

637_Nosov_V.I._Seti_radiodostupa_CH.2_
.pdfТаблица 5.3 Выигрыш по полосе при М позиционной модуляции
М |
2 |
4 |
8 |
16 |
32 |
64 |
128 |
256 |
512 |
Kпш |
0 |
3,01 |
4,77 |
6,02 |
7,0 |
7,78 |
8,45 |
9,03 |
9,54 |
Используя данные таблиц 5.1 – 5.3 можно определить энергетический выигрыш (проигрыш) М позиционных методов модуляции друг относительно друга.
Зависимость вероятности ошибки от отношения сигнал-шум, рассчитанные по (5.23, 5.24) для М-ФМ приведены в таблице 5.4 и на рисунке 5.5, а рассчитанные по (5.16, 5.17) для М-КАМ приведены в таблице 5.5 и на рисунке 5.6.
Таблица 5.4 Зависимость pош |
от отношения сигнал/шум при М-ФМ |
||||||||||||
|
|
|
|
|
|
|
|
М |
|
|
|
||
pош |
2 |
|
4 |
|
|
|
8 |
|
16 |
32 |
|||
10-4 |
|
8,32 |
|
11,32 |
|
|
16,39 |
|
22,1 |
27,92 |
|||
10-5 |
|
9,54 |
|
12,54 |
|
|
17,66 |
|
23,3 |
29,25 |
|||
10-6 |
|
10,5 |
|
13,5 |
|
|
18,5 |
|
24,27 |
30,1 |
|||
10-7 |
|
11,28 |
|
14,28 |
|
|
19,28 |
|
25,05 |
30,9 |
|||
10-8 |
|
11,94 |
|
14,94 |
|
|
19,94 |
|
25,71 |
31,54 |
|||
10-9 |
|
12,51 |
|
15,51 |
|
|
20,51 |
|
26,28 |
32,11 |
|||
Таблица 5.5 Зависимость pош |
от отношения сигнал/шум при М-КАМ |
||||||||||||
|
|
|
|
|
|
|
|
М |
|
|
|
||
pош |
|
16 |
32 |
|
64 |
|
128 |
|
256 |
|
512 |
||
10-4 |
|
18,15 |
21,84 |
|
24,39 |
|
27,95 |
30,45 |
|
34,0 |
|||
10-5 |
|
19,4 |
23,09 |
|
25,64 |
|
29,2 |
31,53 |
|
35,24 |
|||
10-6 |
|
20,36 |
24,01 |
|
26,6 |
|
30,16 |
32,66 |
|
36,2 |
|||
10-7 |
|
21,19 |
24,88 |
|
27,43 |
|
31,0 |
33,49 |
|
37,03 |
|||
10-8 |
|
21,87 |
25,56 |
|
28,11 |
|
31,67 |
34,17 |
|
37,71 |
|||
10-9 |
|
22,44 |
26,13 |
|
28,68 |
|
32,24 |
34,14 |
|
38,28 |
|||
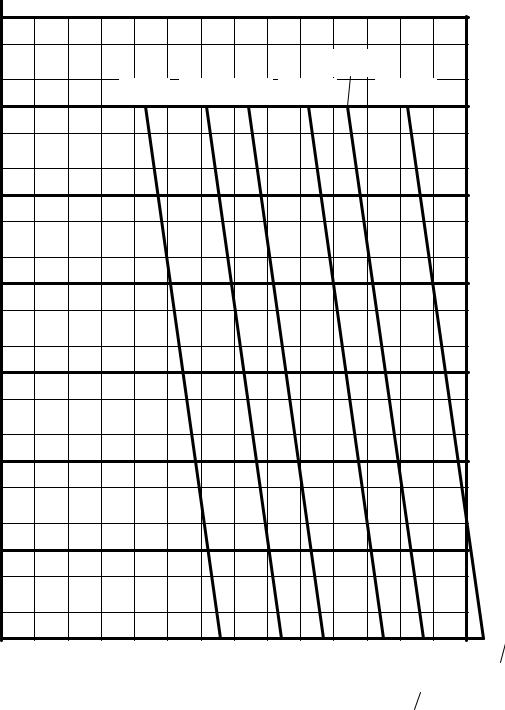
Из таблиц 5.4 и 5.5 видно также, что при М-ФМ увеличение кратности модуляции в два раза приводит к проигрышу в отношении сигнал-шум примерно на 5,5 дБ, в то время как при М-КАМ этот проигрыш составляет только порядка 3,5 дБ.
