

637_Nosov_V.I._Seti_radiodostupa_CH.2_
.pdfЧММС является частным случаем частотной модуляции с непрерывной фазой. Этот метод представляет собой частотную модуляцию, при которой несущая частота дискретно – через интервалы времени, кратные периоду Т битовой модулирующей последовательности, принимает значения f1 и f2.
В модуляторе MSK рис. 2.9 и 2.10 входная битовая последовательность длительностью Tb разбивается в преобразователе кода ПрК на две
последовательности символов dI и dQ, длительность которых равна Ts 2Tb .
Последовательности символов dI и dQ получаются из нечетных и четных битов, соответственно рис. 2.10.
Полученными перекодированными импульсами в виде полупериодов гармонического сигнала модулируется синфазная cos 0t и квадратурная
составляющие несущего гармонического колебания. Окончательный
модулированный сигнал получается как результат перемножения модулирующих сигналов квадратурных
Поток dI задерживается на время длительности бита Tb относительно
потока dQ. Затем оба потока символов поступают на устройство предварительного кодирования, где символы в виде прямоугольных импульсов заменяются полупериодами гармонического сигнала косинусоиды cos t 2T
2T
для потока dI и синусоиды sin t 2T для потока dQ рис. 2.10. Далее эти
2T для потока dQ рис. 2.10. Далее эти
сигналы квадратурных каналов перемножаются с соответствующими несущими sin( 0t) и cos( 0t) и последующего суммирования полученных произведений.
Наличие задержки модулирующего сигнала в синфазном канале I позволяет сместить моменты переходов модулирующих импульсов на длительность бита Tb , т.е. производить модуляцию в синфазном I и
квадратурном Q каналах не одновременно.
Модулированный сигнал (выходной сигнал модулятора) рис. 2.9 на протяжении очередного n-го бита определяется выражением, зависящим от
состояния текущего n-го и предшествующего (n - 1)-го бита |
|
||||||||
|
t |
t |
|
|
|
|
|
||
s(t) cos |
|
cos 0t sin |
|
sin 0t, |
(n 1)T t nT. |
(2.26) |
|||
|
|
||||||||
|
2T |
2T |
|
|
|
|
|
||
Из выражения (2.26) следует, что текущая фаза модулированного сигнала |
|||||||||
|
|
|
(t) 0t |
t |
|
(2.27) |
|||
|
|
|
|
|
|
||||
|
|
|
2T |
|
|||||
|
|
|
|
|
|
|
|
||
т.е. набег фазы на интервале Т одного бита |
|
|
|||||||
|
|
|
|
, |
|
|
|
(2.28) |
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
31 |
|
|
|
|
|
|
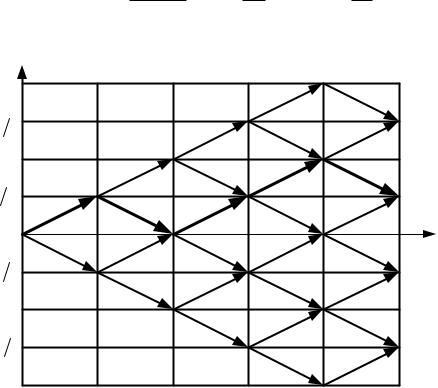
что отражено на рис. 2.11 с учетом рис. 2.10. |
|
|
|
||||||||
Мгновенная частота сигнала с ММС есть производная от фазы |
|
||||||||||
|
|
d (t) |
|
|
|
|
|
F |
|
||
|
(t) |
|
|
|
0 |
|
|
||||
|
|
|
dt |
|
2T |
2 f0 |
T . |
(2.29) |
|||
|
|
|
|
|
|
|
|
4 |
|
||
|
(t) |
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
3 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
t |
|
|
|
|
|
|
|
|
|
|
|
|
|
T |
|
|
2T |
|
3T |
|
4T |
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 2 |
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
Рис. 2.11 |
Изменение фазы при ММС |
|
|
|||||||
Из (2.29) следует, что мгновенная частота принимает одно из двух |
|||||||||||
значений – f1 |
или f2. постоянное на протяжении бита |
|
|
|
|||||||
f |
f |
|
|
1 |
, и |
f |
|
f |
|
|
1 |
. |
(2.30) |
0 |
|
2 |
0 |
|
|||||||||
1 |
|
|
4T |
|
|
|
|
4T |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|||
где f0 - частота модулируемого гармонического колебания, а FТ = 1/Т – тактовая частота входной битовой последовательности. Разнос частот при этом равен
f |
|
f |
|
f |
|
FT |
. |
(2.31) |
P |
2 |
|
||||||
|
|
1 |
2 |
|
|
|||
|
|
|
|
|
|
|
||
Таким образом, изменение знака начальной фазы во второй части выражения (2.26) означает переход от f1 к f2 или обратно. Изменение же общего знака выражения (2.26), эквивалентно изменению начальной фазы на /2, позволяет сохранить непрерывность фазы при изменении частоты.
