

637_Nosov_V.I._Seti_radiodostupa_CH.2_
.pdfПродолжение таблицы 4.9
Номер |
|
Состояния потоков |
|
|
Состояния потоков |
|
Значения |
|||||||||||
сигнальной |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
уровней |
|
точки |
d6 |
|
d5 |
d4 |
d3 |
d2 |
|
d1 |
i1 |
|
i2 |
i3 |
q1 |
q2 |
|
q3 |
I |
Q |
20 |
1 |
|
1 |
0 |
0 |
1 |
|
0 |
0 |
|
1 |
0 |
0 |
1 |
|
1 |
+3 |
+1 |
21 |
1 |
|
0 |
1 |
0 |
1 |
|
1 |
0 |
|
1 |
0 |
1 |
0 |
|
0 |
+3 |
-1 |
22 |
1 |
|
0 |
1 |
0 |
1 |
|
0 |
0 |
|
1 |
0 |
1 |
0 |
|
1 |
+3 |
-3 |
23 |
1 |
|
0 |
0 |
1 |
1 |
|
1 |
0 |
|
1 |
0 |
1 |
1 |
|
0 |
+3 |
-5 |
24 |
1 |
|
0 |
0 |
0 |
1 |
|
0 |
0 |
|
1 |
0 |
1 |
1 |
|
1 |
+3 |
-7 |
25 |
1 |
|
1 |
0 |
0 |
0 |
|
0 |
0 |
|
1 |
1 |
0 |
0 |
|
0 |
+1 |
+7 |
26 |
1 |
|
1 |
1 |
0 |
0 |
|
1 |
0 |
|
1 |
1 |
0 |
0 |
|
1 |
+1 |
+5 |
27 |
1 |
|
1 |
0 |
1 |
0 |
|
0 |
0 |
|
1 |
1 |
0 |
1 |
|
0 |
+1 |
+3 |
28 |
1 |
|
1 |
0 |
1 |
0 |
|
1 |
0 |
|
1 |
1 |
0 |
1 |
|
1 |
+1 |
+1 |
29 |
1 |
|
0 |
0 |
0 |
0 |
|
0 |
0 |
|
1 |
1 |
1 |
0 |
|
0 |
+1 |
-1 |
30 |
1 |
|
0 |
1 |
0 |
0 |
|
1 |
0 |
|
1 |
1 |
1 |
0 |
|
1 |
+1 |
-3 |
31 |
1 |
|
0 |
0 |
1 |
0 |
|
0 |
0 |
|
1 |
1 |
1 |
1 |
|
0 |
+1 |
-5 |
32 |
1 |
|
0 |
0 |
1 |
0 |
|
1 |
0 |
|
1 |
1 |
1 |
1 |
|
1 |
+1 |
-7 |
33 |
0 |
|
0 |
1 |
1 |
1 |
|
1 |
1 |
|
0 |
0 |
0 |
0 |
|
0 |
-1 |
+7 |
34 |
0 |
|
0 |
1 |
1 |
1 |
|
0 |
1 |
|
0 |
0 |
0 |
0 |
|
1 |
-1 |
+5 |
35 |
0 |
|
0 |
0 |
0 |
1 |
|
1 |
1 |
|
0 |
0 |
0 |
1 |
|
0 |
-1 |
+3 |
36 |
0 |
|
0 |
0 |
1 |
1 |
|
0 |
1 |
|
0 |
0 |
0 |
1 |
|
1 |
-1 |
+1 |
37 |
0 |
|
1 |
1 |
1 |
1 |
|
1 |
1 |
|
0 |
0 |
1 |
0 |
|
0 |
-1 |
-1 |
38 |
0 |
|
1 |
1 |
1 |
1 |
|
0 |
1 |
|
0 |
0 |
1 |
0 |
|
1 |
-1 |
-3 |
39 |
0 |
|
1 |
0 |
0 |
1 |
|
1 |
1 |
|
0 |
0 |
1 |
1 |
|
0 |
-1 |
-5 |
40 |
