

637_Nosov_V.I._Seti_radiodostupa_CH.2_
.pdf&
1
x1
&
&
z1
&
1
x2
&
&
1
y1
&
&
z2
&
1
y2
&
Рис. 3.37 Функциональная схема устройства вычитания по модулю 4
101
Контрольные вопросы
1.Поясните работу двухпозиционного фазового модулятора.
2.Как определяется полоса частот и спектральная эффективность сигнала с двухпозиционной фазовой модуляцией.
3.Поясните работу когерентного демодулятора сигнала с двухпозиционной фазовой модуляцией.
4.Назовите способы формирования опорного сигнала в фазовом демодуляторе.
5.Поясните назначение относительного (дифференциального) кодирования и декодирования цифрового сигнала при фазовой модуляции.
6.Поясните работу дифференциального (корреляционного) демодулятора сигналов с двухпозиционной фазовой модуляцией.
7.Поясните работу модулятора 4-ОФМ.
8.Как определяется полоса частот и спектральная эффективность сигнала с четырехпозиционной фазовой модуляцией.
9.Чем отличается четырехпозиционная фазовая модуляция со сдвигом (4-ОФМС) от обычной 4-ОФМ.
10.Поясните работу модулятора  4 DQPSK .
4 DQPSK .
11.Поясните работу когерентного демодулятора сигнала с четырехпозиционной фазовой модуляцией.
12.Поясните работу модулятора 8-ОФМ.
13.Как определяется полоса частот и спектральная эффективность сигнала с восьмипозиционной фазовой модуляцией.
14.Поясните работу когерентного демодулятора сигнала с восьмипозиционной фазовой модуляцией.
15. Восстановление несущей частоты (опорного сигнала) при М-ОФМ.
102
4 МНОГОПОЗИЦИОННАЯ КВАДРАТУРНАЯ АМПЛИТУДНАЯ МОДУЛЯЦИЯ
4.1 Общие принципы получения сигналов М-КАМ
При кратности многопозиционной фазовой модуляции M 8 помехоустойчивость приема значительно ухудшается, что привело к необходимости поиска новых многопозиционных методов модуляции для обеспечения высокой частотной эффективности.
Таким методом модуляции стала многопозиционная амплитудно-фазовая модуляция М-АФМ (M-APSK), которая чаще всего используется в виде квадратурной реализации модулятора, что сводит этот вид модуляции к М- позиционной фазовой и М-уровневой амплитудной модуляции синфазного и квадратурного каналов. При такой реализации этот вид модуляции получил название квадратурная амплитудная модуляция М–КАМ (M-QAM).
М-КАМ обеспечивает хорошую частотную эффективность, т.е. позволяет уменьшить полосу частот, занимаемую модулированным сигналом. При М- арной манипуляции используется не бинарный алфавит с передачей одного информационного бита за период передачи канального символа, а алфавит из М символов, что позволяет передавать k log2 M битов за каждый символьный
интервал. Поскольку использование М-арных символов в k раз повышает скорость передачи информации, при неизменной полосе занимаемой модулированным сигналом, то при фиксированной скорости применение М- арной модуляции сужает необходимую полосу пропускания в k раз.
Если сравнить минимальное расстояние между сигнальными точками для М-ФМ и М-КАМ то окажется, что при М-КАМ это расстояние существенно больше, что и обеспечивает этому виду модуляции более высокую помехоустойчивость.
Исходя из приведенных рассуждений сигнал М-КАМ можно записать в следующем виде
|
|
s(t) A |
(t)cos t |
(t) A (t)cos t |
Q |
(t) |
|||||
|
|
I |
0 |
I |
|
Q |
0 |
|
|
|
|
|
Ai (t)cos(2 f0t i (t)), |
|
|
|
|
|
(4.1) |
||||
|
|
|
|
|
|
|
|||||
где |
AI (t), I (t) |
и AQ (t), Q (t) – изменение амплитуды и фазы сигнала в |
|||||||||
синфазном и квадратурном каналах, соответственно; Ai (t) и i (t) |
– изменение |
||||||||||
амплитуды и фазы сигнала на выходе модулятора. |
|
|
|
|
|
||||||
В самом общем виде можно образовать определенную комбинацию М1 – |
|||||||||||
уровневой |
АМ и |
М2 |
– позиционной |
ФМ, |
чтобы |
сконструировать |
|||||
комбинированное АМ-ФМ сигнальное |
созвездие, содержащее М = М1 М2 |
|||
точек пространства сигналов. Если |
M 2n |
и M |
2 |
2m , то сигнальное |
|
1 |
|
|
|
103 |
|
|
|
|
созвездие комбинированной АМ-ФМ сводится к передаче m n log M1 M2 двоичных символов, следующих со скоростью Rb  (m n) , где Rb – битовая
(m n) , где Rb – битовая
скорость цифрового потока на входе модулятора.
