

10.Продольная и поперечная деформация и перемещение стержня. Закон Гука.
Под действием внешних сил реальное тело деформируется. При этом первоначальное положение его сечений изменяется. Перемещения вдоль прямой линии называются линейными, а перемещения, вызывающи поворот линий и плоскостей, - угловыми.
Приняты допущения:
-перемещения точек так малы, что не изменяют положения внешних сил
-плоскостные ортогональные сечения остаются одинаковыми как до, так и после перемещения
- перемещения
пропорциональны приложенным внешним
силам
перемещения
пропорциональны приложенным внешним
силам
-Абсолютная продольная деформация:
 Δl>0
– растяж., Δl<0
– сжатие
Δl>0
– растяж., Δl<0
– сжатие
-Абсолютная поперечная деформация:

-Относительная продольная деформация:

- Относительная поперечная деформация:

Экспериментально
установлено, что в пределах применимости
закона Гука поперечная деформация
пропорциональна продольной:  -
коэффициент Пуассона. Характеризует
свойства материала. Определяют его
экспериментальным путём. Для всех
металлов числовые значения этого
коэффициента лежат в пределах 0,25…0,35.
-
коэффициент Пуассона. Характеризует
свойства материала. Определяют его
экспериментальным путём. Для всех
металлов числовые значения этого
коэффициента лежат в пределах 0,25…0,35.
Закон Гука.
Он установил связь
между напряжением, растяжением и
продольной деформацией. где Е
– коэффициент пропорциональности
(модуль упругости материала).
где Е
– коэффициент пропорциональности
(модуль упругости материала).
Модуль упругости характеризует жёсткость материала, т.е. способность сопротивляться деформациям.
ТММ:
Основное: Основные задачи курса ПМ
Целью дисциплины является изучение 3х разделов: сопротивление материалов, теория машин и механизмов, детали машин.
-ОСНОВНОЙ ЗАДАЧЕЙ КУРСА СОПРОТИВЛЕНИЕ МАТЕРИАЛОВ ЗАКЛЮЧАЕТСЯ В УМЕНИИ ПРОИЗВОДИТЬ РАСЧЕТ НА ПРОЧНОСТЬ, жесткость и устойчивость элементов конструкции.
-Основной задачей курса теория машин и механизмов является изучение рабочих поверхностей деталей машин, классификации деталей машин, требований к конструкции деталей машин, изучение критериев работоспособности, изучение методов изготовления деталей машин.
-Основной задачей курса детали машин являются соединения и передачи ( передачи трением и зацеплением)
В курсе прикладной механики изучаются основы современных методов расчета на прочность, жесткость и устойчивость элементов конструкций и деталей машин при статических и динамических воздействиях нагрузок.
Рассматриваются конструкции элементов передач и типовых соединений, широко применяемых в инженерных сооружениях (машинах).
Знание этого курса необходимо для самостоятельного инженерного решения конструкторских, технологических и производственных вопросов.
1.1.1. Механизм. Звено. Кинематическая пара, высшие и низшие кинематические пары . Основные виды механизмов.