0 |
|
1 |
0 |
1 |
1 |
|
0 |
1 |
|
0 |
0 |
1 |
1 |
|
1 |
-1 |
-7 |
41 |
0 |
|
0 |
1 |
1 |
0 |
|
0 |
1 |
|
0 |
1 |
0 |
0 |
|
0 |
-3 |
+7 |
42 |
0 |
|
0 |
1 |
1 |
0 |
|
1 |
1 |
|
0 |
1 |
0 |
0 |
|
1 |
-3 |
+5 |
43 |
0 |
|
0 |
1 |
0 |
0 |
|
0 |
1 |
|
0 |
1 |
0 |
1 |
|
0 |
-3 |
+3 |
44 |
0 |
|
0 |
0 |
0 |
0 |
|
1 |
1 |
|
0 |
1 |
0 |
1 |
|
1 |
-3 |
+1 |
45 |
0 |
|
1 |
1 |
1 |
0 |
|
0 |
1 |
|
0 |
1 |
1 |
0 |
|
0 |
-3 |
-1 |
46 |
0 |
|
1 |
1 |
1 |
0 |
|
1 |
1 |
|
0 |
1 |
1 |
0 |
|
1 |
-3 |
-3 |
47 |
0 |
|
1 |
1 |
0 |
0 |
|
0 |
1 |
|
0 |
1 |
1 |
1 |
|
0 |
-3 |
-5 |
48 |
0 |
|
1 |
0 |
0 |
0 |
|
1 |
1 |
|
0 |
1 |
1 |
1 |
|
1 |
-3 |
-7 |
49 |
0 |
|
0 |
1 |
0 |
1 |
|
1 |
1 |
|
1 |
0 |
0 |
0 |
|
0 |
-5 |
+7 |
50 |
0 |
|
0 |
1 |
0 |
1 |
|
0 |
1 |
|
1 |
0 |
0 |
0 |
|
1 |
-5 |
+5 |
51 |
0 |
|
0 |
0 |
1 |
1 |
|
1 |
1 |
|
1 |
0 |
0 |
1 |
|
0 |
-5 |
+3 |
52 |
0 |
|
0 |
0 |
0 |
1 |
|
0 |
1 |
|
1 |
0 |
0 |
1 |
|
1 |
-5 |
+1 |
53 |
0 |
|
1 |
1 |
0 |
1 |
|
1 |
1 |
|
1 |
0 |
1 |
0 |
|
0 |
-5 |
-1 |
54 |
0 |
|
1 |
1 |
0 |
1 |
|
0 |
1 |
|
1 |
0 |
1 |
0 |
|
1 |
-5 |
-3 |
55 |
0 |
|
1 |
0 |
1 |
1 |
|
1 |
1 |
|
1 |
0 |
1 |
1 |
|
0 |
-5 |
-5 |
56 |
0 |
|
1 |
0 |
0 |
1 |
|
0 |
1 |
|
1 |
0 |
1 |
1 |
|
1 |
-5 |
-7 |
57 |
0 |
|
0 |
0 |
0 |
0 |
|
0 |
1 |
|
1 |
1 |
0 |
0 |
|
0 |
-7 |
+7 |
58 |
0 |
|
0 |
1 |
0 |
0 |
|
1 |
1 |
|
1 |
1 |
0 |
0 |
|
1 |
-7 |
+5 |
|
|
|
|
|
|
|
|
141 |
|
|
|
|
|
|
|
|
|
|
Продолжение таблицы 4.9
Номер |
|
Состояния потоков |
|
|
Состояния потоков |
|
Значения |
|||||||||||
сигнальной |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
уровней |
|
точки |
d6 |
|
d5 |
d4 |
d3 |
d2 |
|
d1 |
i1 |
|
i2 |
i3 |
q1 |
q2 |
|
q3 |
I |
Q |
59 |
0 |
|
0 |
0 |
1 |
0 |
|
0 |
1 |
|
1 |
1 |
0 |
1 |
|
0 |
-7 |
+3 |
60 |
0 |
|
0 |