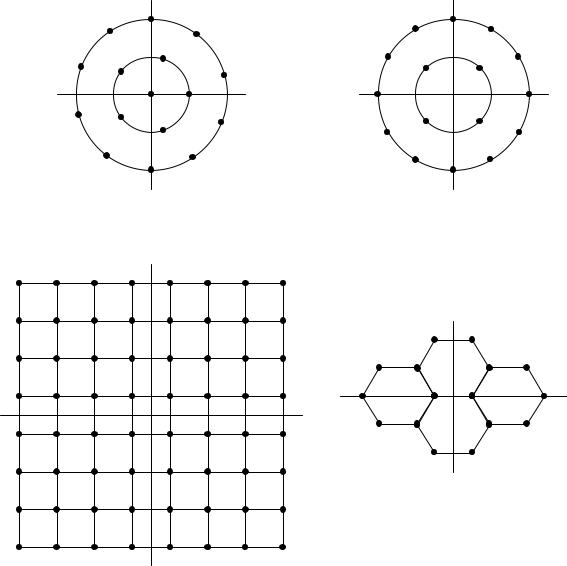
Исследователями было изучено большое количество возможных множеств сигналов М-КАМ – циклических (круговых), прямоугольных (квадратных и крестообразных) и гексагональных. На рис. 4.1 приведены примеры множеств сигналов для 16-КАМ.
Q Q
I |
I |
Циклическое (5,11) |
Циклическое (4,12) |
Q
|
Q |
I |
I |
|
Гексогональное |
Прямоугольное
Рис. 4.1 Примеры созвездий сигналов для 16-КАМ
В двухмерном пространстве сигналов оптимальная граница, окружающая массив точек, стремится к окружности, однако квадратная граница дает
104
ухудшение характеристик (например, средней энергии сигналов) всего на 0,2 дБ относительно кольцевой. В двухмерном пространстве наиболее плотной решеткой является гексагональная рис. 1.1 и результат замены прямоугольной (квадратной) решетки на гексагональную дает экономию средней энергии 0,6 дБ. А так как реализация квадратной границы оказывается проще, чем кольцевой и гексагональной, то чаще всего используется именно квадратная граница. Так, из рис. 4.1 следует, что при кольцевой границе необходимо иметь по каждому из каналов I и Q десять значений уровней, а при квадратной
границе – только восемь.
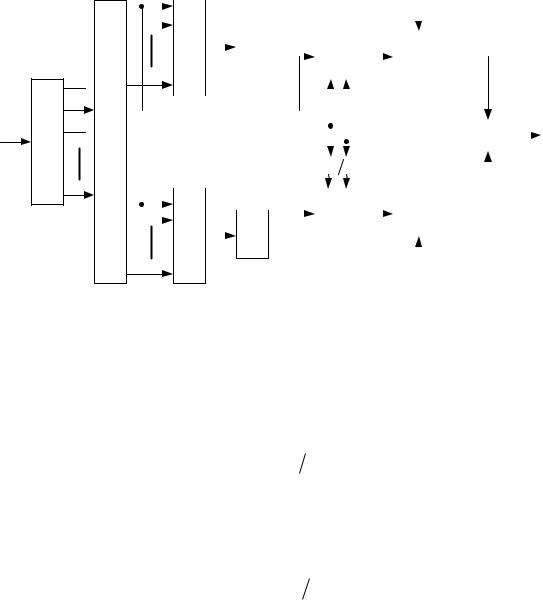
Структурная схема модулятора М-КАМ приведена на рис. 4.2.
FTs
Цифровой d1 сигнал d2 
FTb S P d3
P d3
Tb
dk
Ts
Размещение
i1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i2 |
|
|
|
Is |
(t) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
ЦАП |
|
ФНЧ |
|
|
|
|
|
|
|
|
|
|
|||
in |
|
|
|
|
|
|
2-ФМI |
|
|
АМI |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
cos0t |
s(t) |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
Ген. |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
sin |
0t |
|
|
|
|||||||
|
q1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
q2 |
|
Qs (t) |
|
|
|
|
|
|
|
|
2-ФМQ |
|
|
|
АМQ |
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
ФН |
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
ЦАП |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
Ч |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
qn
Рис. 4.2 Модулятор М-КАМ
На вход модулятора поступает цифровой поток бит со скоростью R бит/с и параметрами
|
|
FT 1 Tb , |
|
(4.2) |
||
|
|
|
b |
|
|
|
где FT |
– тактовая частота следования бит, Tb – длительность бита. |
|||||
b |
|
|
|
|
|
|
Этот цифровой поток разделяется на k потоков d1,d2 ,...,dk символов |
||||||
|
k log2 M , |
FT |
FT |
k, |
Ts k Tb , , |
(4.3) |
|
|
s |
b |
|
|
|
где M |
– позиционность |
модуляции, |
FT ,Ts – тактовая |
частота и |
||
s
длительность символа, соответственно.