Разнос частот (2.31) является минимально возможным, при котором обеспечивается ортогональность колебаний частот f1, и f2 на интервале Т
32
длительности одного бита, при этом за время бита Т между колебаниями частот |
|||||||||
f1, и f2 набегает разность фаз, равная /2. Таким образом, термин "минимальный |
|||||||||
сдвиг" в названии метода модуляции относится, в указанном выше смысле, к |
|||||||||
сдвигу частоты. |
|
|
|
|
|
|
|
|
|
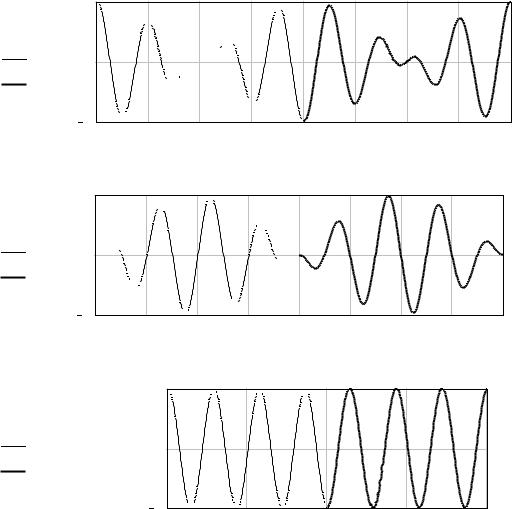
На рис. 2.12 приведены временные диаграммы сигналов на выходе |
|||||||||
перемножителей синфазного и квадратурного каналов |
и на выходе сумматора |
||||||||
фазового модулятора рис. 2.9. |
|
|
|
|
|
|
|
||
|
1 |
|
|
|
|
|
|
|
|
f1(t1) f2(t1) |
|
|
|
|
|
|
|
|
|
f1(t2) f2(t2) |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 0 |
0.01 |
0.02 |
0.03 |
0.04 |
0.05 |
0.06 |
0.07 |
0.08 |
|
|
|
|
|
t1 t2 |
|
|
|
|
|
|
|
|
|
а) |
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
f3(t1) f4(t1) |
|
|
|
|
|
|
|
|
|
f3(t2) f4(t2) |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 0 |
0.01 |
0.02 |
0.03 |
0.04 |
0.05 |
0.06 |
0.07 |
0.08 |
|
|
|
|
|
t1 t2 |
|
|
|
|
|
|
|
|
|
б) |
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
f1(t1) f2(t1) f3(t1) f4(t1) |
|
|
|
|
|
|
|
|
|
f1(t2) f2(t2) f3(t2) f4(t2) |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
1 0 |
|
0.02 |
0.04 |
|
0.06 |
|
0.08 |
|
|
|
|
|
t1 t2 |
|
|
|
|
|
|
|
|
|
в) |
|
|
|
|
Рис. 2.12 Сигнал на выходе: |
синфазного |
канала I |
а), квадратурного |
||||||
канала Q б), сумматора в) модулятора ММС. |
|
|
|
|
|||||
Поскольку модулирующая частота в этом случае равна FТ/2, а девиация |
|||||||||
частоты FТ/4, то согласно (2.2), (2.29 – 2.31) индекс частотной модуляции для |
|||||||||
ЧММС составляет |
|
|
|
|
|
|
|
|
|
33

|
2 FД |
|
2 |
FT |
|
|
|
m |
|
4 |
|
0,5. |
(2.32) |
||
FT |
FT |
|
|||||
|
|
|
|
|
|||
При модуляции минимальным сдвигом наличие задержки |
|||||||
модулирующего сигнала в синфазном канале I |
|
позволяет сместить моменты |
|||||
переходов модулирующих импульсов на длительность бита Tb , т.е. производить модуляцию в синфазном I и квадратурном Q каналах не одновременно. Кроме того, при этом виде модуляции прямоугольные импульсы модулирующего сигнала заменяются полупериодами гармонического сигнала, что обеспечивает плавное изменение фазы модулированного сигнала. Всѐ это приводит к тому, что сигнал с ММС имеет достаточно компактный спектр по сравнению с другими видами модуляции сравнимыми с ним по спектральной эффективности.
