

- •Автоматизация судов в вопросах и ответах предисловие
- •Какие основные понятия, характеризующие средства автоматизации, определены Правилами Регистра?
- •В каких случаях система апс должна подавать сигналы?
- •Какие уровни автоматизации определены Регистром?
- •Какой уровень автоматизации должен быть обеспечен на судах, в символ класса которых добавляется знак a2?
- •Какие требования предъявляются к автоматизации судов со знаком a1 в символе класса?
- •Какие устройства применяют для измерения давления до 0,2 мПа?
- •В каких случаях для измерения давления используют сильфоны?
- •Что представляют собой мембранные датчики давления с потенциометрическим преобразователем (потенциометром)?
- •Чем обусловлено широкое применение манометров?
- •Каковы характерные неисправности стрелочных манометров и как их устраняют?
- •Для чего предназначены реле давления рд-8т и рд-12?
- •Что представляет собой реле давления рдс-1т?
- •Что представляет собой дифманометр?
- •Как устроен датчик давления типа gt-1?
- •Как действуют пьезоэлектрические преобразователи?
- •Датчики и приборы для измерения расхода и состава среды к акой способ измерения расхода жидкости получил наибольшее распространение на судах?
- •Что представляет собой нормальная диафрагма?
- •Почему вместо нормальной диафрагмы иногда применяют нормальное сопло?
- •Почему применяют сопла или трубы Вентури?
- •Какие условия необходимо соблюдать при измерении перепада давлений?
- •Что представляют собой индуктивные датчики расхода?
- •Ч то собой представляют турбинные водосчетчики?
- •Для чего применяют датчики влажности и как они устроены?
- •Какова схема действия датчиков солесодержания?
- •Как можно определить содержание углекислого газа в дымовых газах с помощью датчиков?
- •Как определяется содержание о2?
- •Датчики и приборы для измерения температуры Где используют датчики температуры?
- •На каком свойстве основано действие биметаллических датчиков?
- •Из каких основных элементов состоит дилатометрический датчик (дилатометр)?
- •Какое устройство можно привести в качестве примера датчика температуры дилатометрического типа?
- •Как действует устройство тудэ?
- •Что представляют собой датчики манометрического типа?
- •Что представляют собой жидкостные датчики?
- •Что собой представляют парожидкостные измерители?
- •В каких случаях применяют разделительные сосуды в парожидкостных измерителях?
- •Какие наполнители используют в датчиках температуры?
- •Каковы особенности газового измерителя температуры?
- •Как используются измерители манометрического типа в термореле?
- •Каков диапазон настройки термореле?
- •Как устроен и действует манометрический термометр с электрическим выходом?
- •Термопары и термометры сопротивления Как действует термопара?
- •Какие термопары применяют на практике?
- •Что необходимо учитывать при выборе защитной арматуры?
- •Что необходимо сделать, чтобы температура свободных концов термопары поддерживалась постоянно?
- •Каковы параметры термопар?
- •Как устанавливают температурные датчики?
- •Как проверяют температурные датчики?
- •В чем состоит принцип работы преобразователей сопротивления, называемых терморезисторами?
- •К ак устроены терморезисторы?
- •На каком свойстве материалов основано действие термометров сопротивления?
- •Какие способы намотки применяют для терморезисторов сопротивлений?
- •В каких приборах используют термометры сопротивления?
- •Что собой представляет термометр сопротивления типа тсп-972?
- •Какие гидродинамические датчики частоты вращения применяют в судовой практике?
- •Ч то представляют собой тахогенераторы?
- •Что представляет собой аналого-цифровой преобразователь частоты вращения?
- •Как действует импульсный датчик с колебательным контуром?
- •Что представляет собой тахометр?
- •Что представляет собой механический тахометр типа тМи?
- •Что представляет собой тахометр типа к1803?
- •Для каких целей применяют счетчики частоты вращения, как они устроены?
- •Датчики для измерения усилий и крутящего момента Какие типы датчиков используются для измерения усилий, крутящего момента и мощности?
- •В чем заключается принцип действия фотоэлектрических датчиков?
- •Что представляют собой тензодатчики?
- •Какие тензорезисторы находят применение в настоящее время?
- •На чем основано действие датчиков крутящего момента и мощности?
- •Какие требования предъявляются к датчикам крутящего момента?
