

lection_part1-2
.pdfω
 Fk
Fk 

 v F
v F 
Рис. 5.10
Эта сила определяется выражением
→ |
|
→ |
→ |
(5.19) |
F |
= 2m v |
отн |
ω . |
|
k |
|
|
|
Сила Кориолиса отличается от других сил тем, что зависит от относительной скорости тела во вращающейся СО S1. При обращении в нуль этой скорости, обращается в нуль и сила Кориолиса. То есть, если тело по-
коится во вращающейся СО, то на него действует (см. рис. 5.8) центробежная сила инерции, а если движется – то еще и кориолисова сила.
Действием силы Кориолиса объясняется подмывание (обрывистость) правых берегов рек, текущих в океан с юга на север в северном полушарии.
Размышления о свойствах движения в ИСО и неИСО привели А.Эйнштейна к мысли о независимости движения тел в поле сил инерции от их массы, что наблюдается и в гравитационном поле, и формулированию одного из важнейших принципов физики – принципа эквивалентности: свойства движения в неИСО такие же, как и в ИСО при наличии гравитационного поля (т.е. поля сил инерционных и гравитационных эквивалентны – равноускоренная СО эквивалентна однородному гравитационному полю).
Таким образом, если тело двигается равноускоренно под действием гравитационного поля в ИСО, то, переходя в неИСО, где тело покоится, получаем, что его уравновешивает сила инерции. При данном переходе изменяется геометрия пространства – времени, что изучается в общей теории относительности (ОТО) А.Эйнштейна (подробнее об этом см. лекцию 7).
Весом тела называется приложенная к телу сила Рr, равная силе, с которой это тело действует на опору или подвес. При этом предпола-
гается, что опора или подвес покоятся в системе отсчета, в которой взвешивают тело. В среднем P = mgr0 , в общем случае, вес – есть геометриче-
61
ская сумма силы гравитационного притяжения Земли и центробежной силы инерции, вызванной ее вращением.
При ускоренном движении системы могут возникнуть особые состояния, называемыеперегрузками(см. рис. 5.7 ипример) иневесомостью.
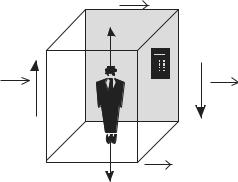
Вспомним известную со школы задачу о лифте (рис.5.11). При сонаправленности ускорения движения лифта а и ускорения свободного падения gr вес тела P=N=m(g-a), т.е., если лифт движется с ускорением a=g, то
Р=0. Это состояние называют невесомостью. Если же ускорения противонаправлены, то P=N=m(g+a). Увеличение веса приводит к перегрузкам.
a |
N |
( a ( |
|
mg |
|
|
Рис. 5.11 |
|
Тяжелые перегрузки и невесомость в повседневной жизни – состояния редкие (быстрая езда в транспорте, полет на самолете, катание на качелях, подъемы и спуски в лифтах), с ними часто приходится сталкиваться лишь космонавтам, которых специально тренируют на центрифугах и в бассейнах для привыкания к состояниям деформации внутренних органов и изменениям внутреннего давления. В космических кораблях невесомость
(движение с ускорением свободного падения) может быть компенсирова-
на путем создания вращения корабля (действием сил инерции), при этом предметы вновь обретут вес, который будет зависеть от скорости вращения.
62
ЛЕКЦИЯ 6. ОСНОВЫ СПЕЦИАЛЬНОЙ ТЕОРИИ ОТНОСИТЕЛЬНОСТИ
1.Принцип относительности в механике (механический принцип относительности Г. Галилея). Преобразования Г. Галилея.
2.Постулаты специальной теории относительности (СТО). Преобразования Х. Лоренца.
3.Следствия из преобразования Лоренца (относительность времени
иего промежутков, линейных размеров вдоль направления движения (длины), релятивистский закон сложения скоростей в СТО, инвариантность пространственно-временногоинтервала).
4.Основной закон релятивистской динамики материальной точки.
5.Закон взаимосвязи массы и энергии. Энергия связи.
6.Вывод преобразований Х. Лоренца.