Полоса, занимаемая сигналом с ММС равна |
|
||||
П |
|
|
FT |
(1 ). |
(2.33) |
ММС |
|
||||
|
2 |
|
|
||
|
|
|
|
||
В соответствии с (2.33) максимальная спектральная эффективность данного вида модуляции γ = 2.
Введение в тракт модулирующего сигнала относительно узкополосного гауссовского фильтра рис. 2.9 приводит к сглаживанию резких переходов в модулирующем сигнале dI cos t 2T и dQ sin t
2T и dQ sin t 2T рис. 2.10. Это приводит
2T рис. 2.10. Это приводит
к дальнейшему снижению внеполосных составляющих по сравнению с обычной ММС. Такой вид модуляции получил название гауссовская модуляция минимальным сдвигом ГММС (GMSK).
Структурная схема демодулятора приведена на рис. 2.9. б. В фазовых
детекторах |
ФДI |
и ФДQ |
демодулятора |
с помощью |
опорного |
|
сигнала |
|
cos t 2T cos 0t |
фазированного под принимаемый сигнал, производится |
|||||||
разделение |
квадратурных |
сигналов и их |
фильтрация. На |
выходах фазовых |
||||
детекторов получаются модулирующие символьные сигналы |
€ |
€ |
, |
|||||
dI |
и dQ |
|||||||
искаженные шумами и помехами. В решающих устройствах РУI |
и РУQ |
c |
||||||
использованием тактовой частоты выделенной из принятого сигнала в блоке ВТЧ (тактовая синхронизация), восстанавливается исходный модулирующий символьный сигнал dI и dQ , который в преобразователе кода преобразуется в
исходный битовый цифровой сигнал.
2.3 Синхронизация цифрового сигнала
2.3.1 Тактовая синхронизация
34

В цифровой системе связи выход демодулятора должен периодически стробироваться со скоростью передачи символов в точно выбранных моментах времени tm mT , где T – символьный интервал, m – 0, 1, 2, и т.д.
Чтобы выполнять это периодическое стробирование, требуется таймерный сигнал в приемнике. Процесс получения такого таймерного сигнала в приѐмнике обычно называется тактовой синхронизацией (синхронизацией символов) или восстановлением отсчѐтов времени.
Восстановление отсчѐтов времени - одна из наиболее ответственных функций, которые выполняются в приѐмнике синхронных цифровых систем связи. Отметим, что приемник должен знать не только частоту FT 1 T , с
которой стробируются выходы фазовых детекторов, но также и тот момент времени, в который необходимо взять отсчѐты внутри каждого символьного интервала. Положение отсчѐтного момента внутри символьного интервала длительностью Т называют фазой синхронизации.
Итак, для оптимальной демодуляции все цифровые приемники должны синхронизироваться с переходами поступающих цифровых символов. При изложении материала в данном разделе предполагается, что о реальной информационной последовательности ничего не известно. Класс символьных синхронизаторов, используемых в подобном случае, называется синхронизаторами без применения данных (non-data-aided — NDA). Существует еще один класс символьных синхронизаторов, которые используют известную информацию об информационном потоке. Эта информация может извлекаться из введенной в информационный поток известной последовательности (data-aided — DA).