105
|
В таблице 4.1 приведены значения k |
для |
разной |
позиционности |
|||||||||||||
модуляции. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 4.1 Значения параметра k |
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
Позиционность модуляции, |
M |
|
|
|
|
|
||||||
|
4 |
8 |
16 |
|
32 |
64 |
|
128 |
256 |
|
512 |
1024 |
|
2048 |
4096 |
|
|
k |
2 |
3 |
4 |
|
5 |
6 |
|
7 |
8 |
|
|
9 |
10 |
|
11 |
12 |
|
|
Далее |
необходимо |
произвести |
распределение |
k двоичных |
потоков |
|||||||||||
символов в сигнальных точках на фазово-амплитудной плоскости (созвездии) М-позиционного модулятора. Для этого k двоичных цифровых потоков символов в устройстве размещения модулятора преобразуются путем операции размещения в n потоков символов i1,i2 ,...,in , которые используются для
амплитудной и фазовой модуляции синфазной составляющей несущего колебания модулятора, и в n потоков символов q1,q2 ,...,qn , которые
используются для амплитудной и фазовой модуляции квадратурной составляющей несущего колебания модулятора рис. 1.2. Количество потоков символов n на выходе устройства размещения определяется из уравнения
|
|
|
n |
k |
, |
при k четном; |
|
n |
k 1 |
, |
при k нечетном. |
(4.4) |
||||||||
|
|
|
|
|
|
|
||||||||||||||
|
|
|
2 |
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
||
|
В таблице 4.2 приведены значения |
n для |
различной |
позиционности |
||||||||||||||||
модуляции. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 4.2 Значения n для различных М-КАМ. |
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
Позиционность модуляции, M |
|
|
|
|
|
|
||||||||
|
4 |
8 |
16 |
|
32 |
64 |
|
128 |
256 |
512 |
1024 |
|
2048 |
|
4096 |
|
||||
n |
1 |
2 |
2 |
|
3 |
3 |
|
4 |
4 |
5 |
|
5 |
|
6 |
|
6 |
|
|||
|
Полученные на выходе устройства размещения |
n |
потоков символов в |
|||||||||||||||||
синфазном канале |
i1,i2 ,...,in и в квадратурном канале |
q1,q2 ,...,qn поступают в |
||||||||||||||||||
цифроаналоговые преобразователи ЦАП. В цифроаналоговых преобразователях
каждые n потоков символов преобразуются в N |
– уровневые аналоговые |
сигналы NI и NQ . Как следует из уравнения (4.3) k |
потоков символов должны |
обеспечить формирование на фазово-амплитудной плоскости модулятора |
|
M 2k |
(4.5) |
сигнальных точек.
