

637_Nosov_V.I._Seti_radiodostupa_CH.2_
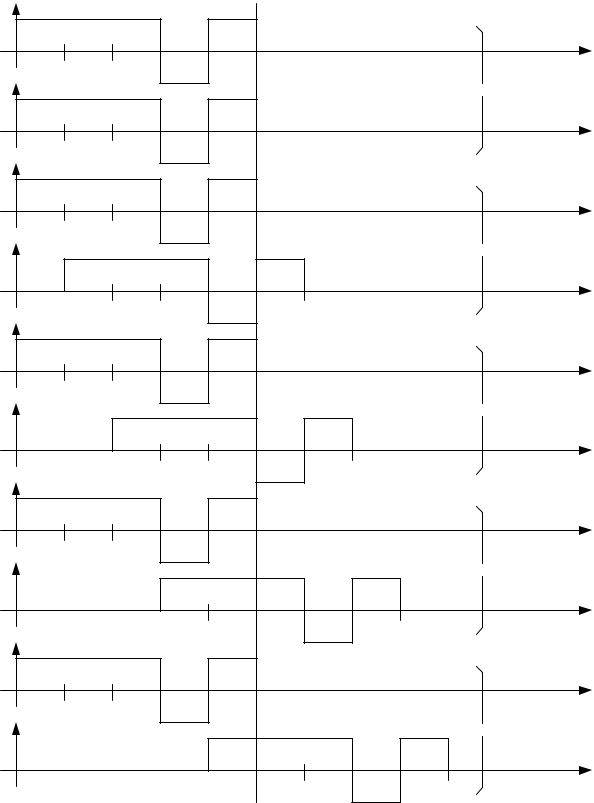
.pdfпоказан пример для приемника, генератор тактовых импульсов которого функционирует с опережением по отношению к входному сигналу. В данном случае начало интервала опережающего интегрирования попадает на предыдущий интервал передачи бита, тогда как запаздывающее интегрирование по-прежнему выполняется в пределах текущего символа. При запаздывающем интегрировании энергия накапливается за интервал времени (T-d), как и в случае, изображенном на рис. 2.17, а; но опережающее интегрирование накапливает энергию всего за время (T d) 2 , где – часть интервала
опережающего интегрирования, приходящаяся на предыдущий интервал передачи символа.
1 |
|
|
|
1 |
|
|
|
|
Информационный |
|
|
||
|
|
|
символ |
|
|
|
1 |
|
|
|
1 |
|
|
|
|
|
|
d |
|
|
|
|
|
|
|
|||
|
|
|
|
|
||||||||||
|
|
|
|
|
|
Промежуток |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
интегрирования |
|
|
|
|
|
||
|
|
|
|
|
|
переднего полустроба |
||||||||
|
|
|
|
|
|
|
Промежуток |
|
|
|
||||
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
интегрирования |
|
|
|||||
d |
|
|
|
|
задднего полустроба |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
a) |
|
|
|
|
|
|
|
|
|
б) |
|||
Рис. 2.17 Символьная синхронизация: а) точная синхронизация приемника; б) синхронизация с опережением
Следовательно, для этого случая сигнал рассогласования будет равен
2 , что приведет к снижению входного напряжения ГУН на рис. 2.16. Это,
всвою очередь, приведет к снижению выходной частоты ГУН что вызовет уменьшение выходной частоты генератора и приближение скорости таймера приемника к скорости входного сигнала.
Используя рис. 2.17 как образец, можно видеть, что если таймер приемника опаздывает, объемы энергии, накопленные при опережающем и запаздывающем интегрировании, будут обратны к полученным ранее и, соответственно, поменяется знак сигнала рассогласования. Таким образом, запаздывание таймера приемника приведет к увеличению напряжения ГУН, что вызовет увеличение выходной частоты генератора и приближение скорости таймера приемника к скорости входного сигнала.