Рассматриваемые символьные синхронизаторы можно разделить на две основные группы. Первая группа состоит из разомкнутых синхронизаторов. Данные схемы выделяют копию выхода генератора тактовых импульсов передатчика непосредственно из поступающего информационного потока. Вторая группа – это замкнутые синхронизаторы; они синхронизируют локальный генератор тактовых импульсов с поступающим сигналом посредством сличения локального и поступающего сигналов. Замкнутые синхронизаторы, как правило, точнее, но при этом сложнее и дороже.
Разомкнутые символьные синхронизаторы также иногда называют нелинейными синхронизаторами на фильтрах [20]; данное название говорит само за себя. Сихронизаторы этого класса генерируют частотный компонент со скоростью передачи символов, пропуская поступающий низкочастотный сигнал через последовательность фильтра и нелинейного устройства. В данном случае желательный частотный компонент, передаваемый со скоростью передачи символов, изолируется с помощью полосового фильтра, после чего насыщающий усилитель с высоким коэффициентом насыщения придает ему нужную форму. В результате восстанавливается прямоугольный сигнал тактовых импульсов.
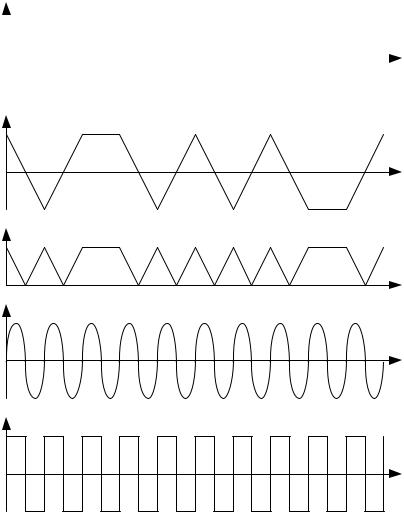
На рис. 2.13 приведены три примера разомкнутых символьных синхронизаторов.
35
s(t) |
|
|
|
|
|
|
|
|
|
|
|
FT |
||
Согласованный |
|
|
|
2 |
|
|
Полосовой |
sgn |
||||||
|
|
|
|
|
|
|
|
|||||||
|
|
фильтр |
|
|
|
|
|
фильтр |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
a)
s(t) |
|
Полосовой |
FT |
|
sgn |
||
|
|
фильтр |
|
|
m(t) |
|
|
|
|
|
|
|
T 2 |
|
|
б)
s(t) |
|
|
|
|
|
|
|
|
|
|
|
|
|
FT |
||
ФНЧ |
|
|
d dt |
|
|
2 |
|
|
Полосовой |
sgn |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
фильтр |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
в)
Рис. 2.13 Три типа разомкнутых символьных синхронизаторов
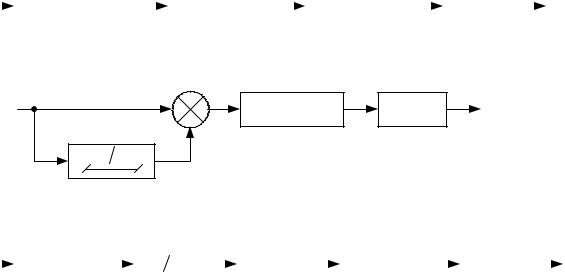
Впервом примере (рис. 2.13, а) поступающий сигнал s(t) фильтруется
сиспользованием согласованного фильтра. Необходимо отметить, что в данном случае рассматривается сигнал s(t) на выходе демодулятора, т.е.
сигнал основной полосы (base band). Выход этого фильтра – автокорреляционная функция исходного сигнала. Например, для передачи с помощью прямоугольных импульсов на выходе имеем сигнал, состоящий из равнобедренных треугольников.
Затем полученная последовательность спрямляется с помощью некоторой нелинейности четного порядка, например квадратичного устройства. Полученный сигнал будет содержать пики положительной амплитуды, которые, с точностью до временной задержки, соответствуют переходам входных символов. Последовательность описанных процессов изображена на рис. 2.14.