Для четного значения k в модуляторе рис. 4.2 формируется квадратное множество сигнальных точек (созвездие), при этом количество уровней сигналов в синфазном и квадратурном каналах равно
106
|
|
|
|
|
|
|
|
|
N |
I |
N |
Q |
2n 2k 2 |
M . |
(4.6) |
||
|
|
|
|
|
|
|
||
Чтобы обеспечить равномерное (эквидистантное) распределение сигнальных точек в созвездии, значения уровней сигналов в синфазном и квадратурном каналах принимаются равными
Uвых ЦАП 1, |
3,..., 2n 1 или |
|
1 |
(4.7) |
|
M |
|||||
|
|
|
|
|
|
Для нечетного значения k |
в модуляторе рис. 4.2 |
формируется |
|||
крестообразное симметричное множество сигнальных точек (созвездие), при этом количество уровней сигналов в синфазном и квадратурном каналах равно
N |
I |
N |
Q |
2n 2k n 1. |
(4.8) |
|
|
|
|
Чтобы обеспечить равномерное (эквидистантное) распределение сигнальных точек в созвездии, значения уровней сигналов в синфазном и квадратурном каналах при нечетном n принимаются равными
Uвых ЦАП 1, |
3,..., 2n 2k n 1 |
1 |
(4.9) |
|
|
|
|
В таблице 4.3 приведены значения уровней сигналов рассчитанные по
(4.2) – (4.8) |
для различной позиционности модуляции M . |
|
|
|
|||||||||||||||
Таблица 4.3 Значения числа уровней сигналов для различных М-КАМ. |
|||||||||||||||||||
|
|
|
|
|
|
|
|
Позиционность модуляции, M |
|
|
|
||||||||
|
|
4 |
|
8 |
|
16 |
|
32 |
64 |
|
128 |
|
256 |
|
512 |
|
1024 |
2048 |
4096 |
NI NQ |
|
2 |
|
|
|
4 |
|
6 |
8 |
|
12 |
|
16 |
|
24 |
|
32 |
48 |
64 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Uвых ЦАП макс |
|
1 |
|
|
3 |
|
5 |
7 |
|
11 |
|
15 |
|
23 |
|
31 |
47 |
63 |
|
С выходов ЦАП многоуровневые сигналы |
синфазного Is (t) и |
||||||||||||||||||
квадратурного |
Qs (t) |
каналов |
поступают |
на |
фильтры |
нижних частот |
ФНЧ, |
||||||||||||
которые выполнены в виде фильтров Найквиста и используются для ограничения полосы частот модулирующего сигнала, т.е. для формирования коэффициента скругления (roll off factor) (см. раздел 1.1). Величина коэффициента скругления обычно выбирается в пределах 0,1 0,5.
После ФНЧ многоуровневые сигналы подаются на амплитудные модуляторы синфазного АМI и квадратурного АМQ каналов. На вторые входы
этих модуляторов подаются от генератора сигналы несущей частоты
107
синфазного канала cos 0t |
и квадратурного канала sin 0t промодулированные |
||||
по фазе в двухпозиционных фазовых модуляторах 2 ОФМI |
и |
2 ОФМQ . |
|||
Фазовая модуляция |
на |
180 |
в синфазном канале |
0 |
или 180 , в |
квадратурном канале 90 |
или |
270 |
осуществляется первым из n цифровых |
||
потоков символов в каждом из квадратурных каналов. Необходимо отметить, что посредством двухпозиционной фазовой модуляции осуществляется передача знака уровней. Так, при передаче уровня со знаком плюс используется значение фазы 0 в синфазном канале и 90 в квадратурном канале, а при передаче уровня со знаком минус используется значение фазы 180 в синфазном канале и 270 в квадратурном канале. По этой причине алгоритм работы ЦАП составляется таким образом, чтобы при изменении символа в первом из n двоичных потоков символов на выходе ЦАП изменялся знак при соответствующем уровне.
При этом на выходах амплитудных модуляторов получаются квадратурные сигналы промодулированные по амплитуде и фазе. После суммирования этих сигналов на выходе модулятора получается сигнал М-КАМ, количество сигнальных точек, на созвездии которого при четном k соответствует квадратному множеству точек и равно в соответствии с (4.5) и
(4.6)
M 2k N |
N |
Q |
(4.10) |
I |
|
|
|
Сигнал М-КАМ при нечетном k так же должен иметь M 2k сигнальных |
|||
точек (по числу двоичных потоков символов, получаемых на выходе последовательно/параллельного преобразователя S / P ), но уже на крестообразном созвездии. В этом случае число сигнальных точек, которое может быть сформировано N – уровневыми сигналами синфазного NI и
квадратурного NQ каналов (квадратное созвездие), превосходит число
сигнальных точек, которые можно сформировать k параллельными потоками символов в устройстве размещения
NI NQ 2k . |
(4.11) |
«Лишние» сигнальные точки, которые могли быть сформированы |
N – |
уровневыми сигналами синфазного NI и квадратурного NQ каналов не могут |
|
быть сформированы и должны быть удалены при формировании в устройстве размещения. Удаляемые сигнальные точки находятся по углам квадратного созвездия, которое после удаления «лишних» сигнальных точек превращается в крестообразное созвездие.