- •Как устанавливать тензодатчики на малой длине измерительного участка?
- •Как измерить крутящий момент на большой длине измерительного участка?
- •Как измерить крутящий момент при бесконтактном снятии сигналов?
- •Что представляет собой магнитно-эластичные датчики?
- •Как устроены индуктивные датчики крутящего момента?
- •Датчики для измерения перемещений Для чего применяют потенциометрические преобразователи?
- •Как действуют индуктивные датчики перемещения?
- •Как устроены трансформаторные преобразователи?
- •Как действуют дифференциальные трансформаторные датчики?
- •Датчики и приборы для измерения уровня жидкости в каких емкостях на судне необходимо контролировать уровень жидкости?
- •Какие датчики и приборы применяют для контроля за уровнем жидкости?
- •Какова область применения поплавковых датчиков уровня?
- •Как действуют мембранные датчики уровня, и каковы их особенности?
- •Как действуют мембранные датчики уровня с электрическим выходным сигналом?
- •Какие датчики уровня распространены на судах с автоматизированным управлением?
- •Что представляет собой реле уровня фирм «Мобрей» и «Беста»?
- •Какое назначение поплавкового реле типа cpm-2s?
- •Что представляет собой уровнемер атм?
- •Как действует индуктивный поплавковый датчик уровня?
- •Что представляет собой поплавковое реле пру-5м?
- •Какие характеристики полупроводниковых реле типа пру?
- •Как действует система индикации уровня сум-21?
- •Из каких компонентов состоит система сум-21?
- •Как используется свойство электропроводимости жидкости для измерения уровня?
- •Применяются ли емкостные датчики для измерения уровня?
- •Как действует схема измерения уровня, в которой используется свойство электропроводимости жидкости?
- •В каких условиях работает система?
- •Какие операции реализуются системой?
- •Какими основными техническими данными характеризуется система?
- •Система централизованного контроля алси Что представляет собой система алси-1?
- •Каково назначение основного канала сигнализации?
- •Как конструктивно выполнены основные каналы сигнализации?
- •Как работает канал при отсутствии неисправности?
- •Как работает схема при появлении неисправности?
- •Каковы особенности системы алси-8?
- •Как регистрируются выбеги параметров?
- •Что представляет собой пишущая машинка «Кинцле»?
- •Как осуществляется управление машинкой «Кинцле»?
- •Как происходит обегание контролируемых точек?
- •Какие неисправности могут быть в системе алси и как их устранить?
- •Система централизованного контроля км-1 Каковы технические возможности системы км-1?
- •К ак конструктивно выполнено сигнализационное контрольное устройство?
- •Какие рабочие параметры имеет система км-1?
- •Как осуществляется соединение платы с кассетой?
- •Как подключаются кассеты к системе км-1?
- •Для чего предназначен и как работает измерительный прибор типа кмв-1?.
- •Что представляет собой плата сигнализации помех типа кме-1?
- •Что представляет собой плата сигнализации отклонений от среднего значения температуры типа кмр-1/т2?
- •Каким образом группируются сигналы?
- •Какие особенности имеет система км-2?
- •Какие могут возникнуть неисправности в системе км и как их устранить?
- •Как контролируют каналовые платы для температуры выпускных газов?
- •Что представляет собой местное диагностирование?
- •Что представляет собой система типа dets настройки дизеля?
- •Какие параметры регистрируются системой dets?
- •Как производится индикация параметров?
- •Как производится юстировка угла поворота коленчатого вала?
- •Какие погрешности могут быть при измерении угла?
- •Как могут быть получены средние значения угла?
- •Из каких составляющих состоит юстировка угла?
- •Как производится автоматическая юстировка угла?
- •Как определить, что юстировка угла закончена?
- •Какие сведения необходимы для расчета удельного расхода топлива?
- •Выявление неисправностей дизеля на основе эталонных значений Как могут быть установлены эталонные значения?
- •Для каких целей производится оценка значений параметров?
- •Какие параметры влияют на давление в цилиндре?
- •Какие величины влияют на параметры впрыска?
- •Детектор масляного тумана «Виза трон» Для чего используется детектор масляного тумана?
- •Как работает детектор?
- •Как отбираются пробы, и контролируется концентрация масляного тумана?
- •Как действует схема детектора масляного тумана?
- •Как производится автоматическая регулировка чувствительности?