6.1. Принцип относительности в механике (механический принцип относительности Г. Галилея). Преобразования Г. Галилея
Проведя какой-либо эксперимент и повторяя его при тех же условиях, но в другом месте и в другое время, мы получим те же результаты. Этот факт – воспроизведение лабораторных опытов – естественным образом вытекает из независимости физических законов от таких понятий, как выбор положения системы координат и начала отсчета времени. Это является следствием однородности и изотропности пространства и однородности времени. Наличие этих свойств ведет к тому, что сохраняется часть физических величин: рr , E и т.д. Из опыта следует, что кроме такой независи-
мости имеет место независимость уравнений физики от состояния движения систем, которое заключается в равноправии всех инерциальных систем отсчета.
z |
S |
z1 |
S1 |
|
|
|
|
m |
|
|
|
r |
|
|
|
|
|
r1 |
|
O |
|
|
y |
|
r0 |
|
|
||
|
O |
y |
||
x |
|
|||
|
|
1 |
||
x1 |
1 |
u |
|
|
|
|
|
||
|
|
Рис. 6.1 |
|
|
|
|
63 |
|
|
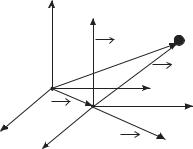
Пусть ИСО S1 движется относительно ИСО S с постоянной скоростью ur (рис. 6.1). Найдем связь между координатами, скоростями и ускорениями точки m в обеих ИСО. Поскольку многие величины изменяются при переходе от одной СО к другой, необходимо всегда указывать, относительно какой СО происходит рассмотрение движения. Именно поэтому го-
ворят, что механическое движение относительно.
В любой момент времени для точки m можно записать:
→ |
→ |
→ |
→ |
→ |
|
r |
= r1 |
+ r0 |
= r1 |
+ u t , |
(6.1) |
что эквивалентно трем скалярным уравнениям: |
|
||||
|
|
x = x1 +uxt, |
|
||
|
|
y = y1 +u yt, |
(6.2) |
||
z= z1 +uzt.
Вклассической механике предполагается, что ход времени не за-
висит от состояния движения ИСО (t=t1 – преобразование Г. Галилея (1564–1642) для времени). Преобразования (6.2) Г. Галилея для коор-
динат верны только для u<<c (с – скорость света в вакууме), в общем случае их необходимо заменять на релятивистские.
Дифференцируя уравнение (6.1) по времени, получаем:
• |
• |
• |
|
|
|
|
→ |
→ |
→ |
→ |
→ |
→ |
|
r |
= r1 |
+ r0 |
≡ v |
= v1 |
+ u . |
(6.3) |
Выражение (6.3) – это классический закон сложения скоростей
(правило сложения): скорость тела относительно неподвижной СО равна векторной сумме скорости тела относительно движущейся СО и скорости движущейся СО относительно неподвижной.
Можно записать: |
vx = v1x + ux; |
|
vy = v1y + u y; |
vz = v1z + uz . |
|||
•• |
•• |
•• |
→ |
→ |
|
→ |
|
→ |
→ |
→ |
|
|
|||
r |
= r1 |
+ r0 ≡ |
а = |
а1 , т.к |
u = const . |
(6.4) |
|
Тогда в силу выражений (6.4) и m=m1 (для u<<c) получаем |
|||||||
|
|
→ |
→ |
→ |
|
→ |
|
|
|
F1 = m a1 |
= F |
= m a , |
(6.5) |
||
т.е. ускорение имеет одно и то же значение в обеих СО, и II закон Ньютона инвариантен (не изменяется его форма записи) относительно перехода от одной ИСО к другой. Можно утверждать, что если в ИСО S тело движется с постоянной скоростью, то и в ИСО S1 характер движения тот же. Если система S ИСО, а S1 движется относительно нее с постоянной скоростью, то система S1 тоже ИСО.
64
Таким образом, равномерное и прямолинейное движение системы как целого не влияет на ход процессов, происходящих внутри системы. В
этом заключается содержание механического принципа относительно-
сти Г.Галилея: никакими опытами, проведенными внутри ИСО, нельзя установить, движется ли она с постоянной скоростью или покоится (или: законы механики Ньютона инвариантны при переходе от одной ИСО к другой). Например, пассажир, читающий газету в поезде, трогающемся мягко, без толчка и с малым ускорением, будет считать себя неподвижным.
6.2.Постулаты СТО. Преобразования Х. Лоренца
Кконцу XIX в. был проведен ряд экспериментов по определению скорости света в вакууме c. Обсуждался важный вопрос: к какой СО относится эта скорость (значение)? Согласно принципу относительности Г.Галилея, говорить о конкретной скорости без указания СО бессмысленно, т.е. скорость света должна быть различна в различных СО, поэтому значение скорости света должно относиться к СО, связанной, например, с источником света. Тогда можно предполагать, что при перемещении источника света относительно неподвижного прибора (наблюдателя), регистрирующего скорость света, этот прибор должен показывать значения как большее, так и меньшее скорости света в вакууме c в зависимости от направления перемещения источника и приемника света.
