

lection_part1-2
.pdfν1 |
ν2/ |
|
α |
x |
|
|
β |
ν1/
Рис. 3.8
Абсолютно неупругий удар (АНУ). В этом случае тела объединяют-
ся и двигаются как одно целое. Потеря механической энергии при неупругом ударе происходит потому, что в этом случае помимо сил, пропорциональных деформациям, действуют силы, пропорциональные скорости – подобные силам сопротивления. При АНУ выполняется закон сохранения импульса и рассеивается часть КЭ ∆T:
m1v1 + m2v2 = (m1 + m2 )U ,
|
|
|
m v2 |
|
|
m |
v2 |
|
|
|
(m + m |
)U 2 |
|
|
||||||||||
|
|
|
1 1 |
+ |
2 |
2 |
|
= |
|
1 |
|
2 |
|
|
+ ∆T . |
|
||||||||
|
|
2 |
2 |
|
|
|
2 |
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
Тогда |
U = |
m1v1 + m2v |
|
и |
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
m1 + m2 |
|
|
|
|
|
|
|
|
|
(U ) |
|
|
|
|
||||||
|
(m |
+ m |
)U |
2 |
|
m v2 |
|
m |
v2 |
|
|
m m |
2 |
|
||||||||||
∆T = |
1 |
2 |
|
|
− |
|
1 1 |
+ |
2 |
2 |
|
|
= |
1 |
|
|||||||||
|
2 |
|
|
|
|
2 |
|
2(m + m |
) |
|||||||||||||||
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 2 |
|
|||||
(3.17)
(v1 −v2 )2 .
Рассмотрим частный случай АНУ: молот(ок) m1 забивает сваю (гвоздь) m2, т.е. ν2=0, тогда
U = |
m1v1 |
|
|
|
|
m1m2 |
|
|
|
2 |
|
|
m2 |
|
|
|
|
|
и ∆T = |
|
|
v1 |
= |
|
|
T1 , |
|||||||
m + m |
|
|
|
|||||||||||||
2 |
2(m + m |
) |
(m + m |
) |
||||||||||||
1 |
|
|
|
1 |
2 |
|
|
|
|
|
1 |
2 |
|
|
||
а для удара |
|
|
∆T |
|
m2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
η = |
= |
|
|
|
|
. |
|
|
|
|
|
||
|
|
|
T |
(m + m |
) |
|
|
|
|
|
||||||
|
|
|
|
1 |
|
1 |
|
2 |
|
|
|
|
|
|
|
|
Чем больше величина m1 по сравнению с m2, тем больше КЭ ∆T и, следовательно, КПД – η.
31
ЛЕКЦИЯ 4. ДИНАМИКА ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ
1.Момент инерции материальной точки и твердого тела (ТТ). Теорема Гюйгенса-Штейнера.
2.Момент силы и момент импульса относительно неподвижного начала. Основной закон динамики вращательного движения. Закон изменения момента импульса. Кинетическая энергия вращения.
3.Гироскоп.
4.Законы сохранения и симметрия пространства-времени.
4.1.Момент инерции материальной точки и твердого тела. Теорема Гюйгенса-Штейнера
Движение твердого тела (ТТ), при котором все точки прямой OO/, жестко связанной с телом, остаются неподвижными, называется вращени-
ем тела вокруг неподвижной оси вращения OO/.
При рассмотрении вращательного движения пользуются понятием момента инерции материальной точки и ТТ, являющимся наряду с массой
мерой инертности тела, но при непоступательном (вращательном)
движении. С точки зрения инерции важна не только масса, но и расстояние ее от оси вращения.
Моментом инерции материальной точки I относительно заданной оси называется физическая скалярная величина, равная произведению мас-
сы m на квадрат ее расстояния r2 до оси: |
|
|
I = mr 2 ; |
(4.1) |
|
для системы материальных точек: |
|
|
I = ∑mi ri |
2 . |
(4.2) |
i |
|
|
Момент инерции тела относительно какой-либо оси можно определить расчетом или экспериментально. В случае непрерывного распределения вещества (массы) в теле (ТТ) расчет сводится к вычислению интеграла по всему его объему V (массе) (мысленно разбиваем обычно однородное тело на материальные точки dm):
I = ∫r2dm . |
(4.3) |
V |
|
Аналитическое вычисление интегралов возможно лишь в простейших случаях – для тел правильной геометрической формы (цилиндр (стер-
32
жень, кольцо, диск), параллелепипед, шар и т.д.), для тел неправильной формы интегралы находятся численно.
