

lection_part1-2
.pdfлезной массе m=20 тонн (т). Для сравнения: масса Метагалактики (доступной обнаружению современными методами радиоастрономии части Вселенной) по приблизительным оценкам М≈1053 кг.
ЛЕКЦИЯ 3. РАБОТА И МЕХАНИЧЕСКАЯ ЭНЕРГИЯ
1.Работа силы, мощность.
2.Механическая (кинетическая и потенциальная) энергия. Закон сохранения механической энергии. Графическое
представлениеэнергии. Коэффициентполезногодействия(КПД). 3. Теория удара.
3.1.Работа силы, мощность
Вкачестве единой количественной меры различных форм движения материи и соответствующих им взаимодействий в физике вводится скалярная величина – энергия.
Вмеханике рассматривают механическую энергию (энергию механического движения и механических взаимодействий). Для количе-
ственного описания обмена энергии между телами используют понятие
работа силы. Элементарной работой δA силы F на малом перемещении drr точки О приложения силы называется скалярное произведение:
|
|
→ → |
→ → (*) |
|
|
δA = F d r |
= F v dt = Fds cos α , |
где |
r |
– радиус-вектор точки О; |
|
v – ее скорость; |
|
||
dt – малый промежуток времени, в течение которого сила шает работу δA;
(3.1)
F совер-
α – угол между направлением действия силы F и направлением перемещения dr (или v ).
Если угол α–острый, то δA>0 и сила ускоряющая, если угол α–
тупой, то δA<0 и сила тормозящая (трения, например). Переход (*) в уравнение (3.1) справедлив в силу равенства ∆t = dt → 0 drr = ds . Из
уравнения (3.1) следует, что сила не совершает работу, если точка приложения силы неподвижна ( drr = 0 ) и если сила направлена перпенди-
кулярно (по нормали) к траектории ( F vr).
21

Таким образом, работа силы на участке траекторий от точки 1 до точки 2 равна алгебраической сумме элементарных работ на отдельных, бесконечно малых участках:
2 → →
A = ∫ F dr
1
= 2∫ |
F(s)cosαds . |
(3.2) |
1 |
14243 |
|
|
Fs |
|
Геометрически работа – это площадь под кривой (рис. 3.1).
FS |
δA |
|
|
dS |
S |
|
Рис. 3.1 |
|
Если Fr = const , то A = Fs |
2∫ds = Fs cosα . Сила называется по- |
|
1 |
тенциальной (консервативной), если ее работа зависит только от начального и конечного положений тела и не зависит от формы ее траектории. Для таких сил интеграл по замкнутому контуру L равен
→ →
A = ∫ F dr = 0. Для диссипативных сил работа зависит от формы тра-
L
ектории при перемещении тела (сила трения).
|
Чтобы охарактеризовать скорость совершения работы, вводят поня- |
||||||
тие мощности N = |
dA |
. |
За время dt сила F совершает работу(δA = Frdrr) и |
||||
|
|||||||
|
|
|
|
dt |
|
||
мощность |
силы в |
данный момент (мгновенная мощность) равна |
|||||
|
→ → |
|
|
|
|
||
|
F d r |
|
→ → |
|
|||
N = |
= F v . Единицы измерения: [A]=Дж; [N]=Ватт – Вт. |
||||||
dt |
|||||||
|
|
|
|
|
|||
3.2. Механическая (кинетическая и потенциальная) энергия. Закон сохранения механической энергии. Графическое представление энергии. Коэффициент полезного действия (КПД)
Кинетическая энергия (КЭ) системы – это энергия механического
движения этой системы. Сила F , действующая на покоящееся тело и вызывающая его движение, совершает работу; энергия движущегося тела возрастает на величину затраченной работы. Таким образом, работа dA си-
22
лы на пути, который тело проходит от нулевой скорости до скорости v , идет на увеличение КЭ тела Т:
r r |
= |
mdv |
→ |
→ → |
v |
mv2 |
. (3.3) |
dA = dT = Fdr |
dt |
dr = m v dv = mvdv T = ∫mvdv = |
2 |
||||
|
|
|
|
0 |
|
||
Кинетическая энергия Т является функцией состояния движе-
ния тела. Поскольку скорость v зависит от выбора СО, КЭ тела в различных инерциальных системах отсчета (ИСО) имеет разные значения,
определяемые согласно теореме Кёнига: КЭ системы материальных то-
чек равна сумме КЭ всей массы системы, мысленно сосредоточенной в ее центре масс и движущейся вместе с ним, и КЭ той же системы в ее относительном движении по отношению к поступательно движущейся системе координат с началом в центре масс.
