sin 2t
Квадратурный
канал T
0
|
Возведение Суммирование Тестовая статистика |
||||||
|
в квадрат |
|
|
и принятие решения |
|||
z1 |
(T ) |
|
2 |
z2 |
|
|
|
|
|
1 |
|
|
|
||
|
|
|
|
|
z2 |
z2 |
|
|
|
|
|
1 |
2 |
|
|
z2 |
(T ) |
|
2 |
z2 |
|
|
|
|
|
2 |
|
|
Цифровой |
||
|
|
|
|
|
|
сигнал |
|
|
|
|
|
|
|
z(T ) |
Схема |
|
|
|
|
|
|
принятия |
|
|
|
|
|
|
|
|
решения |
z3 |
(T ) |
|
2 |
z2 |
|
|
|
|
|
3 |
|
|
|
||
|
|
|
|
|
z2 |
z2 |
|
|
|
|
|
3 |
4 |
|
|
z4 |
(T ) |
|
2 |
z2 |
|
|
|
|
|
4 |
|
|
|
||
Рис. 2.3 Квадратурный некогерентный демодулятор сигнала BFSK
Теперь предположим, что принятый сигнал r(t) имеет вид sin 1t n(t). в
этом случае максимальный выходной сигнал должна дать вторая ветвь схемы рис. 2.3, а выходные сигналы других ветвей должны быть близки к нулю.
В реальной ситуации сигнал r(t) скорее всего будет иметь вид cos( 1t ) n(t), т.е. входной сигнал будет частично коррелировать с опорным сигналом cos 1t и частично – с опорным сигналом sin 1t . Именно по этой
причине некогерентный приемник ортогональных сигналов требует синфазной и квадратурной ветвей для каждого возможного сигнала набора.
Блоки, показанные на рис. 2.3 после интеграторов произведений входного и опорного сигналов, выполняют операцию возведения в квадрат, что предотвращает появление возможных отрицательных значений. Затем для каждого класса сигналов набора (в бинарном случае для двух) складываются
величины z12 из синфазного канала и z22 из квадратурного канала. И, наконец, в
20