Вычисление моментов инерции во многих случаях можно упростить, используя соображения подобия и симметрии, а также теорему Гюйгенса-Штейнера (Х.Гюйгенс (1629–1699), Я. Штейнер (1796–1863)) и ряд некоторых соотношений.
dm
r
r/
O a A
Рис. 4.1
Найдем связь между моментами инерции тела относительно двух неподвижных параллельных осей. Пусть оси перпендикулярны плоскости рисунка и проходят соответственно через точки О и А (все точки находятся в плоскости рис. 4.1). Используя теорему косинусов для данного треугольника, получают:
|
(r/)2 =r2 +a2 |
→→ |
|
|
|
|
|
|
−2(ar), |
|
|
|
|
|
|
тогда интеграл (4.3) примет вид |
|
|
→ → |
|
|
||
∫(r / )2 dm = ∫r 2dm + a2 |
∫dm − |
|
|
|
|||
2 a |
∫r dm . |
|
|||||
14243 |
123 |
|
|
|
|
|
|
I A |
IO |
|
|
|
|
|
|
|
|
|
|
|
|
→ |
→ |
Последнее слагаемое можно представить в виде ∫r dm = m RC , где
RC – составляющая радиуса-вектора центра масс С тела относительно оси О, параллельная плоскости рисунка. Здесь следует вспомнить, что
|
|
→ |
|
→ |
|
∑mi ri |
|
r |
= |
i |
для дискретного распределения массы, т.е. в системе матери- |
|
|||
C |
|
∑mi |
|
|
|
|
|
|
|
i |
|
альных точек (см. лекцию 2, п. 2.3), а в случае непрерывного распределе-
|
|
→ |
|
|
|
|
→ → |
||
ния массы R→ |
|
∫ r dm |
|
|
|
|
+ ma2 |
||
= |
. Таким образом, I |
A |
= I |
O |
− 2m(a RC ) . Ес- |
||||
|
|||||||||
C |
|
m |
|
|
|
||||
|
|
|
|
|
|
|
|||
ли же ось О проходит через центр масс тела, то третье слагаемое в правой части равно нулю и получают уравнение, которое выражает теорему Гюйгенса-Штейнера: момент инерции тела относительно какой-либо
33

оси равен моменту инерции его относительно параллельной оси, проходящей через его центр масс С, сложенному с величиной ma2, где а – расстояние между осями, m – масса тела.:
I A = IO + ma2 , |
(4.4) |
Далее вычисляют моменты инерции некоторых тел правильной фор-
мы.
1. Тонкий однородный стержень (длина l, масса m, линейная плотность τ=m/l=const):
а) ось вращения ОО/ проходит перпендикулярно стержню через его центр масс С (рис. 4.2).