- •Как подключить детектор к двигателю?
- •Какова структура системы?
- •Какие возможны варианты построения системы?
- •В какой форме возможна связь «человек - машина»?
- •Какой набор дисплеев предусматривается в системе?
- •К ак выполняется кабельный монтаж между шкафами?
- •Какие компоненты включает система «Даматик»?
- •Что такое распределенная система, как она выполнена в системе «Даматик»?
- •Что представляют собой процессовые станции?
- •Какие задачи возложены на станции передачи сообщений?
- •Какие задачи возложены на процессовые станции?
- •Какие преимущества децентрализованной системы?
- •Надежность, диагностика, обслуживание системы «Даматик»
- •Какие неисправности выявляются системой диагностирования?
- •Какие технические решения повышают надежность системы «Даматик»?
- •Каким образом упрощено техническое обслуживание системы?
- •Ч то представляет собой клавиатура системы?
- •Что представляет собой система дисплеев?
- •Что представляют собой панели, которые устанавливают в цпу на мостике?
- •Что представляют собой панели, установленные в каюте механика и кают-компании?
- •Что представляет собой печатающее устройство для регистрации аварийных сигналов?
- •Какие операции необходимо выполнить для обеспечения работы печатающего устройства аварийных сигналов?
- •Применение микропроцессоров в регистраторе типа «ким» параметров судовых механизмов Из каких основных частей состоит система?
- •Что представляют собой блоки питания?
- •Как устроена передняя панель?
- •Что представляет собой центральный процессор?
- •Каковы основные конструктивные характеристики системы?
- •К аковы характеристики печатающего устройства «Китт 80»?
- •Какие каналы блокировки имеет регистратор?
- •Как действует регистратор системы
- •Для чего служат счетные каналы?
- •Как производится регистрация аварийных параметров?
- •Как осуществляется периодическая регистрация?
- •Что представляет собой тренд?
- •Каким образом регистрируются аварийные значения параметров?
- •Как производится отслеживание времени?
- •В каких случаях подается сигнализация о неисправности системы регистрации?
- •Какие функции выполняются системой регистрации?
- •Как выглядит распечатка о состоянии параметров?
- •Что представляют собой устройства контроля и управления системы?
- •Как производится установка даты и времени?
- •Какие операции выполняются при смене бумаги для печатающего устройства?
- •Какие неисправности могут привести к отказу источника питания, и каков порядок их выявления?
- •Какие неисправности могут быть у печатающего устройства, и какой порядок их выявления?
- •Какие могут быть неисправности в системе?
- •Какие могут быть неисправности часов и панели и каков порядок их выявления?
- •Как производится замена печатных плат?
- •Как производится замена источника питания?
- •Для чего предназначена система fahm-2-2?
- •Какие операции выполняются системой fahm-2-2?
- •Каковы основные технические характеристики системы?
- •Какие основные устройства включены в комплектацию системы fahm-2-2?
- •На базе, какого регулятора построена система fahm?
- •Как производится настройка системы?
- •Как осуществляется маневрирование судна?
- •Как осуществляется управление двигателем?
- •Как выключить систему из действия?
- •Какие операции необходимо выполнять при техническом обслуживании системы?
- •Какова последовательность работ при определении неисправностей в системе?
- •Как проверить реле системы?
- •Какие неисправности могут быть в системе подачи топлива и как их устранить?
- •Какие отклонения могут произойти в подаче топлива при пуске двигателя?
- •Каким образом можно устранить дефекты пусковой подачи топлива?
- •Система дау фирмы стл к акие виды управления обеспечивает система фирмы стл?
- •Как осуществляется ручное управление?
- •Как осуществляется автоматическое управление?
- •Какие приборы установлены на мостике?
- •Какие устройства установлены на панели системы?
- •Какие устройства установлены на двигателе?
- •Для чего предназначены датчики давления (прессостаты)?
- •Какие устройства установлены на пульте управления в цпу?
- •Какое оборудование установлено для принудительного реверсирования при ручном управлении?
- •Для каких функций предназначена панель автоматической защиты?
- •Как осуществляется индикация положения распределительного вала?
- •Для чего формируется сигнал неправильного направления вращения вала двигателя?
- •Какие профилактические мероприятия следует осуществлять в системе стл?
- •Какие работы выполняют ежедневно?