0 |
1 |
0 |
|
1 |
1 |
|
1 |
1 |
0 |
1 |
|
1 |
-7 |
+1 |
61 |
0 |
|
1 |
0 |
0 |
0 |
|
0 |
1 |
|
1 |
1 |
1 |
0 |
|
0 |
-7 |
-1 |
62 |
0 |
|
1 |
1 |
0 |
0 |
|
1 |
1 |
|
1 |
1 |
1 |
0 |
|
1 |
-7 |
-3 |
63 |
0 |
|
1 |
0 |
1 |
0 |
|
0 |
1 |
|
1 |
1 |
1 |
1 |
|
0 |
-7 |
-5 |
64 |
0 |
|
1 |
0 |
1 |
0 |
|
1 |
1 |
|
1 |
1 |
1 |
1 |
|
1 |
-7 |
-7 |
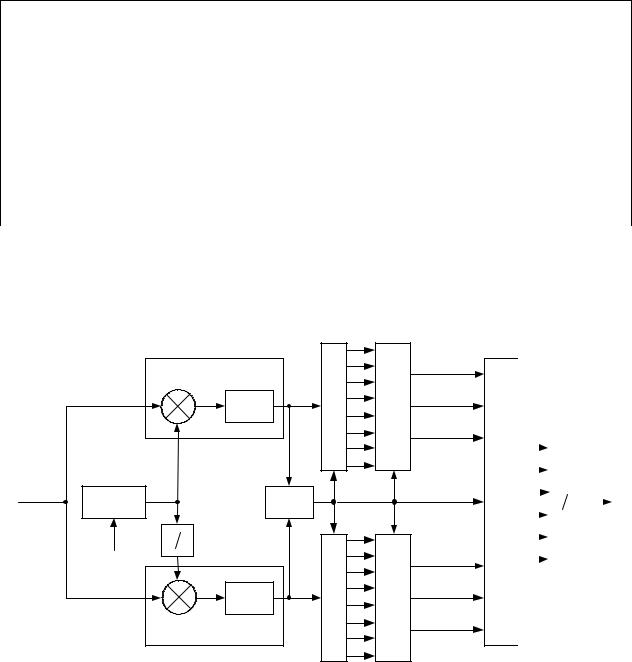
Структурная схема демодулятора 64-КАМ приведена на рис. 4.30.
|
|
|
|
|
1 |
|
|
|
|
ФД синфазный |
|
|
2 |
|
i1 |
|
|
|
|
3 |
|
|
|
|
|
ФНЧ |
Is |
(t) |
4 |
АЦП |
i2 |
|
|
|
РУ 5 |
|
|||
|
|
|
|
|
6 |
|
i3 |
|
|
cos0t |
|
|
7 |
|
|
|
|
|
|
8 |
|
|
|
|
|
|
|
|
|
|
|
64-КАМ |
U |
оп |
|
|
FT |
|
|
Ген. |
|
ВТЧ |
|
s |
|
|
|
|
|
|
|
|
|
||
|
|
2 |
|
|
1 |
|
|
|
|
|
|
2 |
|
|
|
ФАПЧ |
|
|
|
|
|
q1 |
|
|
sin 0t |
|
|
3 |
|
||
|
|
|
|
|
|
||
|
|
|
|
4 |
|
q2 |
|
|
|
|
|
|
|
||
|
|
ФНЧ |
|
РУ |
5 |
АЦП |
|
|
|
|
Qs |
(t) |
6 |
|
q3 |
|
ФД квадратурный |
|
|
|
|||
|
|
|
7 |
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
8 |
|
|
|
|
Рис. 4.30 Когерентный демодулятор 64-КАМ |
|||||
Деразмещение
FT |
|
|
|
||||
|
S |
|
|
|
|||
d1 |
|
|
|
|
|||
|
|
|
|||||
d2 |
|
|
|
|
|||
d3 |
|
FT |
|||||
|
|
|
|
|
|
b |
|
d4 |
P S |
|
|
||||
Tb |
|||||||
d |
5 |
|
|
|
|||
|
|
|
|
|
|
||
d6 |
|
|
|
|
|||
TS |
|
|
|
||||
|
|
|
|||||
|
|
|
|
|
|
|
|
С выхода приемника сигнал с 64-КАМ поступает на один из входов фазовых детекторов синфазного и квадратурного каналов. На вторые входы этих фазовых детекторов поступают опорные сигналы cos 0t для синфазного
канала и sin 0t для квадратурного канала. Опорный сигнал (восстановленную
несущую) вырабатывает генератор, который с помощью системы синхронизации (петли ФАПЧ) фазируется под фазу входного сигнала 64-КАМ.