Потенциальная энергия (ПЭ) – это механическая энергия систе-
мы тел, определяемая их взаимным расположением и характером сил
взаимодействия между ними.
Телу присуща потенциальная энергия U, если оно находится в поле потенциальных (консервативных) сил. Работа консервативных сил на элементарном перемещении равна приращению энергии U, взятому со знаком «–», так как работа совершается за счет убыли потенциальной энергии (зная U=f(r), можно определить модуль и направление силы F):
dA = −dU = Fdrr, |
(3.4) |
→→
тогда U = −∫F d r +const , т.е. энергия U определяется с точностью до не-
которой произвольной постоянной, но это не влияет на физические законы, так как в них, обычно, входят или разность энергий, или их производные по координатам. Нулевой уровень ПЭ выбирается произвольно из соображений удобства, поэтому может быть как больше, так и меньше нуля. Согласно уравнению (3.4) для консервативных сил можно записать:
F = −∂U ; F = −∂U |
; F = −∂U |
→ |
→ |
→ |
|||||||||
; F |
= −gradU = − U , (3.5) |
||||||||||||
x |
∂x |
|
y |
|
|
∂y |
|
z |
∂z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
→ |
∂U → |
+ |
∂U → |
+ |
∂U → |
– градиент |
скаляра |
U, обозначается |
|||||
где gradU = |
∂x |
i |
∂y |
j |
∂z |
k |
|||||||
|
|
|
|
|
|
|
|
|
|
||||
→
U (набла) и называется оператором Гамильтона или набла-оператором; i , j,k – единичные векторы координатных осей (орты).
Конкретный вид функции U=f(r) зависит от характера силового
поля. Так, тело, находящееся на высоте h<<RЗемли от поверхности земли в поле сил тяготения, обладает потенциальной энергией:
23
∆U = −Aконсерв |
= RЗемли∫ |
+h Fdr = RЗемли∫ |
+h G mMЗемли dr = |
||||
тяготен |
RЗемли |
|
RЗемли |
r2 |
|||
|
|
||||||
|
|
|
|
|
|
|
(3.6) |
1 |
|
|
1 |
|
≈ m GMЗемли2 h = mgh, |
||
= − GmMЗемли |
|
− |
|
=U |
|||
(h + RЗемли) |
|
||||||
|
|
RЗемли |
|
RЗемли |
|||
где Атяготконсерв - работа консервативных сил тяготения. Энергия же сил тяготения отрицательна:
U (r) = −G Mm |
+ const . |
(3.6') |
r |
|
|
Подобно выражению (3.6) находится работа переменной силы тяжести при удалении ракеты на расстояние h от центра Земли, сравнимое по величине с RЗемли, с учетом того, что сила и перемещение противонаправлены.
Аналогично, при упругих деформациях, деформирующая сила по
III закону Ньютона равна по величине упругой силе kx. Элементарная ра-
бота: dA=kxdx, а полная работа |
|
A = x∫kxdx = kx2 |
ПЭ |
упруго– |
||
деформированного тела |
|
0 |
2 |
|
|
|
kx |
2 |
|
|
|
|
|
U = |
. |
|
|
(3.7) |
||
2 |
|
|
|
|||
|
|
|
|
|
|
|
Потенциальная энергия системы является функцией ее состояния. Она зависит только от взаимного расположения тел (конфигура-
ции) системы и от ее положения по отношению к внешним телам. Полная энергия тела складывается из его кинетической и потенци-
альной энергий: E=T+U.
Рассмотрим систему материальных точек массами m1,…,mn, движущихся со скоростями v1,...,vn . Обозначим равнодействующие внутренних
→ →
консервативных сил F1,..., Fn , а внешних консервативных сил – F1/ ,..., Fn/ ;
→ →
внешние неконсервативные силы обозначим f1 ,..., fn .