- •Какие работы выполняют ежемесячно?
- •Какие работы необходимо выполнять периодически?
- •В каких случаях команда может определить неисправность?
- •Электронная система «Зенит 23-21» Каково назначение системы?
- •Каков состав системы «Зенит 23-21»?
- •Как производится включение системы?
- •Как производится пуск двигателя?
- •Как осуществляется реверсирование двигателя?
- •Для чего предназначены основные узлы системы?
- •Какие условия необходимо соблюдать при эксплуатации системы?
- •Как производится подготовка системы к работе?
- •Какие программы управления обеспечивает система?
- •Какие операции необходимы для настройки электрической схемы управления?
- •Какие операции выполняют при настройке схемы защиты двигателя от перегрузок?
- •Как проверяют настройку схемы защиты?
- •Какие основные мероприятия должны быть выполнены при техническом обслуживании системы?
- •Какие характерные неисправности могут возникнуть в системе и как их устранить?
- •Из каких основных операций состоит управление электроэнергетической установкой?
- •Какой порядок включения резервных генераторных агрегатов?
- •Какие операции выполняются при пуске дизель-генератора?
- •Какие операции выполняются при остановке генераторного агрегата?
- •Что представляет собой дау дизель-генератора типа «Роса-м»?
- •Система автоматизации электростанции «Ижора-м» Каково назначение системы автоматизации «Ижора-м»?
- •Из каких блоков состоит система «Ижора-м»?
- •Какие задачи решает система «Ижора-м»?
- •При каких нагрузках система «Ижора-м» обеспечивает пуск резервного дизельного дизель-генератора?
- •Какие преимущества имеет система «Ижора-м» по сравнению с другими системами типа «Ижора»?
- •Как производится остановка электроэнергетической установки?
- •Как осуществляется проверка резервного дизель-генератора?
- •Какой порядок включения и выключения резервных дезель-генераторов?
- •В каких случаях может быть изменен порядок работы дизель-генераторов?
- •Как осуществляются переходы рабочих режимов дизель-генератора и валогенератора?
- •Какие состояния являются объектами контроля и что при этом индицируется?
- •Какие операции выполняются при синхронизации?
- •Какие уставки возможны для системы синхронизации?
- •Что входит в состав синхронизатора?
- •Какие меры необходимо принимать при обнаружении неисправности в блоке синхронизатора?
- •Какие явления происходят при переходе с режима дизель-генератора на режим валогенератора?
- •Какие системы автоматического регулирования напряжения различают по способу регулирования (сарн)?
- •Каковы особенности распределения нагрузки в бесщеточных синхронных генераторах?
- •Какова трудоемкость обслуживания бесщеточного синхронного генератора?
- •К ак работает бесщеточный синхронный генератор?
- •Каковы преимущества бесщеточного синхронного генератора?
- •Как производится настройка регулятора?
- •К аковы особенности электрической схемы регулятора?
- •Из каких частей состоит регулятор типа smux2/?!?
- •Каковы рабочие характеристики регулятора типа smx2/?!?
- •Как регулируется падение реактивного напряжения?
- •Как производится уставка напряжения статора?
- •Как выполняется защита регулятора?
- •Как выбрать регулятор типа smuy?
- •Каковы характеристики регулятора напряжения типа smui?
- •Ч то может произойти при коротком замыкании главной цепи?
- •Как осуществляется монтаж регулятора?
- •Как работает схема регулятора напряжения?
- •Как производится ввод в действие регулятора?
- •Как работает двигатель при пониженной частоте вращения?
- •Как производится снятие напряжения в сети?
- •Как произвести пуск генератора с помощью внешнего источника?
- •Как осуществляется параллельная работа генераторов?
- •Как устанавливается режим параллельной работы генераторов?
- •Как выровнять нагрузки генераторов?
- •Какие мероприятия необходимо выполнять при техническом обслуживании регулятора типа smui?
- •Какие неисправности могут быть у регулятора напряжения типа smui и как их устранить?
- •Устройство электронных регуляторов частоты вращения Какие применяются регуляторы частоты вращения?
- •Почему необходимы электронные регуляторы?
- •Какие недостатки имеют гидравлические регуляторы?
- •Каково устройство силовых приводов электронных регуляторов?
- •Что включает в себя электронная система регулирования скорости главных судовых дизелей?
