

1.4.0. Задачи и методы кинематического анализа механизмов.
основные задачи сост. в определении перемещений, линейных и угловых скоростей и ускорений, звеньев механизма в зависимости от заданного закона движения входного звена (ведущего).
По значению ускорений звеньев угловых и линейных, находят инерционные нагрузки, а затем проводят прочностные расчеты звеньев механизма.
Для определения кинематических зависимостей в механике
1.Графический
2.Аналитический
3.Экпериментальный
1.Графический метод кинематического анализа механизма.
Задана структурная схема мех-ма со всеми линейными размерами звеньев. Схема вычерчивается в линейном масштабе.

Выбираются
масштабы линейной скорости
 и ускорение
и ускорение
 линейного и углового
Для определения
рабочего хода а также траектории точек
звеньев,
линейного и углового
Для определения
рабочего хода а также траектории точек
звеньев,
Мех-м
выч-ся в масштабе
 а также n-ое
число его положений.
а также n-ое
число его положений.
О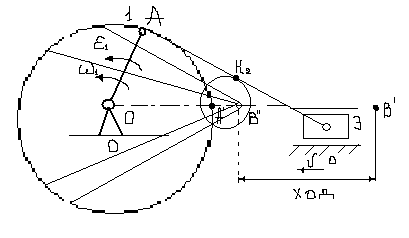 В’’=АВ-ОА
В’’=АВ-ОА
ОВ’=ОА+АВ
Точки звеньев 1 кривошип ; и 2-шатун лежащие по горизонтали наз-ся мертвым положением
B’,B’’-точки мертвого положения
Выводы: 1. При построении плана скоростей векторы абсолютных скоростей всегда начинаются из полюса плана В
2. На плане скоростей имеется ∆ подобно ∆ жесткого звена механизма.
∆акb![]() ∆AKB
в плане схемы мех-ма
∆AKB
в плане схемы мех-ма
3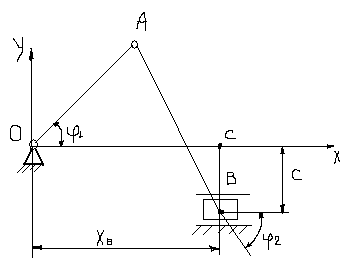 .
Векторы отн-ых скоростей соединяют
концы векторов абсолютных скоростей и
плане направлены к точке кот-ая стоит
первой в обозн-ии отн-ой скорости
.
Векторы отн-ых скоростей соединяют
концы векторов абсолютных скоростей и
плане направлены к точке кот-ая стоит
первой в обозн-ии отн-ой скорости
Аналитический метод определения V и a звеньев заключается в сост. Замкнутого контура векторного в корд Х.У.- разработан ученым Зиновьевым
___ __ __ ___
ОС=ОА+АВ+ВС
ОА=l1 м
АВ=l2 м

Диф-я эти ур-ния по t находим линейные скорости и ускорения звеньев а также угловые скорости и ускорения.
1.5.1.Планетарные передачи. Устройство. Кинематический расчет. Теорема Виллиса.
Механизмы, в составе которых имеется хотя бы одно колесо с перемещающейся в пространстве осью вращения, называются планетарными. Различают три вида таких механизмов: 1)простые, 2)дифференциальные, 3) замкнутые дифференциальные.
Рассмотрим один из простейших дифференциальных механизмов (рис.2.10).Звенья 1 и 3 – центральные колеса, 2 – сателлит, Н –водило. Водило Н и соосные с ним центральные колеса 1 и 3 называются основными звеньями.
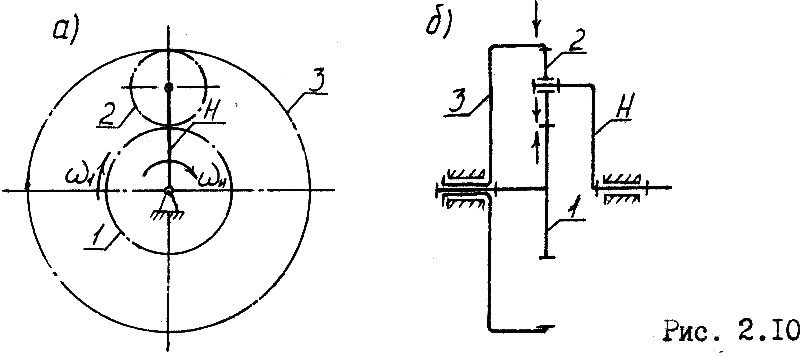
Получим
формулу, связывающую угловые скорости
звеньев в дифференциальном механизме.
Используем метод обращения движения.
Сообщаем всем звеньям механизма
дополнительную угловую скорость, равную
угловой скорости водила Н, но противоположно
направленную, т.е. ( ).
При этом относительное движение звеньев
не изменится, а угловые скорости в
обращенном движении будут следующими:
).
При этом относительное движение звеньев
не изменится, а угловые скорости в
обращенном движении будут следующими:

Таким
образом, так как
 то
дифференциальный механизм превратился
в зубчатый механизм с неподвижными
осями. Для такого обращенного механизма
то
дифференциальный механизм превратился
в зубчатый механизм с неподвижными
осями. Для такого обращенного механизма
 (2.6)
(2.6)
где
 -
передаточное
отношение обращенного механизма,
определяемое через число зубьев
колес:
-
передаточное
отношение обращенного механизма,
определяемое через число зубьев
колес:

Полученное выражение(2.6) называется формулой Виллиса. В общем случае формула Виллиса имеет вид

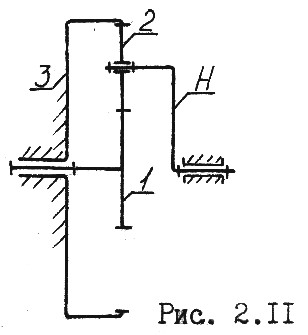
Если в дифференциальном механизме одно из центральных колес сделать неподвижным, то получится планетарный механизм (рис. 2.11).
Так
как
 то из формулы
то из формулы
 получим:
получим:


 (2.7)
(2.7)
Выражение(2.7) называется формулой Виллиса для планетарных механизмов. В общем случае она имеет вид
 (2.8)
(2.8)
где индекс в соответствует неподвижному центральному колесу.
Планетарные механизмы часто называются планетарными передачами. Они позволяют получать большие передаточные отношения при малых габаритах.