Первые эксперименты по определению скорости света в движущейся СО были проведены А. Майкельсоном (1852–1931) в 1881г. Позже подобные эксперименты ставились не раз, причем точность определения ско-
рости света возрастала. Оказалось, что с=c1=c2=c.
Классический закон сложения скоростей был подвергнут сомнению. Пришлось признать, что область его применения ограничена, а так как он есть следствие преобразований Г. Галилея, то они не имеют универсального характера. Таким образом, возникла потребность в радикальном пересмотре существующих представлений о пространстве и времени. Эту задачу выполнил в 1905 г. А. Эйнштейн в своей статье «К электродинамике движущихся тел». Он дал основы специальной теории относительности
(СТО). Эйнштейн показал, что преобразования Галилея в неявном виде основывались на двух ошибочных предположениях, казавшихся очевид-
ными: а) одновременность двух событий – абсолютное понятие (t=t1), время во всех ИСО протекает одинаково; б) длина тел (линейный размер) неизменна во всех ИСО.
Специальная теория относительности (СТО) А. Эйнштейна базируется на двух постулатах:
65
1.Принцип относительности – во всех ИСО все физические явления протекают одинаково (обобщения принципа относительности Галилея на все законы природы).
2.Принцип инвариантности скорости света – скорость света в ва-
кууме c не зависит от движения источника света или наблюдателя и одинакова во всех ИСО (утверждается как опытный факт).
В начале XX в. стало ясно, что уравнения физики должны быть пересмотрены. Стали предприниматься попытки записать уравнения движения
иэлектродинамики так, чтобы они были инвариантны относительно пере-
хода от одной СО к другой. |
|
S |
|
S1 |
|
|
|
z |
|
|
|
|
|||
|
|
z1 |
u |
|
m |
||
|
|
r |
|
||||
O |
|
|
r1 |
|
|||
|
|
|
x |
|
|||
r0 |
|
|
|
|
|||
|
O1 |
x |
x |
x |
|||
y |
l1 |
||||||
y1 |
1н |
1к |
1 |
||||
|
|
|
|
|
|
||
|
|
Рис. 6.2 |
|
|
|||
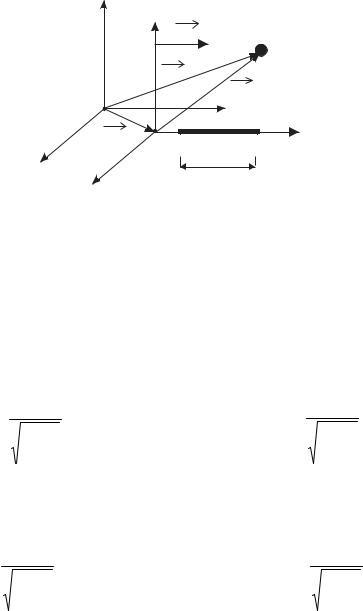
Х. Лоренц (1853–1928) решил (1904г.), что если сделать следующие преобразования координат и времени, то уравнения (60 гг. XIX в.) Дж. Максвелла (1831–1879) будут инвариантны, т.е. не изменят своей формы (в случае направления скорости ur вдоль параллельных осей Ох и О1х1 (рис. 6.2)):
|
S → S1 |
|
|
|
|
S1 → S |
|
||||||||
x = x −ut |
x = x1 + ut1 |
|
|||||||||||||
|
1 |
|
|
|
v2 |
|
|
|
|
v2 |
|
|
|||
|
1 − |
1− |
|
||||||||||||
|
c2 , |
c2 |
, |
||||||||||||
|
|
|
|
|
|
|
|
||||||||
|
y1 = y , |
|
|
|
|
y = y1 , |
(6.6) |
||||||||
|
z1 = z , |
|
|
|
|
z = z1 , |
|
||||||||
|
t − |
ux |
|
|
t1 |
+ |
ux1 |
|
|||||||
t1 |
c2 |
|
|
|
|||||||||||
= |
|
t = |
|
|
c2 |
|
|||||||||
|
|
v2 |
|
|
|
|
v2 |
|
|||||||
|
1 |
− |
1− |
|
|
||||||||||
|
c2 . |
|
c2 . |
||||||||||||
|
|
|
|
|
|
|
|
||||||||
Покажем относительный характер одновременности событий. Пусть система S1 движется со скоростью u относительно системы S, и в начальный момент времени t=0 их начала координат совпадают. Пусть в момент
66
времени t=0 в ИСО S источник излучает импульс света в направлении оси Ох. Тогда, дойдя до некоторой точки с абсциссой x, свет пройдет расстояние х=ct, а в системе S1 – x1=сt1; поскольку x1≠х (так как S1 движется относительно S со скоростью u =const), то и отсчет времени будет иметь относительный характер в силу относительности понятий «подвижная» и «неподвижная» СО.