- •Как устроены и работают исполнительные органы в электронных регуляторах?
- •Какие датчики частоты вращения используют в системе?
- •Как обрабатывается сигнал по частоте вращения?
- •Как обрабатывается сигнал по топливоподаче?
- •К ак действует датчик частоты вращения?
- •Как осуществляется задание частоты вращения?
- •Функции, выполняемые регулятором частоты вращения в системе управления двигателем Как осуществляется регулирование двигателя?
- •Как осуществляется остановка двигателя?
- •Как производится ограничение крутящего момента?
- •Как осуществляется ограничение дымления?
- •Как осуществляется параллельная работа двигателя?
- •Что представляет собой сервосистема топливоподачи?
- •Какие неисправности отслеживает система?
- •Как можно осуществить быстрое и точное задание топливоподачи?
- •От чего зависит выбор места установки датчика частоты?
- •Как должен обрабатываться полученный сигнал?
- •Можно ли изменить постоянную времени системы регулирования?
- •Каковы значения временных характеристик электронного регулятора?
- •Техническое обслуживание регуляторов частоты вращения Согласно какому нормативному документу выполняются техническое обслуживание и настройка регуляторов частоты вращения?
- •Какие операции выполняются при техническом обслуживании регуляторов?
- •Какова периодичность выполнения работ технического обслуживания?
- •Какие мероприятия должны быть выполнены при проведении профилактических осмотров?
- •Что выявляется при проведении осмотров?
- •В какой последовательности производят промывание и смену масла в регуляторе?
- •Как производится проверка срабатывания механизма защиты?
- •На каких режимах дизеля производится проверка динамических характеристик регулятора?
- •В чем заключается проверка динамических характеристик регуляторов?
- •Настройка механизма задания частоты вращения и механизма ограничения нагрузки дизеля Какие механизмы задания частоты вращения используются в регуляторах?
- •Как осуществляют настройку механизма ограничения хода сервомотора?
- •Как настраивают механизм ограничения нагрузки дизеля?
- •Какой запас хода должен иметь сервомотор?
- •Как согласовать ход сервомотора с ходом рейки топливных насосов?
- •Каковы особенности процессов регулирования температуры?
- •Какие системы охлаждения применяют на морских судах?
- •Почему технико-экономические показатели работы двигателя зависят от температурного режима системы охлаждения?
- •Какие значения температуры поддерживаются в системах охлаждения двигателей?
- •Терморегуляторы и требования, предъявляемые к ним По каким признакам можно классифицировать терморегуляторы, применяемые в судовых условиях?
- •На какие группы можно разделить регуляторы непрямого действия?
- •Какие требования предъявляются к системам автоматического регулирования температуры и терморегуляторам?
- •Каким основным требованиям должна отвечать конструкция регуляторов?
- •Система охлаждения судового дизеля как объект регулирования температуры Какие системы охлаждения имеют судовые дизели?
- •Что представляет собой принципиальная схема системы охлаждения двигателей?
- •Какие методы применяют для регулирования температуры охлаждающей среды?
- •Какие способы применяют для регулирования температуры воды на входе в двигатель?
- •В чем заключается способ перепуска во внутреннем контуре?
- •Как осуществляется способ дросселирования?
- •Каким образом осуществляется способ обвода?
- •В чем заключается способ перепуска в контуре забортной воды?
- •Что является общим в разных способах регулирования?
- •Регулирование температуры масла Какие бывают ошибки при подключении регуляторов температуры масла?
- •Статические характеристики систем автоматического регулирования температуры Что такое статическая характеристика сарт?
- •Что называют зоной неравномерности регулирования?
- •Что представляет собой общая статическая характеристика сарт?
- •От чего зависят статические свойства сарт?
- •Что представляют собой статические характеристики сарт?
- •Какие зависимости отражают реальную неравномерность сарт?
- •Какие параметры влияют на температуру стенки цилиндра?
- •Регуляторы температуры прямого действия Как устроены регуляторы фирмы ако?
- •Как настроить регулятор ако?
- •К ак устроены и работают регуляторы температуры фирмы «Валтэн» с твердым наполнителем измерителя?
- •Каковы особенности монтажа регулятора?
- •В каких случаях рекомендуется применять регуляторы фирмы «Валтэн»?
- •Какие операции должны быть выполнены при техническом обслуживании регуляторов «Валтэн»?