Для получения графика зависимости вероятности ошибки от отношения Eb  N0 из таблиц 5.4, 5.5 и рисунков 5.5, 5.6 достаточно учесть выигрыш по
N0 из таблиц 5.4, 5.5 и рисунков 5.5, 5.6 достаточно учесть выигрыш по
полосе Kпш (5.27) при М позиционной модуляции.
161
PB |
|
|
|
|
|
|
|
|
|
|
|
|
|
10 3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
M=2 |
|
M=4 |
|
M=8 |
|
|
M=16 |
|
M=32 |
|
|
|
|
|
|
|
|
|
|
|
||||||
10 4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
10 5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
10 6 |
|
|
|
|
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
10 7 |
|
|
|
|
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
10 8 |
|
|
|
|
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
10 9 |
|
|
|
|
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
10 10 |
|
|
|
|
|
|
|
|
|
|
|
|
32 Pc Pш , дБ |
6 |
8 |
10 |
12 |
14 |
16 |
18 |
20 |
22 |
24 |
26 |
28 |
30 |
|
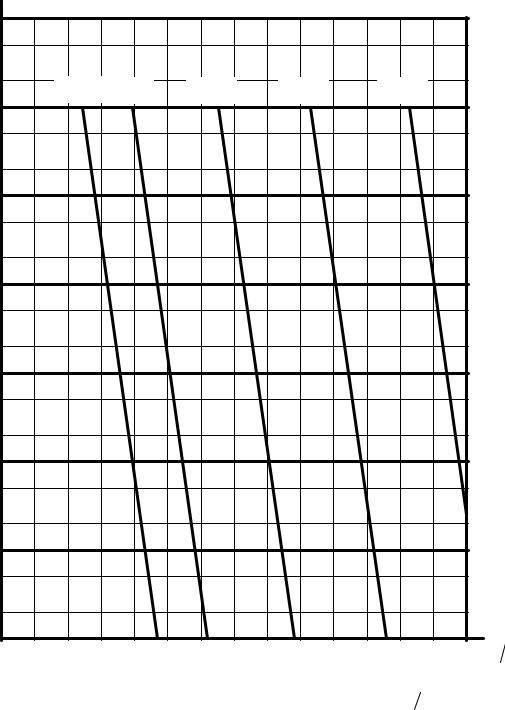
Рис. 5.7 Зависимость вероятности ошибки PB от отношения |
Pc |
Pш |
для M-PSK |
||||||||||
|
|
|
|
|
|
|
162 |
|
|
|
|
|
|
PB |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
10 3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M=256 |
|
|
|
|
|
2 |
|
|
M=16 |
M=32 M=64 |
M=128 |
|
M=512 |
|
||||||
10 4 |
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
10 5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
10 6 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
10 7 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
10 8 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
10 9 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
10 10 |
|
|
|
|
|
|
|
|
|
|
|
|
|
38 Pc Pш , дБ |
12 |
14 |
16 |
18 |
20 |
22 |
24 |
26 |
28 |
30 |
32 |
|
34 |
36 |
|
Рис. 5.7 Зависимость вероятности ошибки PB от отношения |
Pc |
Pш |
для M-QAM |
|||||||||||
|
|
|
|
|
|
|
163 |
|
|
|
|
|
|
|

Например, для 4-ФМ вероятность ошибки pош 10 4 получается при
отношении сигнал-шум P P 11,32 дБ. Эта же |
вероятность ошибки |
||||
с ш |
|
|
|
|
|
получается при отношении энергии на бит к спектральной мощности шума |
|||||
|
Eb |
|
Pc |
КПШ 8,31дБ. |
(5.28) |
|
No |
|
|||
|
|
Pш |
|
||
По приведенной выше методике был произведен перерасчет и получены значения вероятности ошибки от отношения энергии бита к спектральной плотности мощности шума Eb  N0 . Результаты расчетов для М-ОФМ и М-КАМ
N0 . Результаты расчетов для М-ОФМ и М-КАМ
приведены в таблицах 5.6 и 5.7.