После фильтрации в фильтрах нижних частот ФНЧ побочных продуктов перемножения входных и опорных сигналов, на выходах фазовых детекторов синфазного и квадратурного каналов получаются сигналы основной полосы (base band), в данном случае восьмиуровневые сигналы Is (t) и Qs (t) .
142
Переходы между уровнями в восьмиуровневых сигналах несут информацию о тактовой частоте символов, поэтому они используются в выделителе тактовой частоты символов FTs . Тактовая частота символов
подается на решающие устройства, аналогово-цифровые преобразователи и устройство деразмещения.
В решающих устройствах принимается решение о принятом на интервале текущего символа уровне и это решение в виде одного из восьми принятых уровней подается на аналогово-цифровые преобразователи. В АЦП каждому из принятых уровней в соответствии с алгоритмом работы АЦП ставятся в
соответствие по три цифровых потока в синфазном i1i2i2 |
и квадратурном q1q2q3 |
каналах. |
|
В устройстве деразмещения каждой из комбинаций трех цифровых |
|
потоков в синфазном i1i2i2 и квадратурном q1q2q3 |
каналах ставится в |
соответствии с алгоритмом деразмещения одна из 2k 26 комбинаций шести цифровых потоков символов d1d2d3d4d5d6 . В параллельно-последовательном
преобразователе шесть цифровых потоков символов d1d2d3d4d5d6 преобразуются в цифровой поток с битовой скоростью Rb k Rs .
Восстановление несущей частоты (опорного сигнала) при 64-КАМ производится также как и при М-ОФМ (см. раздел 3.2.5.2.1).
Процесс восстановления опорного колебания должен быть настолько точным, чтобы фазовая ошибка имела малую величину, как постоянной составляющей, так и флюктуации (фазового дрожания).
4.5 Основные параметры сигналов М-КАМ
По аналогии с подходами, изложенными в подразделах 4.1, 4.2 и 4.3 можно получить все характеристики многопозиционных сигналов для М > 32, основные из которых приведены в таблице 4.10. Все параметры многопозиционных сигналов, приведенные в таблице 4.10, рассчитаны по формулам (4.1) (4.14).
Спектральную эффективность многопозиционных методов модуляции можно определить из уравнения (4.42)
|
R |
бит / с |
, |
(4.42) |
||
|
|
|
|
|||
|
|
|||||
|
П |
Гц |
|
|
|
|
где R – скорость передачи |
информации на входе модулятора, |
П – |
||||
полоса частот, занимаемая модулированным М – позиционным сигналом. Скорость передачи информации на входе модулятора численно равна
тактовой частоте следования бит
143
R |
|
бит |
F |
|
1 |
. |
(4.43) |
|
|
|
|
|
|||||
|
|
Tb |
|
Tb |
|
|||
|
|
с |
|
|
|
|||
Таблица 4.10 Основные параметры сигналов М-КАМ
Позици |
Тип |
Количе |
Количе |
Количес |
Макс. |
Количес |
Количес |
онност |
созвез |
ство |
ство |
тво |
значени |
тво |
тво |
ь |
дия |
потоко |
потоко |
уровней |
я |
лишних |
лишних |
модуля |
|
в |
в |
NI NQ |
уровней |
точек |
точек в |
ции, М |
|
символ |
символ |
|
на |
|
квадран |
|
|
ов, k |
ов, |
|
выходе |
|
те |
|
|
|
ni nq |
|
ЦАП |
|
|
|
|
|
|
|
|
|
|
16 |
квадр |
4 |
2 |
4 |
3 |
|
|
|
ат |
|
|
|
|
|
|
32 |
крест |
5 |
3 |
6 |
5 |
4 |
1 |
64 |
квадр |
6 |
3 |
8 |
7 |
|
|
|
ат |
|
|
|
|
|
|
128 |
крест |
7 |
4 |
12 |
11 |
16 |
4 |
256 |
квадр |
8 |
4 |
16 |
15 |
|
|
|
ат |
|
|
|
|
|
|
512 |
крест |
9 |
5 |
24 |
23 |
64 |
16 |
1024 |
квадр |
10 |
5 |
32 |
31 |
|
|
|
ат |
|
|
|
|
|
|
2048 |
крест |
11 |
6 |
48 |
47 |
256 |
64 |
4096 |
квадр |
12 |
6 |
64 |
63 |
|
|
|
ат |
|
|
|
|
|
|
Полоса частот, занимаемая модулированным М – позиционным сигналом определяется из выражения (4.14)
ПM |
|
FT |
(1 ) |
(4.44) |
|
b |
|
, |
|||
log2 M
где – коэффициент «скругления» (roll off factor), который определяется фильтром нижних частот на входе модулятора.