- •Регуляторы температуры непрямого действия Каково устройство регулятора типа ртнд-м?
- •Каковы основные характеристики регуляторов типа ртнд-м?
- •Что представляет собой регулирующий орган?
- •Как работает регулятор?
- •Как производят настройку регулятора?
- •Что представляют собой регуляторы фирмы «Плайгер»?
- •Как устроен регулирующий орган?
- •Как устроен позиционер?
- •Каково устройство измерителя?
- •Каким образом взаимодействуют измеритель, позиционер и регулирующий орган?
- •Как производится настройка регулятора?
- •Каков состав ксу «Залив-м»?
- •Каковы преимущества комплекса «Залив-м»?
- •Система управления вспомогательными механизмами Каково назначение системы «Прибой-1-03»?
- •Каковы основные технические данные системы?
- •Как обеспечивается питание системы?
- •Каково назначение каналов, входящих в систему «Прибой-1-03»?
- •Как устроен щит управления и сигнализации?
- •На какие группы разбиты параметры в системе «Прибой-2»?
- •Автоматизированные системы подготовки топлива Какие сепараторы могут быть автоматизированы?
- •Какие операции автоматизируются при сепарировании нефтепродуктов?
- •Для каких целей применяют систему управления «Рикорда»?
- •Что представляют собой системы автоматизации сепараторов фирмы «Титан»?
- •Как устроен и работает регулятор выдержки времени?
- •Что представляет собой принципиальная схема системы сепарации?
- •Как устанавливают выдержку времени?
- •Как производят установку времени программного датчика (таймера)?
- •Как производят наладку сепараторов типа марх 204, 205, 210, 313?
- •Как проверить работу системы управления?
- •Как осуществляется пуск одного или нескольких сепараторов?
- •Что представляет собой водоприемник?
- •Для чего предназначено устройство mapxi?
- •К ак регулируется поток жидкости к сепаратору?
Как устроены индуктивные датчики крутящего момента?
В индуктивных датчиках изменение сопротивления катушек в зависимости от угла скручивания является выходным сигналом прибора.
На рис.39 показана схема такого устройства. Вместе с валом 1 вращаются закрепленные на нем магнитопроводы 2,5,6. Индуктивные катушки 4 уложены в неподвижном сердечнике 3. Если вал не испытывает скручивания, то индуктивности L1 и L2 катушек, питающиеся переменным током, одинаковы. При передаче валом 1 крутящего момента зазоры между магнитопроводами 6 и 2 с одной стороны и магнитопроводами 6 и 5 — с другой становятся неодинаковыми, вследствие чего появляется разность индуктивностей L1-L2, что и является выходным сигналом.
Датчики для измерения перемещений Для чего применяют потенциометрические преобразователи?
Потенциометрические
преобразователи служат для преобразования
углового или линейного перемещений в
электрический сигнал. Наиболее часто
применяют проволочные Потенциометрические
преобразователи с непрерывной намоткой.
Преобразователь (рис.40,а)
имеет каркас 1,
выполненный из листового изоляционного
материала. На каркас в один слой
наматывается изолированный провод 5
из высокоомного материала. По очищенной
от и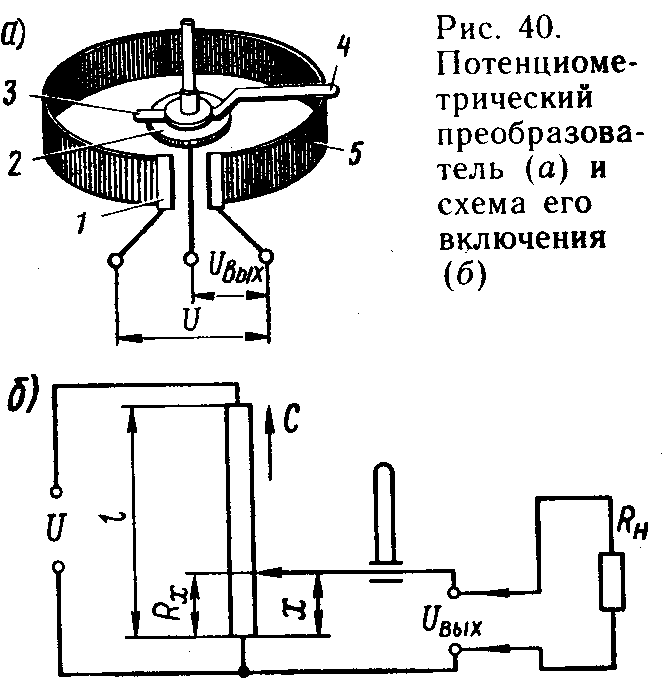 золяции
контактной дорожке обмотки перемещается
движок 4, выполненный в виде упругой
пластины или нескольких проволочек
различной длины, сложенных вместе.