Таблица 5.6 Зависимость pош |
от отношения Eb |
N0 при М-ФМ |
|
|||||
|
|
|
|
М |
|
|
|
|
pош |
2 |
4 |
|
8 |
|
16 |
|
32 |
10-4 |
8,32 |
8,32 |
|
11,62 |
|
16,08 |
|
20,92 |
10-5 |
9,54 |
9,54 |
|
12,89 |
|
17,28 |
|
22,25 |
10-6 |
10,5 |
10,5 |
|
13,73 |
|
18,25 |
|
23,1 |
10-7 |
11,28 |
11,28 |
|
14,51 |
|
19,03 |
|
23,9 |
10-8 |
11,94 |
11,94 |
|
15,17 |
|
19,69 |
|
24,54 |
10-9 |
12,51 |
12,51 |
|
15,74 |
|
20,26 |
|
25,11 |
Таблица 5.7 Зависимость pош |
от отношения Eb |
N0 при М-КАМ |
|
|||||||
|
|
|
|
|
М |
|
|
|
|
|
pош |
16 |
32 |
|
64 |
|
128 |
|
256 |
|
512 |
10-4 |
12,13 |
14,84 |
|
16,61 |
|
19,5 |
|
21,42 |
|
24,46 |
10-5 |
13,38 |
16,09 |
|
17,86 |
|
20,75 |
|
22,5 |
|
25,7 |
10-6 |
14,34 |
17,01 |
|
18,82 |
|
21,71 |
|
23,63 |
|
26,66 |
10-7 |
15,17 |
17,88 |
|
19,65 |
|
22,55 |
|
24,46 |
|
27,49 |
10-8 |
15,85 |
18,56 |
|
20,33 |
|
23,22 |
|
25,14 |
|
28,17 |
10-9 |
16,42 |
19,13 |
|
20,9 |
|
23,79 |
|
26,11 |
|
28,74 |
Зависимости вероятности ошибки от Eb  N0 для М-ОФМ (M-PSK) и М-
N0 для М-ОФМ (M-PSK) и М-
КАМ (M-QAM), полученные на модели системы радиосвязи в Matlab , приведены на рис.5.7 и 5.8.
164
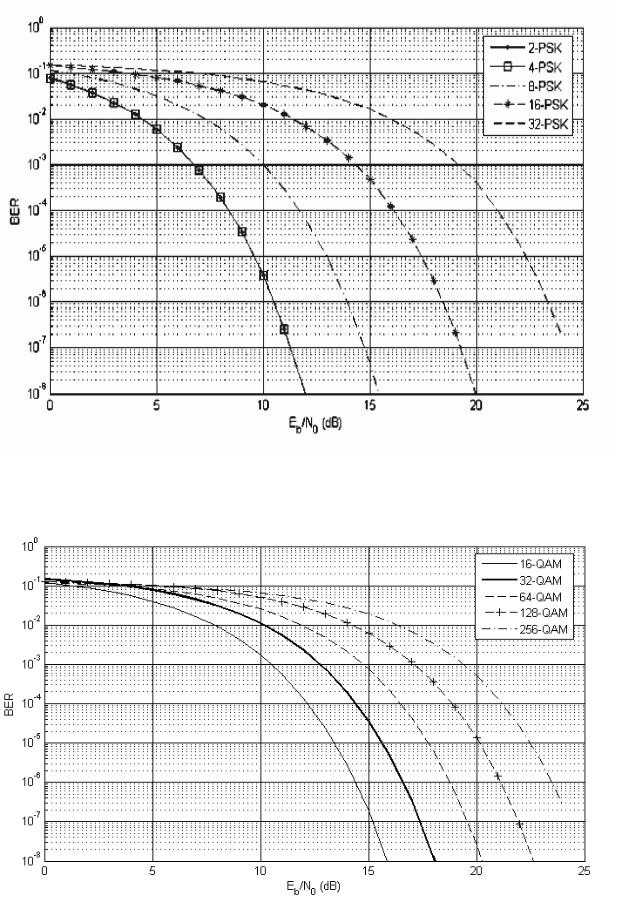
Рис. 5.7 Зависимость вероятности ошибки (BER) от отношения Eb  N0 для
N0 для
M-PSK
Рис. 5.8 Зависимость вероятности ошибки (BER) от отношения Eb  N0 для
N0 для
M-QAM
165

На рис. 5.9 приведены зависимости вероятности ошибки от Eb  N0 для М-
N0 для М-
ОФМ (M-PSK) и М-КАМ (M-QAM) при М = 16 и 32. Из этого рисунка следует, что при одинаковой позиционности схемы с М-КАМ (M-QAM) обладают более высокой помехоустойчивостью, по сравнению со схемами М-ОФМ (M-PSK). Это подтверждает результаты полученные в таблице 5.1, из которой следует, что при одинаковой позиционности модуляции М = 16 и 32 сигнальные точки на созвездии М-КАМ (M-QAM) имеют большее расстояние ошибок (евклидово расстояние), чем при М-ОФМ (M-PSK).