O/ A/
l/2 |
|
l/2 |
||
|
||||
|
||||
|
||||
|
||||
|
||||
|
|
|
|
|
|
|
|
|
|
C |
|
dm |
||
|
||||
|
||||
|
||||
|
|
|||
|
|
|||
|
|
|||
O |
|
|
|
A |
|
|
|
||
|
||||
|
||||
|
||||
|
||||
|
||||
Рис. 4.2
В силу симметрии получают:
l / 2 |
l / 2 |
|
τ l |
3 |
= ml |
2 |
|
|
I = 2 ∫r2dm = 2 ∫ |
r2 τ dr = |
|
|
; |
(4.5) |
|||
0 |
0 |
|
12 |
|
12 |
|
|
|
б) ось вращения АА/ проходит перпендикулярно стержню через его конец. По теореме Гюйгенса-Штейнера (4.4) получают:
|
ml 2 |
l |
2 |
|
ml 2 |
|
||
I = |
|
+ m |
|
|
= |
|
|
|
12 |
2 |
3 . |
|
|||||
|
|
|
|
(4.6) |
||||
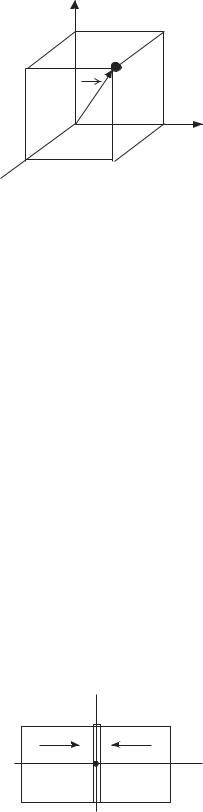
2. Однородные прямоугольная пластина и параллелепипед (ли-
нейные размеры a, b, c, масса m). Согласно теореме Пифагора и формулы (4.1) для точки m (рис. 4.3) имеют:
I x = m( y2 + z2 ) , I y = m(x2 + z2 ) , I z = m(x2 + y2 ) ,
тогда их сумма равна:
I x + I y + I z = 2m(x2 + y2 + z2 ) = 2mR2 .
34
Z |
m(x,y,z) |
R |
O |
Y |
 X
X
Рис. 4.3
Можно увидеть, что если рассматривать любые три взаимно перпендикулярные оси, пересекающиеся в точке О, то моменты инерции Ix, Iy, Iz будут меняться, а их сумма останется постоянной. Обозначив в случае дискретного
распределения масс (система материальных точек) Φ = ∑mi Ri2 или для не-
i
прерывного распределения масс (в твердом теле) Φ = ∫R2dm , можно записать, что
Ix + I y + Iz = 2Φ. |
(4.7) |
На основании вышеизложенного имеем:
а) если дана тонкая прямоугольная пластина, то можно считать, что вещество распределено тонким слоем по плоскости XOY, т.е. z-координаты всех точек ≈0. Тогда формула (4.7) примет вид
I x + I y + I z = 2m(x2 + y2 ) = 2I z , |
(4.8) |
следовательно
I x + I y = I z .
Y
b |
C |
X |
|
||
|
|
a |
Рис. 4.4
35
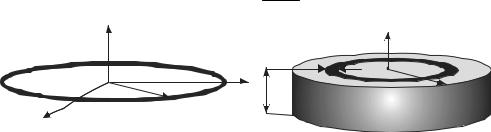
Так как дана тонкая однородная прямоугольная пластина, то представляют, что все вещество смещено (направление смещения обозначено стрелками на рис. 4.4) параллельно оси ОХ и сконцентрировано на оси ОY. При этом расстояния всех материальных точек до оси ОХ не изменятся. В результате получают тонкий однородный стержень массы m и длины b (случай 1, а), а с учетом формул (4.5) и (4.8):
I |
x |
= mb2 |
(аналогично I |
y |
= ma2 |
) I |
z |
= |
m |
(a2 |
+b2 ) . |
(4.9) |
|
||||||||||||
|
12 |
|
12 |
|
12 |
|
|
|
||||
На рис. 4.4 ось OZ проходит через точку С и плоскости XOY – плоскости рисунка;
б) формула (4.9) справедлива и для однородного прямоугольного па-
раллелепипеда. В этом можно убедиться, если мысленно сжать параллелепипед вдоль одной из его геометрических осей в тонкую пластинку. При
этом масса его и расстояния всех точек до этой оси не изменятся.