Механизм- это система тел, предназначенная для преобразования движения одного или нескольких тел в требуемое движение других твёрдых тел. Если вместо твёрдых тел участвуют газообразные или жидкие, то такие механизмы называются гидравлическими или механическими, в то время как первые называются пневматические.
Любой механизм состоит из деталей- твёрдых тел, изготовленных без технологической сборки, детали объединяют в узлы, имеющие функциональное значение: подшипник, муфта.
Звено- одно или несколько жёстко соединённых между собой твёрдых тел. Из звеньев состоит механизм. Каждый механизм имеет стойко неподвижное звено, входное или ведущее звено, которому задаются начальные параметры, кинематические или силовые, которые называются обобщёнными координатами, а также выходное звено, которое согласно техническому заданию имеет своё функциональное назначение. Соединение 2 звеньев, допускающее их перемещение относительно друг друга образуют кинематическую пару.
Все кинематические пары подразделяются в зависимости от числа наложенных связей и имеют 5 классов. Для пространственного механизма каждый элемент конструкции может иметь 6 степеней свободы.
Для пространственного механизма: H=6-S
Для плоского механизма: H=3-S
Где H- степень свободы; S- наложенные связи
Кинематические цепи- это системы звеньев, созданная с помощью кинематических пар. Различают цепи замкнутые, разомкнутые, простые и сложные.
Низшие кинематические пары- пары, контактирующие на поверхности.
Высшие кинематические пары- пары, контактирующие либо по линии, либо в точке.
Низшие пары предпочтительней применяются в технике, так как контактная линия и точка дают меньшее удельное давление, чем высшие, следовательно, у них меньше износ и больше долговечность.
Механизмы с нулевой степенью подвижности включены в группы Ассура.
Класс группы определяется числом кинематических пар в замкнутом контуре. Эти группы имеют порядок, который определяется кол-м элементов высших кинематических пар. Механизмы бывают: кривошипно-карамысловые, кривошипно-ползунные и кривошипно- шатунные.
1.1.2. Число степеней свободы пространственных и плоских механизмов. Обозначим механизмы для пространственной системы классом который равен наложенным связям для каждой кинематической пары. Примем что механизм состоит из n-числа кинематических пар механизмов и обозначим (P5-при числе наложенных связей =5)(P4-при числе наложенных связей =4)…(P1-при числе наложенных связей =1) и определим степень подвижности пространственного механизма.
W=6n-5P5-4P4-3P3-2P2-P1
Для плоского механизма может быть наложено S-число связей равное 2 (P2), либо число связей S=1 (число пар =1) тогда
W=3n-2P2-P1−формула Чебышева
Плоские механизмы имеют и высшие и низшие кинематические пары.
Пример 1
P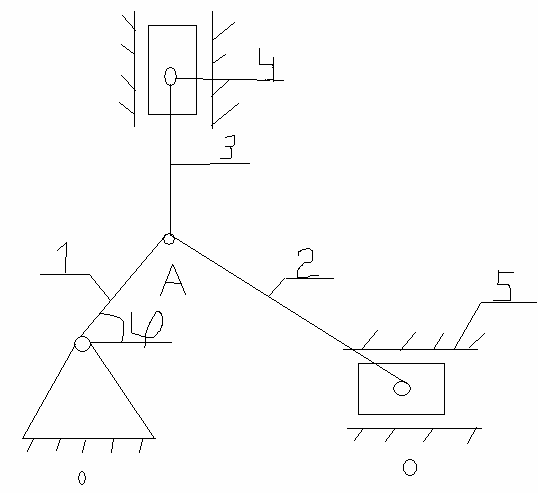 1=0
1=0
P2(0-1;1-3;3-2;2-5;5-0;3-4;4-0)
W=3n-2P2=3*5-2*7=1
Шарнир А наз-ся двухкратным. Пример 2
W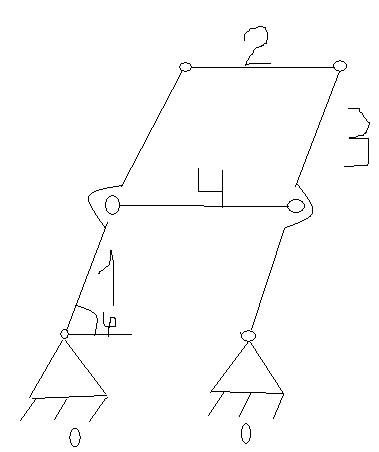 =3*5-2*6=0
=3*5-2*6=0
Искуственно наложенную связь дает звено для жесткости и такая связь наз-ся избыточной или пассивной, ее не учитывают при вычислении степени подвижности механизма.
W=3*3-2*4=1