Впримере, проиллюстрированном на рис. 2.17, неявно подразумевалось, что до и после рассматриваемого символа происходит
41
изменение информационного состояния. Если переходов нет, можно видеть, что опережающее и запаздывающее интегрирование приведет к одинаковым результатам. Следовательно, если не происходит изменения информационного состояния, сигнал рассогласования не генерируется, так как в этом случае отсутствует информация о тактовой частоте символов во входном сигнале. Это всегда следует иметь в виду при использовании любых символьных синхронизаторов. Для устранения эффекта отсутствия информации о тактовой частоте в принимаемом сигнале чаще всего осуществляется его скремблирование [23]
2.3.2 Кадровая синхронизация
Практически все потоки цифровых данных имеют некоторую кадровую структуру. Другими словами, поток данных разбит на равные группы бит. Если поток данных – это оцифрованный телевизионный сигнал, каждый пиксель в нем представляется словом из нескольких бит, которые группируются в горизонтальные растровые развертки, а затем в вертикальные растровые развертки. Компьютерные данные обычно разбиваются на слова, состоящие из некоторого числа 8-битовых байт, которые, в свою очередь, группируются в пакеты, кадры или файлы. Любая система, использующая кодирование с защитой от блочных ошибок, в качестве основы кадра должна брать длину кодового слова. Оцифрованная речь обычно передается пакетами или кадрами, неотличимыми от других цифровых данных.
Чтобы входной поток данных имел смысл для приемника, приемник должен синхронизироваться с кадровой структурой потока данных. Кадровая синхронизация обычно выполняется с помощью некоторой специальной процедуры передатчика. Данная процедура может быть как простой, так и довольно сложной, в зависимости от среды, в которой должна функционировать система.
Вероятно, простейшим методом, используемым для облегчения кадровой синхронизации, является введение маркера или кадрового синхросигнала. Маркер кадра – это отдельный бит или краткая последовательность бит, периодически вводимая передатчиком в поток данных. Приемник должен знать эту последовательность и период ее введения.
Приемник, достигший синхронизации данных, сопоставляет (проверяет корреляцию) эту известную последовательность с потоком поступающих данных в течение известного периода введения. Если приемник не синхронизирован с кадровой последовательностью, корреляция будет слабой. При синхронизации приемника с кадровой структурой, корреляция будет практически идеальной, повредить которую может только случайная ошибка детектирования.
Преимуществом маркера кадра является его простота. Для маркера может быть достаточно даже одного бита, если перед принятием решения, находится ли система в состоянии кадровой синхронизации, было выполнено достаточное число корреляций. Основной недостаток состоит в том, что данное достаточное число может быть очень большим; следовательно, большим может быть и время,
42
требуемое для достижения синхронизации. Таким образом, наибольшую пользу маркеры кадров представляют в системах, непрерывно передающих данные, подобно многим телефонным и компьютерным каналам связи, и не подходят для систем, передающих отдельные пакеты, или систем, требующих быстрого получения кадровой синхронизации. Еще одним недостатком маркера кадра является то, что введенный бит (биты) может повысить громоздкость структуры потока данных.
В качестве примера можно привести цифровой поток Е1 первого иерархического уровня Европейской плезиохронной цифровой иерархии ПЦИ со скоростью 2 Мбит/с. Этот цифровой поток широко используется в телефонных сетях в Европе. Структура кадра Е1 длительностью 125 мкс, включает в себя 32 байта, первый из которых является маркером кадра (кадровым синхросигналом) размером 8 бит, вводимого после каждого набора из 32 байт (каждый из информационных байт представляет один из 30 возможных потоков речевой информации)[15, 23]. При таком подходе возникает информационная кадровая структура, кратная 256 бит.