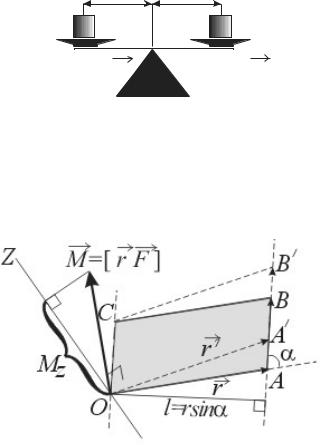
3. Однородное тонкое круглое кольцо (масса m, радиус R,). В силу
симметрии очевидно (рис. 4.5), что |
|
|
|
||
|
|
I z = mR2 , |
|
(4.10) |
|
а с учетом формулы (4.8) в силу симметрии |
|
||||
|
|
I x = I y = |
mR |
2 |
|
Z |
|
2 |
. |
(4.11) |
|
|
|
dr |
Z |
||
C |
R |
|
R |
||
Y h |
|
||||
X |
|
|
|
||
|
|
|
|
|
|
Рис. 4.5 |
|
|
|
|
Рис. 4.6 |
4. Однородный диск или сплошной цилиндр (масса m, радиус R,
объемом V). Начало координат (пересечение) трех взаимно перпендикулярных осей располагают в центре масс цилиндра (можно аналогично случаю 2, а) сместить все вещество вдоль оси ОZ, т.е. получить тонкий диск малой толщины h/, плотности ρ=m/V′, V′=π R2 h′ – объем после смещения, см. рис. 4.6), для которого
36

|
|
R |
R |
|
(π ρ hR |
2 |
)R |
2 |
|
mR |
2 |
|
|
I |
z |
= ∫r2dm =∫r2 (ρ h 2π rdr) = |
|
|
= |
|
. (4.12) |
||||||
2 |
|
|
|
|
|
||||||||
|
0 |
0 |
|
|
|
|
2 |
|
|
||||
|
Согласно уравнению (4.8) имеют: |
mR2 |
|
|
|
|
|
|
|
||||
|
|
|
I x = I y = |
|
|
|
|
|
|
|
|||
|
|
|
|
|
. |
|
|
|
|
|
(4.13) |
||
|
|
|
|
4 |
|
|
|
|
|
||||
Z
R
C Y
X
Рис. 4.7
5. Полый шар с бесконечно тонкими однородными стенками
(сфера массы m, радиуса R). Расположим начало координат (пересечение) трех взаимно перпендикулярных осей в центре сферы, в ее центре масс С (рис. 4.7), тогда в силу симметрии и формулы (4.7):
I |
x |
= I |
y |
= I |
z |
= I = |
2 mR2 . |
(4.14) |
|
|
|
|
3 |
|
6. Сплошной однородный шар (масса m, радиус R, объем V). Рас-
положим начало координат (пересечение) трех взаимно перпендикулярных осей в центре шара и рассмотрим шар как совокупность тонких сфер. Момент инерции такого тонкого сферического слоя по формуле (4.14) будет
иметь вид: |
|
|
|
|
|
dVсф |
|
|
|
|
|
|
|
|
|
dI = |
2 |
r 2dm |
= |
2 |
r 2m |
= |
2 |
r 2m |
4π r 2dr |
= |
2mr 4 |
dr , |
|||
|
|
|
|
|
|
||||||||||
|
3 |
сф |
|
3 |
|
V |
|
3 |
|
|
4 |
π R3 |
R3 |
|
|
|
|
|
|
|
|
3 |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
тогда момент инерции шара:
I = R |
2mr 4 |
dr = |
2 |
mR2 . |
(4.15) |
|
5 |
||||
∫0 R3 |
|
|
|
||
37

В некоторых задачах используется понятие момента инерции относительно точки. Поскольку ориентация различных элементов тела (ТТ) относительно его произвольной точки должна задаваться тремя координатами, то его инертность должна характеризоваться набором 9 чисел – тензором инерции (в математике используются скаляры – одно число, векторы – тройки чисел и тензоры – запись их представляет собой матрицу III порядка).
4.2. Момент силы и момент импульса относительно неподвижного начала.
Основной закон динамики вращательного движения. Закон изменения момента импульса. Кинетическая энергия
вращения (см. также лекцию 1, п.1)
Вращение является составляющей большинства рассматривае-
мых в механике движений. Каждый день мы являемся свидетелями великого космического вращения. Данные последних теоретических исследований говорят, что всё вокруг и мы сами по свойствам напоминаем вращающиеся с большой частотой поля.