С учетом (4.42) – (4.44) спектральную эффективность М – позиционной модуляции можно определить из уравнения
|
R |
|
FT |
FT log |
2 M |
|
log |
2 |
M |
|
|
||
|
|
|
b |
|
b |
|
|
|
|
|
. |
(4.45) |
|
|
|
|
|
|
) |
||||||||
|
П П F (1 ) |
|
(1 |
|
|
||||||||
|
|
|
|
|
T |
|
|
|
|
|
|
|
|
|
|
|
|
|
b |
|
|
|
|
|
|
|
|
144
Значения спектральной эффективности М – позиционных методов модуляции, рассчитанные по (4.45), приведены в таблице 4.11.
Таблица 4.11 Спектральная эффективность многопозиционной модуляции
Позиционность |
|
Спектральная эффективность, |
||
модуляции, М |
|
|
|
|
0 |
0,2 |
0,35 |
0,45 |
|
|
|
|
|
|
2 |
1 |
0,833 |
0,741 |
0,69 |
4 |
2 |
1,667 |
1,482 |
1,38 |
8 |
3 |
2,499 |
2,223 |
2,07 |
16 |
4 |
3,332 |
2,964 |
2,76 |
32 |
5 |
4,165 |
3,705 |
3,45 |
64 |
6 |
4,998 |
4,446 |
4,14 |
128 |
7 |
5,831 |
5,187 |
4,83 |
256 |
8 |
6,664 |
5,928 |
5,52 |
512 |
9 |
7,497 |
6,669 |
6,21 |
1024 |
10 |
8,33 |
7,41 |
6,9 |
2048 |
11 |
9,163 |
8,151 |
7,59 |
4096 |
12 |
9,996 |
8,892 |
8,28 |
145
Контрольные вопросы
1.Поясните работу модулятора М-КАМ.
2.Поясните работу когерентного демодулятора М-КАМ.
3.Поясните работу модулятора 16-КАМ.
4.Созвездие сигнала 16-КАМ.
5.Что получается в результате прореживания созвездия сигнала 16КАМ.
6.Поясните работу когерентного демодулятора 16-КАМ.
7.В чем основные отличия модулятора 32-КАМ от модулятора 16КАМ.
8.Созвездие сигнала 32-КАМ.
9.Правило построения кодовой таблицы размещения при 32-КАМ.
10.В чем основные отличия когерентных демодуляторов 32-КАМ и
16-КАМ.
11.В чем основные отличия модуляторов и демодуляторов 16-КАМ и
64-КАМ.
12.Приведите основные параметры сигналов М-КАМ.
146
5 ОПРЕДЕЛЕНИЕ ВЕРОЯТНОСТИ ОШИБОЧНОГО ПРИЕМА
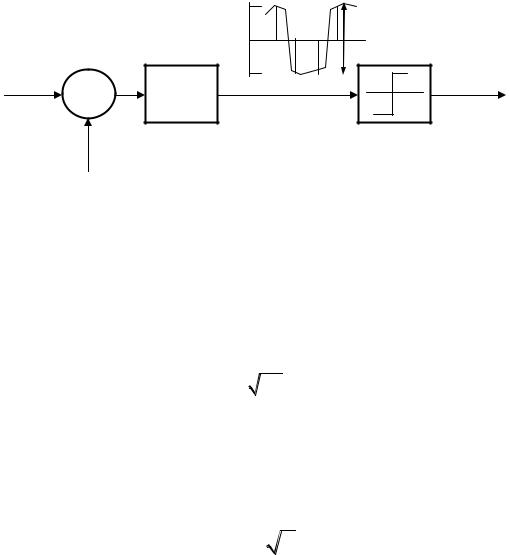
Рассмотрим модель приемника цифровой системы передачи, показанную на рисунке 5.1 [17]. Приемник состоит из двух частей: цепи обработки сигнала и обнаружителя цифрового сигнала (решающего устройства). Решающее устройство оценивает на своем входе полярность сигнала в моменты принятия решения, определяемые тактовой частотой. Ошибки при решении возникают в том случае, когда в моменты принятия решения шум будет иметь амплитуду равную или более V и полярность противоположную полярности переданного импульса. Расстояние d между максимальным значениями амплитуд импульсов V и V называется расстоянием ошибки.