Таким образом, сигнал с выхода четного устройства будет содержать Фурье-компонент на собственной символьной частоте FT . Данная частотная
составляющая изолируется от остальных гармоник с помощью полосового фильтра (bandpass filter – BPF), и ей придается форма посредством насыщающего усилителя с передаточной функцией следующего вида
36
1 |
для x 0 |
|
|
. |
|
sgn x |
(2.34) |
1 для других x
|
u(t) |
|||||||||
Входной |
|
|
|
|
|
|
|
|
|
t |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
||
сигнал |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
u(t) |
Выход |
|
согласованного |
t |
фильтра |
|
|
u(t) |
Выход |
|
квадратора |
t |
|
u(t) |
Выход
полосового t фильтра
u(t)
Выход
усилителя t ограничителя
Рис. 2.14 Временные диаграммы процессов в разомкнутом символьном синхронизаторе
Во втором примере (рис. 2.13, б) Фурье-компонент на частоте тактового генератора создается посредством задержки и умножения. Длительность задержки, показанной на рис. 2.13, б, равна половине периода передачи символа, и это значение является оптимальным, поскольку оно дает наибольший Фурье-компонент. Сигнал m(t) всегда будет положительным во второй половине любого периода передачи бита, но будет иметь отрицательную первую половину, если во входном потоке битов s(t) произошло изменение состояния. Это дает прямоугольный сигнал, спектральные компоненты и все гармоники которого совпадают с теми, что были у
37

сигнала в схеме на рис, 2.13, а. Как и ранее, нужный спектральный компонент может быть отделен с помощью полосового фильтра, и ему будет придана нужная форма.
Последний пример (рис. 2.13, в) соответствует контурному детектору. Основными операциями здесь являются дифференцирование и спрямление (посредством использования квадратичного устройства). Если на вход поступает сигнал прямоугольной формы, дифференциатор дает положительные или отрицательные пики на всех переходах символов. При спрямлении получаемая последовательность положительных импульсов будет давать Фурье-компонент на скорости передачи информационных символов. Потенциальной проблемой данной схемы является то, что дифференциаторы обычно весьма чувствительны к широкополосному шуму. Это делает необходимым введение перед дифференциатором фильтра нижних частот (low-pass filter – LPF), как показано на рис. 2.13, в. В то же время данный фильтр удаляет высокочастотные составляющие информационных символов, что приводит к потере сигналом исходной прямоугольной формы. Это, в свою очередь, приводит к тому, что результирующий дифференциальный сигнал будет иметь конечные времена нарастания и спада и уже не будет последовательностью импульсов.
Очевидно, что с этапами обработки сигналов, изображенными на рис. 2.13, будет связана некоторая аппаратная задержка. Для полосового фильтра, эффективно усредняющего К входных символов (ширина полосы = 1/КТ), величина частичного среднего времени (задержки) приблизительно описывается следующим выражением
|
|
|
|
|
|
0,33 |
|
для |
Eb |
5, |
K 18. |
(2.35) |
|
|
|
|
|||||||||
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|||||
|
|
T |
|
|
|
KEb / N0 |
|
|
N0 |
|
|
|
Здесь Т – период передачи символа, Еь – детектируемая энергия на бит, a N0
– односторонняя спектральная плотность мощности принятого шума. При высоких отношениях сигнал/шум частичное отношение среднеквадратического отклонения временной ошибки дается следующим выражением:
|
|
0,411 |
|
для |
Eb |
1. |
(2.36) |
|
|
|
|
||||
|
|||||||
T |
KEb / N0 |
|
|
N0 |
|
||
Таким образом, если для полосового фильтра отношение сигнал/шум во входном сигнале достаточно велико, все методы, приведенные на рис. 2.13, приведут к точной символьной синхронизации.
Основным недостатком разомкнутых символьных синхронизаторов является наличие неустранимой ошибки сопровождения с ненулевым средним. Эту ошибку можно уменьшить при больших отношениях сигнал/шум.