Динамические характеристики – момент силы и момент импуль-
са, используемые при описании вращательного движения, играют в тео-
рии вращательного движения такую же большую роль, какую сила и импульс играют в динамике поступательного движения.
Рис. 4.8
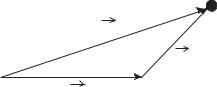
Известно, что передвинуть массивный предмет (например, ящик) вручную тяжело, гораздо легче передвинуть его с помощью длинной палки, трубы (лома), т.е. перекантовать с помощью рычага, причем, чем длинней этот рычаг, тем легче это сделать (прикладывается меньшая сила при большей длине рычага (см. рис. 4.8)). Вспомним знаменитое изречение
Архимеда (ок. 286–212 гг. до н.э.): «Дайте мне точку опоры (и рычаг) и я переверну Землю».
38
Другой пример – взвешивание предметов на весах (см. рис. 4.9): при равных плечах (силы) весов li перевесит тот груз, масса которого mi больше, а если массы грузов равны, то перевесит груз, для которого плечо силы
li больше.
l1 l2
 m1g
m1g  m2g
m2g
Рис. 4.9
Следует различать момент силы и момент импульса относительно точки и относительно оси, в первом случае – это вектора, а во втором – проекции векторов (скаляры).
Рис. 4.10
Пусть дана точка О (полюс), относительно которой находится мо-
мент силы. Моментом силы F относительно точки О называется векторное произведение (вектор) радиуса-вектора r , проведенного из точки О в точку А приложения силы на векторF :
M = [rrF ] |
(4.16) |
Модуль момента силы: |
|
M = rF sinα = Fl , |
(4.17) |
где l=rsinα – кратчайшее расстояние до |
линии АВ действия силы |
(рис.4.10), называемое плечом силы l. |
|
При этом вектор M не изменится, если точку приложения силы F перенести в любую другую точку, расположенную на линии действия силы,
39
например в точку А/. При этом параллелограмм ОАВС перейдет в параллелограмм ОА/В/С. Оба параллелограмма имеют одинаковые основание и высоту,
аследовательно, и площадь.
Вотличие от полярных векторов νr, аr, рr, F (именно их изучают в
школе), вектора, характеризующие вращательное движение
→ → → → →
d ϕ,ω, ε , M , L , не имеют конкретной точки приложения (см. также лекция 1, п.1), их называют скользящими. Так, вектор M можно откладывать от любой точки параллельно одному из направлений, полученному в резуль-
тате векторного произведения (по свойствам векторного произведения r
M перпендикулярно плоскости, в которой лежат два перемножаемых век-
→ → → →
тора – M r , M F ), направление вектора M совпадает с направлением
поступательного движения правого винта при его вращении от вектора r к
Fr (в математике термин – «левая тройка»). r
Главным моментом M нескольких внешних сил, действующих на систему, относительно точки О называется сумма моментов их относи-
тельно этой точки (принцип независимости действия сил):
→ |
→ |
|
→ → |
→ |
→ |
, |
(4.18) |
|
M = ∑M i = ∑ r Fi |
= r Fрезультир |
|||||||
|
i |
i |
|
|
|
|
|
|
где силы Fri считают приложенными к одной точке О, что можно получить путем параллельного переноса векторов Fi (часто в механике для удобства при решении задач силы рассматривают как приложенные к центру масс тела, хотя это не для всех сил так, пример – сила трения Fтр приложена к
поверхности тела).
При вращении ТТ (системы материальных точек) необходимо учитывать только внешние силы, так как внутренние силы взаимодействия двух любых элементов ТТ (системы) всегда равны по модулю (величине) и противонаправлены вдоль одной прямой (их векторная (геометрическая) сумма равна нулю).
Моментом силы относительно некоторой оси OZ (рис. 4.10) называется скаляр – проекция вектора M на эту ось (Mz).
Ось, положение которой в пространстве остается неизменным при вращении вокруг нее тела в отсутствии внешних сил, называется свобод-
ной осью тела. Можно показать, что для тела любой формы и с произвольным распределением массы существуют три взаимно перпендику-
40