При v<<c массы тел не меняются и уравнения II закона Ньютона имеют следующий вид:
24
|
|
→ |
|
→ |
|
|
|
|
m |
dv |
→ |
/ |
|
→ |
|
|
|
1 |
= F + F |
+ f , |
|
|||||
|
1 |
dt |
1 |
1 |
|
1 |
|
|
................................ |
(3.8) |
|||||||
|
|
|
|
|
|
|
|
|
|
|
→ |
|
→ |
|
|
|
|
m |
|
→ |
→ |
. |
||||
dvn = F |
+ F / + f |
n |
||||||
|
n |
dt |
n |
n |
|
|
||
|
|
|
|
|
|
|
|
|
Двигаясь под действием сил, материальные точки за время dt пере-
→→
мещаются на расстояние dr1,..., drn . Умножим уравнения (3.8) на соответствующие перемещения (для i-го случая):
|
→ |
|
|
→ |
|
|
|
|
|
|
|
dv |
→ |
→ |
→ |
|
→ → |
|
|||
m |
+ F |
/ |
= |
(3.9) |
||||||
i dr |
− (F |
|
) dr |
f |
dr . |
|||||
i |
dt |
i |
i |
i |
|
i |
|
|
i i |
|
|
|
|
|
→ |
|
→ |
|
|
|
|
Сложим уравнения (3.9) с учетом dri / dt = vi |
|
и (3.3), (3.4): |
|
|||||||
|
→ |
|
|
→ |
|
|
|
|
|
|
|
→ |
|
→ |
|
→ |
|
→ → |
|
||
∑mi vi dvi |
−∑(Fi |
+ Fi / )dri = |
∑ fi dri |
|
||||||
i |
|
|
i |
|
|
|
i |
|
|
|
или |
dT +dU = dA12неконс. |
|
|
|
(3.10) |
|||||
Переход системы из состояния 1 в состояние 2. (3.10) – закон изме-
нения механической энергии.
Если внешние неконсервативные силы отсутствуют, то
E=T+U=const. (3.11)
Формула (3.11) – закон сохранения механической энергии: в системе тел, на которые действуют только консервативные силы, полная механическая энергия сохраняется, то есть не изменяется со временем (нет ее диссипации, т.е. рассеяния).
При этом может возникнуть вопрос: "А как же быть с внешними консервативными силами?" Ответ: "Если внешние консервативные силы нескомпенсированы, то в систему включают тела, воздействующие этими силами, т.е. такие силы можно сделать «внутренними»".
Закон сохранения энергии является следствием фундаментального свойства времени – однородности. Однородность времени заключается в том, что физические законы инвариантны относительно выбора начала отсчета времени.
Во многих случаях потенциальная энергия является функцией только одной координаты U=U(x). График зависимости U от какого-то одного аргумента называется потенциальной кривой.
25

U |
|
E |
|
T |
|
|
|
|
α |
U |
h |
|
|
|
|
Рис. 3.2 |
|
Анализ потенциальных кривых позволяет определить характер движения тела. Особый случай представляют консервативные и замкнутые системы, в которых
E=U+T=const.
Например, на рис. 3.2 приведено графическое представление потенциальной энергии тела в поле сил тяготения, с учетом уравнения (3.6) тангенс угла наклона зависит от массы тела: tgα=mg.
Для ПЭ (рис. 3.3) сжатой пружины функция U(x) имеет вид параболы В точках ± xm – ПЭ достигает максимума (КЭ Т=0). Система не может выйти за пределы ± xm; говорят, что она находится в потенциальной яме.
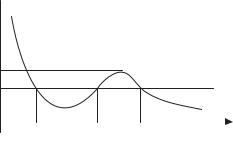
В общем случае функция U(x) может иметь сложный график (см., на-
пример, рис. 3.4).
U E
E
-xm 0 +xm x
x
Рис. 3.3
Частица, обладая энергией E, как показано на рисунке, может находиться только в областях II и IV. Перейти из области II в область IV частица не может: область III является потенциальным барьером, для преодоления которого частице надо сообщить дополнительную энергию (U1-E). В
точке минимума производная dU/dx=0, т. е. в этой точке находится положение равновесия.