5.2.1 Схемы BPSK и QPSK имеют одинаковые вероятности ошибки
Из таблицы 5.6 следует, что вероятность ошибки от Eb  N0 для 2-ОФМ
N0 для 2-ОФМ
(BPSK) и 4-ОФМ (QPSK) совпадают. Этот результат получен на основе выражений (5.27) и (5.28). Этот факт можно объяснить и следующим образом.
Соотношение между отношениями мощности сигнала к мощности шума
Pc Pш и энергии бита к спектральной плотности мощности шума Eb |
N0 можно |
|||||||
записать следующим образом |
|
|
|
|
|
|
||
|
Eb |
|
Pc |
|
П |
|
, |
(5.29) |
|
|
|
||||||
|
|
|
|
|||||
|
N0 |
Pш |
Rb |
|
|
|||
Здесь Pc – средняя мощность сигнала, П – полоса, занимаемая сигналом, Rb – скорость передачи битов.
Рис. 5.9 Зависимость вероятности ошибки (BER) от отношения Eb  N0 для
N0 для
M-PSK и M-QAM
166
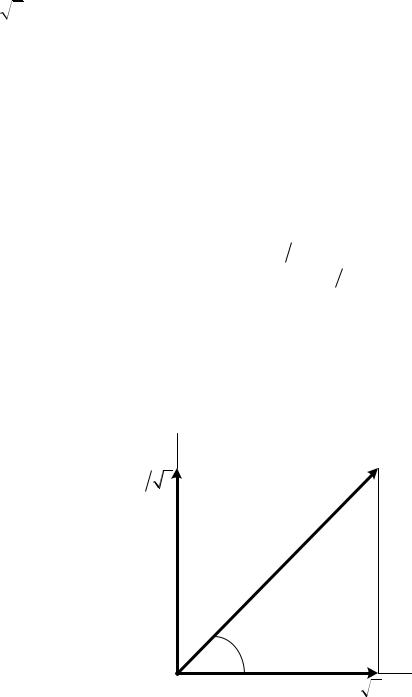
Схему QPSK можно представить с помощью двух ортогональных каналов BPSK (см. рис. 3.12 в разделе 3). Поток входных битов QPSK обычно разбивается на четный и нечетный (синфазный и квадратурный) потоки символов. Каждый новый поток символов модулирует синфазный и квадратурный компоненты несущей со скоростью, вдвое меньшей скорости исходного потока битов. Синфазный поток модулирует член cos 0t , а квадратурный – член sin 0t . Если
амплитуда исходного вектора QPSK была равна А, то амплитуды векторов синфазного и квадратурного компонентов равны, как показано на рис. 5.10,
A

 2 .
2 .
Следовательно, на каждый квадратурный сигнал BPSK приходится половина средней мощности исходного сигнала QPSK. Значит, если исходный сигнал QPSK имел скорость Rb бит/с и среднюю мощность сигнала Pc Вт,
квадратурное разбиение приводит к тому, что каждый сигнал BPSK имеет символьную скорость передачи Rs Rb  2 бит/с и среднюю мощность Pc
2 бит/с и среднюю мощность Pc  2 Вт.
2 Вт.
Следовательно, отношение Eb  N0 , характеризующее оба
N0 , характеризующее оба
ортогональных канала BPSK, создающих сигнал QPSK, эквивалентно отношению Eb  N0 в уравнении (5.29), поскольку его можно записать точно так
N0 в уравнении (5.29), поскольку его можно записать точно так
же
Eb |
|
Pc 2 |
|
П |
|
|
|
Pc |
|
П |
|
|
|
|
|
|
. |
(5.30) |
|||||||
|
|
|
|
|
|
|||||||
N0 |
|
N0 |
Rb |
2 |
|
|
N0 |
Rb |
|
|||
Таким образом, каждый из ортогональных каналов BPSK, а, следовательно, и составной сигнал QPSK характеризуются одним отношением, а значит – такой же вероятностью PB , что и сигнал BPSK. Ортогональность
(разность фаз 90°) соседних символов QPSK приводит к равным вероятностям появления ошибочного бита для схем BPSK и QPSK. Следует отметить, что вероятности появления ошибочного символа для этих схем не равны.