В уравнениях (6.6) наблюдается симметрия (уравнения обратимы). Преобразования от S к S1 и обратно отличаются знаком перед u, что очевидно, поскольку, если S1 движется относительно S со скоростью u, то система S движется относительно S1 со скоростью (–u).
Это не означает, что описанное ниже замедление времени является кажущимся явлением. Правильнее говорить не об изменении хода времени в разных СО, а о различии протекания локализованного в пространстве временного процесса. Для того чтобы установить, какие часы отстают, необходимо «движущиеся» и «неподвижные» часы свести вместе. Но для этого необходимо или вернуть «движущиеся» часы, или ускорить «неподвижные». Очевидно, что результаты должны зависеть от характера сближения часов, т.к. ускорение абсолютно. Отстанут те часы, которые будут двигаться ускоренно. Именно этим объясняется меньшее старение близне- ца–космонавта, вернувшегося на Землю, по сравнению с другим близнецом – жителем Земли.
Прочитайтепоследние триабзацаещеразпослеизучения всегоматериаладаннойлекции
Таким образом, преобразования Х. Лоренца удовлетворяют СТО,
т.к. все физические явления описываются законами, не меняющимися при преобразованиях. А. Эйнштейн показал, что преобразования (6.6) имеют универсальный характер.
Преобразования Галилея (6.2) являются предельным случаем (6.6) при u<<c (формально в пределе при c→∞) – в этом заключается суть принципа соответствия (каждая новая теория должна заключать в себе предыдущую в качестве частного случая), впервые введенного в научную методологию великим датским физиком Нильсом Бором (1885–1962).
6.3. Следствия из преобразования Лоренца (относительность времени и его промежутков, линейных размеров (длины), релятивистский закон сложения скоростей в СТО, инвариантность пространственно-временного интервала)
Относительность времени:
а. Если два события ((1) и (2)) происходят одновременно (t1(1)=t1(2)) в СО S1 и x1(1)=x1(2) (в одной и той же точке), то и в ИСО S t(1)=t(2), x(1)=x(2) (со-
гласно формуле (6.6)); если же в СО S1 (t1(1)=t1(2)), но x1(1) ≠ x1(2), то в ИСО S не только x(1)≠x(2), но и t(1)≠t(2). Таким образом, события не только про-
67

странственно разобщены, но и не одновременны. В теории вероятности
события, которые могут произойти одновременно, называют совмест-
ными. Для совместных событий как первое может предшествовать второму, так и второе первому в зависимости от координат и скорости u. Несо-
вместными являются события, которые по каким-либо причинам не мо-
гут произойти одновременно, например, события, связанные друг с другом причинно-следственной связью, т.е. одно из событий является причиной (основанием) для наступления второго события (следствия), которое ни при каких обстоятельствах не произойдет раньше причины. Совместность/несовместность, причинно-следственные связи учитывают при релятивистском рассмотрении вопроса о том, какое из событий наступит раньше, а какое – позже.
б. Если длительность события (индексы: (1) – начало, (2) – конец события) в ИСО S ∆τ=t(2)-t(1), то в ИСО S1 ∆τ1 = t1(2) −t1(1) = t(2) −t(1) , где
β2=(u/c)2, т.е. в движущейся ИСО S1 для того, чтобы событие завершилось,
требуется время ∆τ1>∆τ (время идет медленнее в ИСО, относительно которой точка, где происходит событие, покоится).
Относительность линейных размеров вдоль направления движения (лоренцево сокращение длины). Пусть в движущейся ИСО S1 по-
коится стержень (рис. 6.2) длиной l1=x1к-х1н («н» – начало, «к» – конец).