В системах с неустойчивыми или пульсирующими передачами либо в системах с необходимостью быстрого получения синхронизации рекомендуется использовать синхронизирующие кодовые слова. Обычно такие кодовые слова передаются как часть заголовка сообщения. Приемник должен знать кодовое слово и постоянно искать его в потоке данных, возможно, используя для этого коррелятор на согласованных фильтрах. Детектирование кодового слова укажет известную позицию (обычно – начало) информационного кадра. Преимуществом подобной системы является то, что кадровая синхронизация может достигаться практически мгновенно. Единственная задержка – отслеживание кодового слова. Недостаток – кодовое слово, выбираемое для сохранения низкой вероятности ложного детектирования, может быть длинным, по сравнению с маркером кадра. Здесь стоит отметить, что сложность определения корреляции пропорциональна длине последовательности, поэтому при использовании кодового слова коррелятор может быть относительно сложным.
Хорошим синхронизирующим кодовым словом является то, которое имеет малое абсолютное значение "побочных максимумов корреляции". Побочный максимум корреляции – это значение корреляции кодового слова с собственной смещенной версией. Следовательно, данное значение побочного максимума корреляции для сдвига на k символов N-битовой кодовой последовательностиXi описывается следующим выражением:
N k |
|
|
Ck X j |
X j k . |
(2.37) |
j 1 |
|
|
Здесь Xi 1 i N – отдельный |
кодовый символ, |
принимающий |
значения ±1, а соседние информационные символы (соотнесенные со значениями индекса i > N) предполагаются равными нулю. Пример вычисления
43
по (2.37) побочного максимума корреляционной функции приведен на рис. 2.18. 5-битовая (N = 5)последовательность в данном примере имеет неплохие корреляционные свойства: наибольший побочный максимум в пять раз меньше основного, С0. Последовательности, в которых, как на рис. 2.16, максимальный побочный максимум равен 1, называются последовательностями или словами Баркера (Barker word) [19]. Не существует известного конструктивного метода поиска слов Баркера, и в настоящее время известно всего 10 уникальных слов, наибольшее из которых состоит из 13 символов. Известные слова Баркера перечислены в таблице 2.1.
Таблица 2.1 Синхронизирующие кодовые слова Баркера
Длина последовательности, N |
Структура последовательности |
1 |
+ |
2 |
или |
3 |
|
4 |
или |
5 |
|
7 |
|
11 |
|
13 |
? |
Свойства кодовых слов Баркера основываются на предположении о нулевом значении соседних символов рис. 2.16. Это приближение к равновероятным случайным двоичным данным, когда символы, соседствующие со словом Баркера, принимают значения ±1.
К сожалению, последовательности Баркера слишком коротки, чтобы это приближение во всех случаях давало лучшее кодовое слово при передаче случайной двоичной информации. Используя компьютерное моделирование, Уиллард (Willard) [19] нашел последовательности для случайных соседних символов, имеющие такую же длину, как и слова Баркера, но лучшие с точки зрения минимальной вероятности ложной синхронизации. Последовательности Уилларда приведены в табл. 2.2.
Таблица 2.2 Синхронизирующие кодовые слова Уилларда
Длина последовательности, N |
Структура последовательности |
1 |
+ |
2 |
|
3 |
|
4 |
|
5 |
|
7 |
|
11 |
|
13 |
|
|
44 |
t
 C0 5
C0 5
t
t
 C1 0
C1 0
t
t
 C2 1
C2 1
t
t
 C3 0
C3 0
t
t
 C4 1
C4 1
t
Рис. 2.18 Вычисление побочного максимума корреляционной функции
Система, использующая синхронизирующее слово, описывается двумя вероятностями – вероятностью пропущенного детектирования и вероятностью
45
ложной тревоги. Очевидно, что желательно максимально уменьшить обе вероятности. К сожалению, это требование противоречиво. Для того чтобы уменьшить вероятность пропуска, система должна допускать неидеальную корреляцию входного синхронизирующего слова, т.е. слово должно приниматься даже в том случае, если оно содержит небольшое число ошибок. В то же время это увеличивает число последовательностей символов, которые будут приняты; следовательно, увеличивается вероятность ложной тревоги. Вероятность пропуска для N -битового слова, если допустимым является k или меньше ошибок, описывается следующим выражением:
N |
Nj |
p j (1 p)N j . |
|
pm |
(2.38) |
||
j k 1 |
|
|
|
Здесь р – вероятность символьной ошибки, допущенной детектором. Вероятность ложной тревоги, вызванная N битами случайной последовательности данных, описывается следующим выражением:
N
pFA k 2jN . (2.39)
j 0
Видно, что при малых р pm растет с увеличением k, приблизительно как степенная функция. К сожалению, с увеличением k pFA уменьшается,
приблизительно как степенная функция. Для одновременного получения приемлемых значений pm и pFA при данном значении р часто требуются
значения N , большие тех, которые дают последовательности Баркера и Уилларда.