sin 0t

 QPSK
QPSK
A 
 2
2
Квадратурный |
A |
компонент BPSK |
|
45
cos 0t
Синфазный A

 2 компонент BPSK
2 компонент BPSK
Рис. 5.10 Синфазный и квадратурный компоненты (модуляция
BPSK) вектора QPSK
167
Контрольные вопросы
1.Поясните принцип работы М-КАМ демодулятора
2.Поясните работу системы тактовой синхронизации в КАМ демодуляторе
3.Поясните принцип работы АЦП в КАМ демодуляторе
4.Поясните обеспечение автоматических регулировок в КАМ демодуляторе
5.Определение вероятности ошибочного приема при М-ФМ
6.Определение вероятности ошибочного приема при М-КАМ
7.Поясните различие в определении вероятности ошибки в зависимости от отношения сигнал/шум и от отношения энергии бита к мощности шума
168
6 КОДИРОВАННАЯ МОДУЛЯЦИЯ
Достаточно часто при разработке систем связи для получения большого выигрыша от применения различных схем кодирования и модуляции используют схемы кодирования с учетом расположения сигнальных точек модулированного сигнала на фазово-амплитудной плоскости. Такие совместные конструкции схем кодирования и модуляции иногда называют «кодемы».
Цели разработчика систем связи.
Системные компромиссы – это неотъемлемая часть всех разработок цифровых систем связи. Разработчик должен стремиться к:
1)увеличению скорости передачи бит R до максимально возможной;
2)минимизации вероятности появления битовой ошибки pb ;
3)минимизации потребляемой мощности, или, что то же самое, минимизации требуемого отношения энергии одного бита к спектральной плотности мощности шума Eb  N0 ;
N0 ;
4)минимизации ширины полосы пропускания П;
5)максимизации эффективности использования системы, т.е. к обеспечению надежного обслуживания для максимального числа пользователей с минимальными задержками и максимальной устойчивостью к возникновению конфликтов;
6)минимизации конструктивной сложности системы, вычислительной нагрузки и стоимости системы.
Конечно, разработчик системы может попытаться удовлетворить всем требованиям одновременно. Однако очевидно, что требования 1 и 2 противоречат требованиям 3 и 4; они предусматривают одновременное
увеличение скорости R и минимизацию pb , Eb  N0 , W . Существует несколько
N0 , W . Существует несколько
сдерживающих факторов и теоретических ограничений, которые неизбежно влекут за собой компромиссы в любых системных требованиях:
1.Минимальная теоретически требуемая ширина полосы частот по Найквисту;
2.Теорема о пропускной способности Шеннона-Хартли (и предел Шеннона);
3.Государственное регулирование (например, распределение частот);
4.Технологические ограничения (например, современные комплектующие);
5.Другие системные требования
Некоторые реализуемые компромиссы между кодированием и модуляцией можно лучше показать через изменение положения рабочей точки на одной из двух плоскостей – характеристике вероятности появления ошибки и характеристике эффективности использования полосы частот.
Характеристика вероятности появления ошибки.
169

На рис. 6.1 показаны семейства кривых зависимости Pb от Eb  N0 для когерентного детектирования многофазных сигналов. Для представления каждой k - битовой последовательности модулятор использует один из M 2k сигналов, где М — размер набора символов.
N0 для когерентного детектирования многофазных сигналов. Для представления каждой k - битовой последовательности модулятор использует один из M 2k сигналов, где М — размер набора символов.
с
а
2
1
d
б
e |
3 |
f |
Рис. 6.1 Зависимость появления битовой ошибки от Eb  N0 для многофазных сигналов
N0 для многофазных сигналов
На рис. 6.1 показано повышение частоты появления ошибок с увеличением k (или М) при передаче неортогональных сигналов. Для наборов неортогональных сигналов, таких как сигналы многофазной манипуляции (multiple phase shift keying – MPSK), расширение набора символов может снизить требования к полосе пропускания за счет повышения PB , или
требуемого значения Eb  N0 . Далее эти семейства кривых будут называться
N0 . Далее эти семейства кривых будут называться
кривыми характеристик вероятности появления ошибок, а плоскость, в которой они лежат, – плоскостью вероятности появления ошибок. Такие характеристики показывают, где может располагаться рабочая точка для конкретных схем модуляции и кодирования.
Для системы с данной скоростью передачи информации каждую кривую на плоскости можно связать с различными фиксированными значениями минимально необходимой полосы пропускания, а значит, некое множество кривых можно представить как множество кривых равной полосы пропускания. При передвижении по кривой в направлении возрастания ординаты, ширина
170