26
Коэффициентом полезного действия (КПД) называется отношение полезной (для какой-то практической цели) совершенной работы (энергии) ко всей работе, совершенной системой (к поступившей в систему
энергии):
η = Aполезн |
= |
Еполезн |
|
||
|
Асоверш |
|
|
. |
(3.12) |
|
|
Есоверш |
|
||
U
U1
E
|
|
|
|
x |
|
I |
II |
III |
VI |
||
|
Рис. 3. 4
3.3. Теория удара
Удар абсолютно упругих и неупругих тел является ярким примером выполнения законов сохранения импульса и энергии. Под ударом
(столкновением) в физике понимают взаимодействие тел при их сближении, которое длится очень короткое время, и условии, что на достаточно большом расстоянии тела можно рассматривать как свободные.
В механике рассматривают удары, предполагающие контакт между телами (удары бильярдных шаров, метеорита о землю, попадание пули в
тележку с песком). Ударные Fудар dp/dt=∆p/∆t (или мгновенные (∆t мкс))
силы взаимодействия между соударяющимися телами столь велики, что
внешними силами можно пренебречь и считать для таких систем законы сохранения импульса и энергии выполненными. Тела во время удара испытывают деформации (упругие или неупругие). КЭ тел во время удара преобразуется в ПЭ упругого соударения, а затем частично или полностью вновь переходит в КЭ. Плоскость контакта называется плоскостью удара, а прямую, ей перпендикулярную и пересекающую ее в точке соприкосно-
вения, называют линией удара. Если линия удара параллельна скоростям сталкивающихся тел, удар называется прямым; если эта линия проходит через центры сталкивающихся тел, удар называют централь-
ным. Скорость тел не достигает своего прежнего значения после удара. Отношение нормальных составляющих скорости после и до удара
называют коэффициентом восстановления (скорости): ε = vn/  vn . Если ε=0 – абсолютно неупругий удар (АНУ), ε=1 – абсолютно упругий удар
vn . Если ε=0 – абсолютно неупругий удар (АНУ), ε=1 – абсолютно упругий удар
27

(АУУ). Для шаров из слоновой кости коэффициент ε=0,89, из стали –
ε=0,56, а для свинцовых – ε=0,01 т.е. для реальных тел 0<ε<1.
Рассмотрим применение законов сохранения для прямого центрального удара двух шаров.
ν1 |
ν2 |
|
x |
|
Рис. 3.5 |
Абсолютно упругий удар (АУУ). Пусть v1 и v2 – скорости тел до, а v'1 и v'2 – после удара (рис. 3.5). В случае, если скорость v2 направлена навстречу v1 , в формулах ниже учитывают, что проекция скорости v2 будет равна v2 и все рассуждения остаются верными.
Для АУУ выполняются законы сохранения импульса (так как импульс – векторная величина, то записан в проекции на ось Ох) и энергии:
|
|
|
|
m1v1 + m2v2 = m1v1′ + m2v2′ . |
|
|
|
(3.13) |
||||||||||
|
|
|
m v2 |
+ |
m v2 |
m (v' |
)2 |
+ |
m (v' |
2 |
)2 |
(3.14) |
||||||
|
|
|
1 |
1 |
|
2 |
|
2 = |
|
1 1 |
|
2 |
|
, |
||||
откуда |
|
2 |
|
|
|
2 |
|
|
2 |
|
|
2 |
|
|
|
|
||
|
′ |
|
|
|
|
′ |
|
|
|
|
|
|
|
|
|
|
||
|
m (v |
= m |
|
− v |
|
) |
|
|
|
|
|
|
|
|||||
|
− v ) |
(v |
|
|
v1 + v1′ = v2′ + v2 |
|
||||||||||||
|
1 |
1 |
1 |
|
|
2 |
|
2 |
2 |
|
|
(3.15) |
||||||
|
m1(v12 − (v'1 )2 ) = m2 ((v'2 )2 − v22 ) |
|
|
|
|
|
||||||||||||
|
Выражая |
|
одну |
|
|
|
из |
|
скоростей |
|
|
((3.13), |
(3.15)) |
|||||
v2′ = |
m1v1 + m2v2 |
− m1v1′ |
|
m1 |
v1 |
+ v2 |
|
m1 |
, |
v'2 |
= v1 + v'1−v2 и приравни- |
|||||||
m |
|
|
= m |
|
− m |
|||||||||||||
|
2 |
|
m1 |
|
|
2 |
|
|
m1 |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
, группируем |