|
|
V |
d |
|
|
|
|
|
|
|
|
Vпор |
|
|
|
|
-V |
1 |
1001 |
Сигнал |
|
|
||
H(f) |
|
|
||
|
0 |
|
||
|
|
|
|
|
|
Шум |
|
|
|
Рисунок 5.1 Модель приемника цифровых сигналов
Если шум имеет Гауссовское (нормальное) распределение вероятностей, то вероятность ошибки можно записать.
|
|
1 |
|
|
|
|
|
|
|
|
|
|
2 |
2 |
|
|
|
pош |
|
|
|
е t |
/ 2 |
dt |
(5.1), |
|
|
|
|
|
|||||
|
|
|||||||
|
|
2 V |
|
|
|
|
||
где 2 - мощность шума на входе решающего устройства. Используя функцию ошибок
|
2 |
|
z |
|
|
erf (z) |
|
e t2 dt |
(5.2), |
||
|
|
|
|||
|
|
||||
|
|
|
o |
|
|
можно представить формулу (5.1) в виде
pош (1 erf (z)) / 2 |
(5.3), |
147 |
|
|
|
|
|
|
|
где z V / |
2 . |
|
|
|
|
Довольно часто вероятность ошибки выражается через функцию, |
|
||||
дополняющую функцию ошибок |
|
|
|
||
|
|
pош erfc(z) / 2 |
(5.4), |
||
|
|
|
|
||
где erfc(z) 1 erf (z); z v / |
2 . |
|
|||
При многопозиционной модуляции в решающем устройстве рисунок 5.1 обрабатывается многоуровневый сигнал, и вероятность ошибки легко определяется из (5.4) путем соответствующего уменьшения расстояния ошибок d. Так, если максимальная амплитуда сигнала равна V, то расстояние ошибок между равномерно расставленными уровнями на входе решающего устройства
d |
V |
, |
(5.5) |
|
|
|
|||
N 1 |
||||
где N - число уровней сигнала в синфазном NI |
и квадратурном NQ каналах |
|||
при многопозиционной модуляции. Тогда в соответствии с (5.4) вероятность ошибки в многоуровневой системе
p |
1 |
|
N 1 |
|
V |
|
|
|
|
|
|
erfc |
|
|
|
|
|
||||
log2 N |
N |
N 1 |
|
|
, |
(5.6) |
||||
ош |
|
|
2 |
|||||||
|
|
|
|
|
|
|
|
|
|
|
где: – (N 1) N – отражает тот факт, что внутренние уровни в сигнале
N – отражает тот факт, что внутренние уровни в сигнале
подвержены воздействию шума с положительной и отрицательной амплитудами;
– коэффициент 1 log2 N – является результатом предположения, что в
многоуровневой системе сигнал кодируется таким образом, чтобы ошибки в символах приводили к одиночным ошибкам в двоичном сигнале ( log2 N равен
числу битов на символ).
Из выражения (5.6) следует, что с учетом отношения пикового значения сигнала к шуму на входе решающего устройства при N – уровневой передаче вносится ухудшение (смещение) характеристики ошибок, равное 20log2 (N 1)
дБ.
Выражение (5.6) связывает вероятность ошибки с пиковой мощностью сигнала V 2 . Для определения вероятности ошибки по отношению к средней мощности сигнала в N – уровневой системе эта мощность определяется путем усреднения мощностей, соответствующих амплитудам различных импульсов
148

2 |
2 |
V |
2 |
|
3V |
2 |
2 |
2V |
2 |
|
L / 2 |
2 |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Vср |
|
|
|
|
|
|
|
|
... V |
|
|
|
|
2i 1 |
|
(5.7) |
|
|
|
|
N N 1 |
2 |
|
||||||||||
|
N |
N 1 |
|
|
N 1 |
|
|
|
i 1 |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
При выводе (5.7) предполагалось, что появление различных амплитуд
|
|
V / N 1 1, 3,..., N 1 |
||
|
|
|
|
|
равновероятно. |
|
|
|
|
Из (5.6) |
следует также, что если в многоуровневой системе увеличить V в |
|||
N 1 раз, то вероятность ошибки в N |
уровневой системе станет равной |
|||
вероятности |
ошибки |
в двухуровневой |
системе (без учета коэффициентов |
|
1 log2 N и |
(N 1) N , |
которые |
обычно |
соответствуют нескольким десятым |
долям децибела).