46
Контрольные вопросы
1.Поясните, что означает девиация частоты при частотной модуляции.
2.Поясните, что означает индекс модуляции при частотной модуляции.
3.Изобразите временную диаграмму сигнала с двухпозиционной частотной модуляцией.
4.Поясните отличия демодуляторов ЧМ сигналов по огибающей и по мгновенной частоте.
5.Поясните чему равно минимальное расстояние между тонами для ортогональной передачи ЧМ – модулированных сигналов с некогерентным детектированием.
6.Поясните чему равно минимальное расстояние между тонами для ортогональной передачи ЧМ – модулированных сигналов с когерентным детектированием.
7.Поясните получение модулированного сигнала при модуляции минимальным сдвигом.
8.Поясните способы осуществления тактовой (символьной) синхронизации.
9.Поясните способы осуществления цикловой (кадровой) синхронизации.
47

3 ФАЗОВАЯ МОДУЛЯЦИЯ
При модуляции высокочастотного гармонического колебания цифровым сигналом по фазе (PSK – phase shift keying), выражение для него может быть записано следующим образом [13, 19]
s (t) |
|
2E |
|
cos( t (t)), |
0 t T, |
i 1,2,..., M |
(3.1) |
||
|
|||||||||
i |
T |
0 |
i |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
В выражении (3.1) фазовый угол i (t) |
может принимать М дискретных |
||||||||
значений, определяемых следующим образом |
|
|
|
||||||
|
|
|
|
(t) |
2 i |
, i 1,2,..., M. |
|
(3.2) |
|
|
|
|
|
|
|
||||
|
|
|
|
i |
M |
|
|
|
|
|
|
|
|
|
|
|
|
||
3.1 Двухпозиционная фазовая модуляция
При двухпозиционной фазовой модуляции 2-ОФМ (BPSK – binary phase shift keying) кратность модуляции М = 2 и из (3.1) и (3.2) следует, что i принимает всего два значения и выходной сигнал модулятора содержит всего два значения
s (t) |
|
2E |
|
|
|
cos t |
(t) , |
0 t T , |
i 1,2. |
|||||||
|
||||||||||||||||
i |
T |
0 |
i |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
s (t) |
2E |
|
|
cos( t), |
0 t T , |
|
(3.3) |
|||||||||
|
|
|||||||||||||||
1 |
|
|
T |
0 |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
s (t) |
2E |
|
cos( t ) |
|
|
2E |
|
cos( t), |
0 t T. |
|||||||
|
|
|||||||||||||||
2 |
|
|
T |
0 |
|
|
|
|
T |
0 |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
На рис. 3.1 приведена структурная схема модулятора 2-ОФМ. Входной цифровой сигнал рис. 3.2 а с длительностью элемента Т = Тb поступает на дифференциальный кодер (кодер относительности), за счет применения которого в кодере кодируется не сама фаза высокочастотного сигнала, вырабатываемая генератором, а разность фаз двух соседних сигналов на выходе модулятора. Это позволяет избежать влияния неоднозначности восстановления фазы опорного сигнала в демодуляторе приемника на качество его работы. Наличие относительного кодирования при использовании фазовой модуляции нашло отражение в ее названии – относительная фазовая модуляция ОФМ.