|
|
|
|
||||||
вая их v1 + v1′ − v2 = m v1 |
+ v2 − m |
|
|
|
|
|||||||||||||
|
|
|
2 |
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
m1 |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
′ |
|
|
|
|
|
m1 |
|
, |
|
|
|||||
|
|
|
v1 1 |
+ m |
|
= 2v2 + v1 m |
−1 |
|
|
|||||||||
|
|
|
|
|
|
2 |
|
|
|
|
|
2 |
|
|
|
|
|
|
откуда получаем
28

|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
m1 |
|
|
|
|
2m v |
+ v (m |
− m ) |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
2v2 + v1 m |
|
−1 |
= |
, |
|
|||||||||||||
|
|
v1′ = |
|
m1 |
|
|
2 |
m + m |
|
2 |
|
|
|||||||||
|
|
|
|
|
2 |
|
|
|
2 |
1 |
1 |
|
|
|
|
||||||
|
|
|
|
1+ m |
|
|
|
|
|
|
2 |
1 |
|
|
|
|
|
||||
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
2m1v1 + v2 (m2 |
− m1) |
|
|
|
|
|
|
|||||
|
|
|
|
′ |
= |
|
|
. |
|
|
|
(3.16) |
|||||||||
|
|
|
|
v2 |
|
|
|
|
m1 + m2 |
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
При анализе упругих столкновений удобно один из шаров представ- |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
→ |
→ |
→ |
). |
|
||
лять покоящимся (относительно шара m2 скорость v1/ |
= v1 |
−v2 |
|
||||||||||||||||||
|
Рассмотрим частный случай: |
АУУ – прямой центральный (лобо- |
|||||||||||||||||||
вой) |
удар при ν2=0. Тогда из формулы |
|
(3.16) |
|
v′ = |
v1 (m1 − m2 ) |
и |
||||||||||||||
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
m2 + m1 |
|
|
2m1v1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
v2′ = |
получают: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
m1 + m2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
′ |
|
|
|
′ |
= v1 (как бы «передача скорости»); |
|||||||||||||
|
а) m1=m2, тогда v1 |
= 0,v2 |
|||||||||||||||||||
б) m1>m2, тогда v1′ > 0,v2′ > 0 (оба мяча движутся в направлении ско-
рости первого мяча до удара);
в) m1<m2, тогда v1′ < 0,v2′ > 0 (первый мяч отскочит от второго);
г) m1<<m2, тогда v1′ ≈ v1,v2′ ≈ 0 (мячик отскочит от стены, см. рис.
3.6, pстены − m1v1 = m1 pстены = 2 pмяча)
ν1
ν1/ x
Рис. 3.6
Рассмотрим частный случай: АУУ – непрямой нецентральный удар при ν2=0 и m1<<m2 (мяч ударяется о стенку, см. рис. 3.7). Для определения импульса, переданного стене, воспользуемся результатами пункта г) решения предыдущего примера с учетом проекций импульса на ось Ох. В данном случае:
29
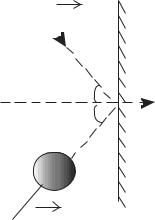
рстены(Ox) = 2 рмяча(Ox) = 2m1v1 cosα .
Равенство углов падения и отражения в рассматриваемом случае следует из закона сохранения механической энергии при АУУ.
 ν1
ν1
α
α x
 ν1/
ν1/
Рис. 3.7
В случае нецентрального удара частицы разлетаются под углом, причем угол, на который изменяется направление скорости налетающей частицы, называется углом рассеяния.
При m1=m2 угол рассеяния – прямой, при m1<m2 угол рассеяния любой (даже рассеяние назад), при m1>m2 тяжелая частица не может откло-
ниться на угол, превышающий ϕ = arcsin m2 . m1
Рассмотрим частный случай: АУУ – прямой нецентральный удар при ν2=0 и m1=m2=m (шары в бильярде, см. рис. 3.7).
Из формул (3.13) и (3.14) имеем: v1 = v1′cos β + v2′ cosα и
v12 = (v1′)2 + (v2′ )2 (*), из треугольника скоростей (рис. 3.8) по теореме косинусов:
v12 = (v1′)2 + (v′2 )2 + 2v1′v′2 cos[180o −(α + β)],
442443
(*)
откуда с учетом (*) 2v1′v′2 cos[180°-(α+β)]=0, cos[180°-(α+β)]=0 и
α+β=90°, т.е. при прямом нецентральном ударе бильярдные шары разле-
тятся под прямым углом.
30