Согласно формуле (6.6) l = x |
− x |
= xк − xн |
= |
l |
, т.е. размеры |
1 1к |
1н |
1 − β 2 |
|
1 − β 2 |
|
стержня, измеренные в ИСО, относительно которой он движется, меньше длины, измеренной в ИСО, относительно которой он покоится: l1>l.
Релятивистский закон сложения скоростей в СТО. Пусть в ИСО
S1 тело имеет произвольно направленную скорость ν , а ИСО S1 движется относительно ИСО S со скоростью u , как показано на рис. 6.2.
С учетом dx = dx1 + udt1 |
; dt = dt1 + |
udx1 |
|
|
|
|
|
|
|
|
|||||||||||
c2 |
|
и по аналогии получают: |
|||||||||||||||||||
|
|
|
|
1 − β 2 |
|
|
|
|
1− β 2 |
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
S1→S |
|
|
|
|
|
÷dt |
|
|
|
|
|
|||
v |
|
= dx |
(6.6) |
dx1 +udt1 |
1− β |
2 |
|
= dx1 +udt1 |
|
v1x |
+u |
||||||||||
|
= |
|
|
=1 |
|
||||||||||||||||
|
x |
dt |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
, |
|||
|
|
1− β2 |
|
dt1 |
+ |
udx1 |
|
|
dt1 |
+ |
udx1 |
|
1+ |
uv1x |
|||||||
|
|
|
c2 |
c2 |
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
c2 |
|||||||
т.к. y=y1 и z=z1, то dy=dy1 и dz=dz1, то
68
|
|
|
dy |
(6.6) |
|
|
1− β |
2 |
÷dt |
v |
1− β 2 |
|
||||
v |
y |
= |
= |
dy1 |
|
|
= |
1 |
1y |
|
|
, |
||||
dt |
|
|
udx1 |
|
|
uv |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
dt1 |
+ |
|
|
|
|
1+ |
1x |
|
|
|
|
|
|
|
|
|
c2 |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
c2 |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
(6.6) |
|
|
1− β |
2 |
÷dt |
1− β |
2 |
|
||||
v |
|
= dz |
= |
dz |
|
|
= |
1 |
v1z |
|
|
||||
z |
|
|
|
|
|
|
. |
||||||||
|
dt |
|
1 |
|
|
|
udx1 |
|
|
|
uv |
||||
|
|
|
|
|
|
dt1 |
+ |
|
|
|
1+ |
1x |
|
|
|
|
|
|
|
|
|
c2 |
|
|
|
||||||
|
|
|
|
|
|
|
c2 |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|||||
В силу симметрии преобразований и по аналогии: S→S1,
|
v |
|
−u |
|
|
|
v |
|
1 − β 2 |
|
|
|
|
v |
|
1− β 2 |
|
||||||
v1x = |
|
x |
|
, |
v1y = |
|
y |
|
|
|
|
, v1z = |
|
z |
|
|
. |
(6.7) |
|||||
|
uv |
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
uv |
|||||||||||||
|
|
|
|
|
uv |
|
|
||||||||||||||||
|
1− |
x |
|
|
|
|
1 − |
x |
|
|
|
|
|
|
1− |
x |
|
|
|
||||
|
c2 |
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
c2 |
|
|||||||||||
|
|
|
|
|
c2 |
|
|
|
|
|
|
||||||||||||
В случае, когда скорость v параллельна скорости u (νy=νz=0), |
|
||||||||||||||||||||||
|
|
|
|
|
|
vx |
= v = |
u + v1 |
. |
|
|
|
|
|
|
(6.8) |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
1+ |
uv1 |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
c2 |
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Формулы (6.7), (6.8) – релятивистский закон сложения скоростей.
Для v<<c формально в пределе при c→∞ получаем классический закон
→ |
|
→ |
|
→ |
|
|
|
|
|
|
|
|
сложения скоростей (6.3): v |
= v1 |
+ u . Если материальная точка движется со |
||||||||||
скоростью с (v1=c), тогда: v = |
|
c + u |
|
= |
|
c + u |
= c . Согласно закону сложения |
|||||
1 + |
cu |
|
1 + |
u |
|
|||||||
|
|
c2 |
|
|
c |
|
||||||
|
|
|
|
|
|
|
|
|
|
|||
скоростей, в теории относительности скорость тела не может быть больше скорости света, что согласуется со II постулатом А. Эйнштейна.