В соответствии с уравнениями (4.8), (4.9) и таблицей 4.3 можно определить общее количество «лишних» точек для М-КАМ при нечетном значении k
108

M |
лишн |
2(k 3). |
(4.12) |
||||||||
|
|
|
|
|
|
|
|
||||
При этом количество «лишних» точек в одном углу будет равно |
|
||||||||||
M |
|
|
|
|
2(k 3) |
. |
|
(4.13) |
|||
лишн1 |
|
||||||||||
|
|
|
|
|
4 |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
Полоса частот, занимаемая сигналом М-КАМ равна |
|
||||||||||
ПМ-КАМ |
|
FT |
(1 ) |
(4.14) |
|||||||
|
b |
. |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
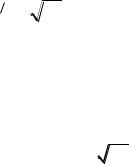
Структурная схема демодулятора М-КАМ приведена на рис. 4.3.
|
|
|
|
1 |
i1 |
|
|
ФД синфазный |
|
2 |
|
|
|
|
i2 |
||
|
|
|
Is |
(t) |
|
|
|
ФНЧ |
АЦП |
||
|
|
|
РУ |
||
|
|
cos0t |
|
NI |
in |
|
|
|
|
|
|
М-КАМ |
|
|
|
FT |
|
|
Uоп |
|
s |
|
|
|
|
|
|
||
|
Ген. |
ВТЧ |
|
|
|
|
|
|
|
||
|
|
2 |
|
1 |
q1 |
|
ФАПЧ |
|
|
||
|
sin 0t |
|
2 |
||
|
|
|
q |
||
|
|
|
|
|
2 |
|
|
ФНЧ |
Qs |
(t) РУ |
АЦП |
|
|
ФД квадратурный |
|
NQ |
qn |
Рис. 4.3 Когерентный демодулятор М-КАМ
Деразмещение
FTS d1
d2 FTb P
FTb P S
S
Tb
dk
TS
С выхода приемника сигнал с М-КАМ поступает на один из входов фазовых детекторов синфазного и квадратурного каналов. На вторые входы этих фазовых детекторов поступают опорные сигналы cos 0t для синфазного
канала и sin 0t для квадратурного канала. Опорный сигнал (восстановленную
несущую) вырабатывает генератор, который с помощью системы синхронизации (петли ФАПЧ) фазируется под фазу входного сигнала М-КАМ.
После фильтрации побочных продуктов перемножения входных и опорных сигналов в фильтрах нижних частот ФНЧ на выходах фазовых
109

детекторов синфазного и квадратурного каналов получаются сигналы основной полосы (base band), в данном случае N – уровневые сигналы Is (t) и Qs (t) .
Переходы между уровнями в N – уровневых сигналах несут информацию о тактовой частоте символов, поэтому они используются в выделителе тактовой частоты символов FTs . Тактовая частота символов подается на решающие
устройства, аналогово-цифровые преобразователи и устройство деразмещения. В решающих устройствах принимается решение о принятом на интервале
текущего символа уровне и это решение в виде одного из N принятых уровней подается на аналогово-цифровые преобразователи. В АЦП каждому из принятых уровней в соответствии с алгоритмом работы АЦП ставятся в соответствие n цифровых потоков в синфазном i1,i2 ,...,in и квадратурном
q1,q2 ,...,qn .
Вустройстве деразмещения каждой из комбинаций n цифровых потоков
всинфазном i1,i2 ,...,in и квадратурном q1,q2 ,...,qn каналах ставится в
соответствии с алгоритмом деразмещения одна из 2k комбинаций k цифровых потоков символов d1,d2 ,...,dk . В параллельно-последовательном
преобразователе k цифровых потоков символов d1,d2 ,...,dk преобразуются в цифровой поток с битовой скоростью Rb k Rs .
Восстановление несущей частоты (опорного сигнала) при М-КАМ производится также как и при М-ОФМ (см. раздел 3.2.5.2.1).
Теперь используем рассмотренные общие принципы для получения характеристик сигналов, например для 16-КАМ (квадратное созвездие) и 32КАМ (крестообразное созвездие).
4.2 Шестнадцатипозиционная КАМ
Структурная схема модулятора 16-КАМ приведена на рис. 4.4, а временные диаграммы его работы на рис. 4.5.
На вход модулятора поступает цифровой поток бит со скоростью R бит/с
и параметрами FT 1 Tb , |
где FT |
– |
тактовая |
частота |
следования |
бит, Tb – |
||||
b |
|
b |
|
|
|
|
|
|
|
|
длительность бита. |
Этот |
цифровой |
поток |
разделяется |
на k 4 потока |
|||||
d1,d2 ,d3,d4 символов |
|
|
|
|
|
|
|
|
|
|
k log2 M log2 16 4, |
FT FT |
4, |
Ts 4 Tb , , |
(4.15) |
||||||
|
|
|
|
|
s |
b |
|
|
|
|
где M 16 – |
позиционность |
модуляции, |
FT ,Ts |
– |
тактовая |
частота и |
||||
|
|
|
|
|
|
|
s |
|
|
|
длительность символа, соответственно.
110