Замкнутые символьные синхронизаторы сравнивают входной сигнал с локально генерируемыми тактовыми импульсами с последующей
38
синхронизацией локального сигнала с переходами во входном сигнале. Примером такой системы является устройство символьной синхронизации с применением фазовой автоподстройки частоты генератора тактовой частоты приемного оборудования рис. 2.15.
s(t) |
|
2 |
|
ФНЧ |
d dt |
ФНЧ |
|
|
|
FT |
Ген |
|
|
|
ГУН |
Рис. 2.15 |
Замкнутая система символьной синхронизации |
||
Двуполярный линейный цифровой сигнал s(t) ЛЦС (сигнал основной полосы) дифференцируется в дифференцирующем устройстве d dt и
dt и
выпрямляется в двухполупериодном выпрямителе 2 , на выходе которого
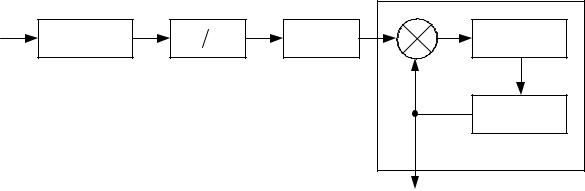
появляются импульсы, соответствующие переходам от «0» к « 1» и от « 1» к «0». Эти импульсы подаются на перемножитель фазового детектора ФД, состоящего из перемножителя и ФНЧ. На выходе ФД появляется напряжение, соответствующее расхождению тактовых частот принимаемого сигнала и местного генератора Ген. После фильтрации высокочастотных продуктов перемножения в фильтре нижних частот ФНЧ фазового детектора, управляющее напряжение подается на генератор и изменяет его тактовую частоту. Так осуществляется фазовая автоподстройка тактовой частоты местного генератора Ген под тактовую частоту принимаемого сигнала. Местный генератор тактовой частоты с петлей фазовой автоподстройки частоты получил название генератора управляемого напряжением ГУН (voltage controlled oscillator – VCO).
Среди наиболее популярных замкнутых символьных синхронизаторов можно выделить синхронизатор с опережающим и запаздывающим стробированием (early/late-gate synchronizer) Пример такого синхронизатора схематически изображен на рис. 2.16.
39
Задний
полустроб
T |
y1 |
Абсолютное |
|
y1 |
|
|
|
|
|||||
dt |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
значение |
|
|
|
|
d |
|
|
|
|
|
|
|
|
|
|
|
|
|
s(t) |
|
|
|
|
|
d |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y2 |
|
|
|
y1 |
|
|
|
|
|
|
|
|
|
|
|||||||
Ген |
|
ФНЧ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||

|
T d |
y2 |
Абсолютное |
|
y2 |
|
|
|
|
|
|||||
|
dt |
|
|
|
|
|
|
|
|
|
значение |
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Передний |
|
|
|
|
|
|
|
полустроб |
|
|
|
|
|
|
|
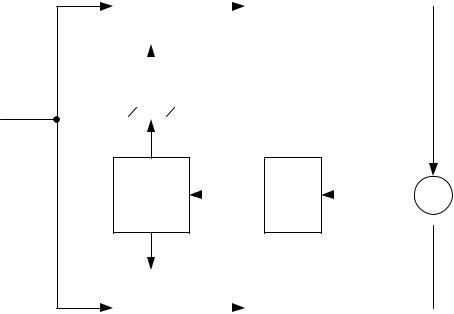
Рис. 2.16 Замкнутый символьный синхронизатор с опережающим и запаздывающим стробированием
Его работа заключается в выполнении двух отдельных интегрирований энергии входного сигнала по двум различным промежуткам символьного интервала длительностью (Т- d) секунд. Первое интегрирование (опережающее) начинается в момент, определенный как начало периода передачи символа (условно
– момент времени 0), и заканчивается через (T-d) секунд. Второе интегрирование (запаздывающее) начинается с задержкой на d секунд и заканчивается в конце периода передачи символа (условно – момент времени Т). Разность абсолютных значений выходов описанных интеграторов y1 и y2 является мерой ошибки
синхронизации символов приемника и может подаваться обратно для последующей коррекции местоположения стробирующего импульса.
Работа синхронизатора с опережающим и запаздывающим стробированием представлена на рис. 2.17. При идеальной синхронизации (рис. 2.17, а) показано, что оба периода стробирования попадают в интервал передачи символа. В этом случае оба интегратора получат одинаковый объем энергии сигнала и разность соответствующих сигналов (сигнал рассогласованияна рис. 2.16) будет равна нулю.
Следовательно, если устройство синхронизировано, оно стабильно; нет тенденции к самопроизвольному выходу из синхронизации. На рис. 2.17, б
40