Таким образом, координаты (линейные размеры), время, скорость относительны: их значения различны в различных ИСО. Однако для че-
тырехмерного пространства А. Эйнштейна (пространство-время: 3 ко-
ординаты и время неразрывно связаны между собой) величиной, не зави-
сящей от выбора СО (инвариантной к преобразованиям) является интервал между двумя событиями – пространственно-временной интервал
(в СО S1):
∆s1 =  c2 (t1(2) −t1(1) )2 − (x1(2) − x1(1) )2 − ( y1(2) − y1(1) )2 − (z1(2) − z1(1) )2 =
c2 (t1(2) −t1(1) )2 − (x1(2) − x1(1) )2 − ( y1(2) − y1(1) )2 − (z1(2) − z1(1) )2 =
= c2∆t 2 |
−∆x 2 |
−∆y 2 |
−∆z 2 |
= |
c2∆t 2 |
−l 2 . |
(6.9) |
1 |
1 |
1 |
1 |
|
1 |
1 |
|
69
x2 + y2 + z2 = R2 – уравнение сферы, если источник света находится в центре сферы, то за некоторое время t (R=ct) свет дойдет от центра до
поверхности сферы, т.е. равенство x2+y2+z2–(ct)2=0 должно быть справедливым в любой СО, т.е. x12+ y12+ z12–(ct1)2= x2+y2+z2–(ct)2.
Покажем на основании формулы (6.6), что
|
∆s = ∆s = c2∆t2 −∆x2 −∆y2 −∆z2 ; |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∆x 2 |
= |
|
∆x |
−u∆t |
2 |
= |
∆x |
2 |
− 2∆xu∆t +u |
2 |
∆t |
2 |
|
|
|
|||||||||||||||||||||||||||||||||
а ∆y=∆y1, ∆z=∆z1, |
|
|
|
|
|
|
|
|
|
, |
|
|
||||||||||||||||||||||||||||||||||||||
|
1 |
|
|
|
1 |
− β |
2 |
|
|
|
|
|
|
|
|
|
|
|
1− β |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
∆t − |
|
u∆x |
2 |
|
∆t |
2 |
− 2 |
∆tu∆x |
+ |
∆x2u2 |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
c |
2 |
|
|
|
|
|
|
|
|
|
c2 |
|
|
|
|
|
|
c4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
∆t 2 |
= |
|
|
|
|
|
|
|
= |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
1 |
|
|
1 − β 2 |
|
|
|
|
|
|
|
|
|
|
|
|
u 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
− |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
c |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Тогда |
|
∆s 2 |
= c2∆t |
2 − ∆x 2 − ∆y |
2 |
− ∆z 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
= |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
|
|
|
|
1 |
|
|
|
II |
1 |
|
|
|
|
|
1 |
|
|
|
1 |
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
I |
|
|
|
678 |
|
|
|
|
II |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
I |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
678 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
678 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
} |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
c2∆t2 − 2∆tu∆x + ∆x2u2 |
− ∆x2 + 2∆xu∆t −u2∆t2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||
= |
|
|
|
|
|
|
c2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
− ∆y |
2 |
− ∆z |
2 |
= |
||||||||||||
|
|
|
|
|
|
|
|
u 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
1− |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
c |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
u |
2 |
|
|
|
|
|
|
2 |
|
u |
|
2 |
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
c |
∆t |
2 |
|
|
|
− ∆x |
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 − |
|
|
|
|
|
|
|
1 |
− |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
c |
|
|
|
|
|
|
|
|
c |
|
|
|
|
|
|
|
|||||||||||||||
(I иII - слагаемыедлягруппировки)= |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
− ∆y2 − ∆z2 = |
||||||||||||||||
|
|
|
|
|
|
|
|
1 − |
u |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
c |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
= с2∆t2 − ∆x2 − ∆y2 − ∆z2 = ∆s2
что и требовалось доказать.
Если ∆s2>0, то он действителен и называется временноподобным, если ∆s2<0, то это – мнимая величина и называется пространственноподобным.
Итак, существует кинематический инвариант – пространственно-
временной интервал. Поэтому, несмотря на относительность длины и
промежутков времени, течение событий носит объективный характер и не зависит от выбора СО. Пространство и время связаны между собой и образуют единую форму существования материи: пространствовремя.
Дальнейшее развитие теории относительности (общая теория относительности) показало, что свойства пространства-времени в данной об-
70