Предыдущие выражения (5.1 – 5.6) для вероятности ошибки связывают эту вероятность с энергией сигнала в моменты принятия решения и мощностью шума на входе решающего устройства. При сопоставлении различных способов модуляции цифровыми сигналами, в частности для многоуровневых систем, более удобно связать характеристику вероятности ошибки с мощностью сигнала и мощностью шума на входе приемника.
Дисперсия шума 2 , использованная в предыдущих формулах, точно равна значению мощности, которая была бы измерена на входе решающего устройства при отсутствии сигнала [17]
|
|
||||
2 N |
|
H f |
|
2 df No Пш |
(5.8) |
|
|
||||
o |
|
||||
где – N0 – спектральная плотность мощности шума, Вт Гц ;
Гц ;
– Пш H f 2 df – полоса, эквивалентная по шуму, или просто шумовая
0
полоса фильтра приема с амплитудно-частотной характеристикой H ( f ) . Амплитудно-частотная характеристика приемника H ( f ) непременно
обеспечивает компромисс между двумя противоречивыми целями. Во-первых, она должна минимизировать мощность шума, проходящего к решающему устройству, т.е. минимизировать Пш (5.8). Во-вторых, должна быть в
максимально возможной степени увеличена разница между значениями V иV в моменты принятия решения. Очевидно, что следовало бы сделать
максимальным отношение сигнал-шум V 2  2 на входе решающего устройства, чтобы минимизировать вероятность ошибки. Классический вывод из теории цифровой связи устанавливает, что V 2
2 на входе решающего устройства, чтобы минимизировать вероятность ошибки. Классический вывод из теории цифровой связи устанавливает, что V 2  2 становится максимальным, когда
2 становится максимальным, когда
149
амплитудно-частотная характеристика приемника H ( f ) «согласована» с
энергетическим спектром принимаемого сигнала.
При рассмотрении во временной области характеристика согласованного фильтра реализуется путем умножения принимаемого сигнала на каждый из видов импульсов (без шума), которые могут быть приняты. Сигналы на выходе умножителей (корреляторов) интегрируются на тактовом интервале для определения результирующего среднего значения коэффициента корреляции в течение этого интервала времени. Интегратор, на выходе которого появится наибольший сигнал, с наибольшей вероятностью указывает на символ, который был передан.
В большинстве систем передачи все сигналы или импульсы имеют одинаковые формы, а различаются только по амплитуде и полярности. Поэтому может быть использован единственный согласованный фильтр. Решение принимается путем сопоставления сигнала на выходе согласованного фильтра с соответствующими уровнями решения. Сигнал на выходе единственного коррелятора h(t) с интегратором имеет вид
T |
|
|
T |
|
|
|
|
||
V S (t )h(t )df |
|
|
|
|
S (t ) |
|
2 dt , |
(5.9) |
|
|
|
|
|||||||
|
|
|
|
||||||
0 |
|
|
0 |
|
|
|
|
|
|
где S(t) – форма сигнала или импульса, подлежащая измерению. |
|
||||||||
Необходимо отметить, что V 2 , по существу, |
представляет собой меру |
||||||||
энергии сигнала на тактовом интервале. |
|
|
|
|
|
|
|
|
|
E V 2T |
, |
|
|
|
|
|
|
(5.10) |
|
s |
|
|
|
|
|
|
|
|
|
где T – длительность символа. |
|
|
|
|
|
|
|
|
|
Используя выражение (5.8) и параметр Es |
(5.10) для |
представления |
|||||||
энергии символа, выразим вероятность ошибки в двоичном сигнале из выражения (5.4)
pош erfc(z) , |
(5.11) |
где z2 Es  N0 Пш .
N0 Пш .
При передаче двоичных сигналов энергия символа Еs равна энергии, приходящейся на бит
Eb V 2Tb , |
(5.12) |
150