48

|
|
|
|
|
|
|
|
|
АМ1 |
|
|
|
s1 (t) |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Цифр. |
|
|
|
|
|
|
|
|
|
cos0t |
|
|
|
Сигнал |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
сигнал |
Дифф. |
|
|
ФНЧ |
|
|
|
|
Ген. |
|
Σ |
|
|
|
ПФ |
|
2-ОФМ |
||
|
кодер |
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
cos0t s2 (t)
АМ2
Рис. 3.1 Структурная схема модулятора 2-ОФМ
После кодера относительности цифровой сигнал поступает на фильтр нижних частот, который ограничивает полосу модулирующего сигнала, т.е. формирует коэффициент и имеет АЧХ, представленную выражением (1.3).
С выхода ФНЧ модулирующий сигнал подается на амплитудные модуляторы АМ1 и АМ2, на выходе которых образуются сигналы s1(t) и s2 (t) ,
а после сумматора получается сигнал 2-ОФМ. На рис.3.2 представлены временная а и векторная б диаграммы для двухпозиционной фазовой модуляции.
Из рис. 3.2 следует, что в моменты смены входного бита (от «0» к «1» и наоборот) наблюдается резкий скачок фазы, что приводит к резкому изменению частоты (t) d (t) dt , и, следовательно, к возрастанию мощности
dt , и, следовательно, к возрастанию мощности
внеполосных составляющих спектра сигнала с BPSK. Полосовой фильтр ПФ рис. 3.1 не пропускает резкие изменения частоты фазомодулированного сигнала, что приводит к уменьшению амплитуды сигнала при наличии скачков фазы на 180 , т.е. на выходе полосового фильтра фазомодулированный сигнал уже не будет с постоянной амплитудой рис. 3.2, а.
При модуляции BPSK векторное представление модулированного сигнала дает два противофазных вектора рис. 3.2, б.
Сигнал на выходе двухпозиционного фазового модулятора рис. 3.1, 3.2 представляет собой сумму двух амплитудно-модулированных сигналов. Поскольку фазовое уплотнение этих двух сигналов не приводит к расширению полосы, занимаемой каждым из двух амплитудно-модулированных сигналов, спектральная плотность мощности сигнала BPSK представляет собой несущую частоту и две боковые (нижняя и верхняя) полосы, образованные модулирующим сигналом рис. 3.3.
Учитывая то, что в векторном представлении сигнал BPSK имеет вид
двух противофазных векторов рис. 3.2 |
и что в скремблированном цифровом |
сигнале вероятности появления «0» |
и «1» примерно равны p1 p0 0,5, |
спектральная плотность мощности на |
центральной частоте модулятора f0 |
будет равна нулю, т.е. несущая частота на выходе модулятора будет отсутствовать.
49

Данные |
|
1 |
0 |
1 |
0 |
|
|
u(t) |
|
|
|
|
1 |
|
|
|
|
Цифровой |
0 |
|
|
|
t |
сигнал |
|
|
|
|
|
|
Tb |
|
|
|
|
|
|
|
|
|
|
s1 (t) |
|
|
|
|
|
|
|
|
|
|
t |
s2 (t) 
t
|
|
u(t) |
s1 |
(t) |
s2 (t) |
s1 (t) |
2E /T |
|
|||||
|
|
|
|
|
||
ФМ сигнал |
0 |
|
|
|
|
t |
|
|
|
|
|
||
|
|
u(t) |
0 |
180 |
0 |
|
2E /T |
|
|||||
|
|
|
|
|
||
ФМ сигнал |
0 |
|
|
|
|
t |
после ПФ |
|
|
|
|
|
|
|
|
|
|
|
|
а) |
s2 |
s1 |
б)
Рис. 3.2 Двухпозиционная (М = 2) фазовая модуляция, временная а и векторная б диаграммы
Таким образом, полоса, занимаемая фазово-модулированным сигналом, в два раза больше полосы, занимаемой цифровым модулирующим сигналом. Учитывая полосу, занимаемую цифровым модулирующим сигналом (1.8), можно записать полосу частот, занимаемую фазово-модулированным сигналом
П2 ОФМ 2 ПЦС FT (1 ). |
(3.4) |
50