Движок соединен щеткой 3
с токосъемным кольцом 2.
золяции
контактной дорожке обмотки перемещается
движок 4, выполненный в виде упругой
пластины или нескольких проволочек
различной длины, сложенных вместе.
Движок соединен щеткой 3
с токосъемным кольцом 2.
На рис.40,6 показана схема простейшего преобразователя. Входной величиной преобразователя является линейное или угловое перемещение движка относительно начала обмотки потенциометра.
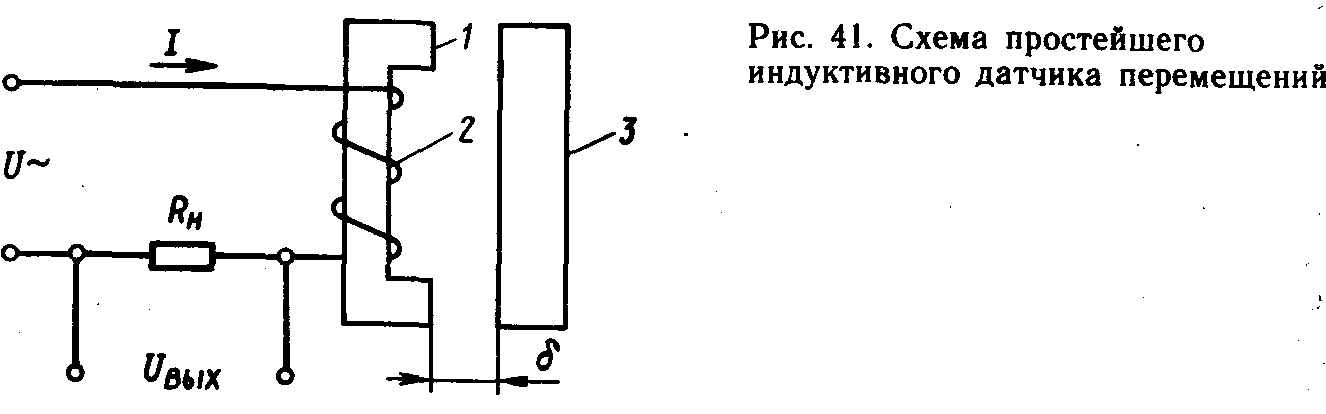
Как действуют индуктивные датчики перемещения?
М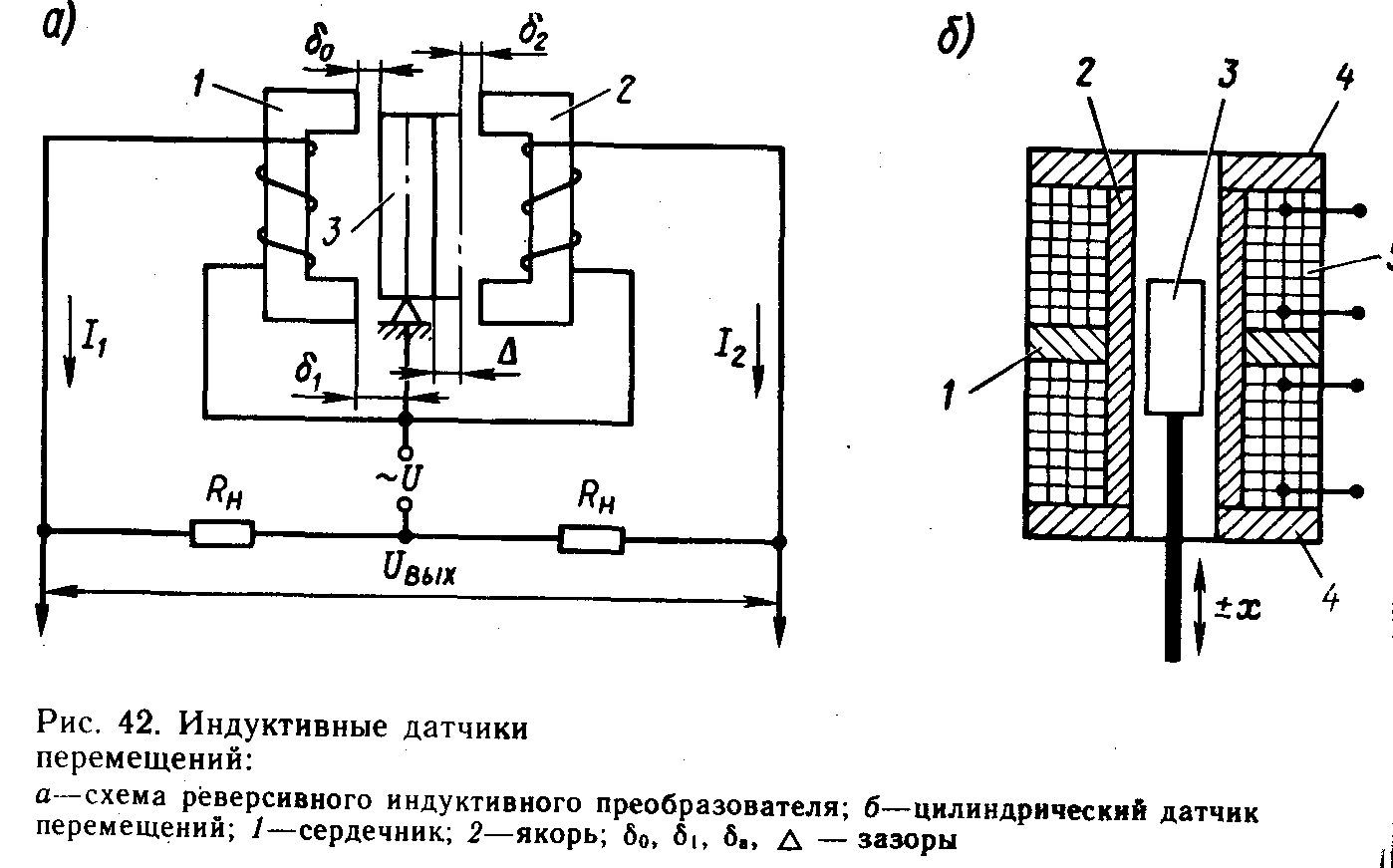 агнитный
поток катушки проходит через железный
сердечник 1,
сердечник 3
и воздушный зазор 6.
При перемещении сердечника изменяется
воздушный зазор 6,
а следовательно, и самоиндукция L
катушки 2
(рис.41). Преимущество индуктивных
датчиков — они не изнашиваются и имеют
большую чувствительность. Основной
недостаток — пропорциональная зависимость
между изменением индуктивности ΔL
и перемещением Δδ
сохраняется только в определенных
небольших пределах. В большинстве
случаев применяют два индуктивных
датчика с одним общим якорем. Датчики
включены в мостовую цепь таким образом,
что при увеличении самоиндукции одного
датчика самоиндукция другого уменьшается
(рис.42,а).
Для измерения больших перемещений
применяют цилиндрические реверсивные
индуктивные преобразователи (рис.42,б).
Магнитопровод преобразователя 2
изготовлен в виде цилиндрической трубки,
которая вместе с двумя крышками 4
является ярмом. Якорь 3
имеет цилиндрическую форму. Диск 1
из ферромагнитного материала предназначен
для увеличения магнитной проводимости.
По обе стороны от диска установлены две
цилиндрические катушки 5.
агнитный
поток катушки проходит через железный
сердечник 1,
сердечник 3
и воздушный зазор 6.
При перемещении сердечника изменяется
воздушный зазор 6,
а следовательно, и самоиндукция L
катушки 2
(рис.41). Преимущество индуктивных
датчиков — они не изнашиваются и имеют
большую чувствительность. Основной
недостаток — пропорциональная зависимость
между изменением индуктивности ΔL
и перемещением Δδ
сохраняется только в определенных
небольших пределах. В большинстве
случаев применяют два индуктивных
датчика с одним общим якорем. Датчики
включены в мостовую цепь таким образом,
что при увеличении самоиндукции одного
датчика самоиндукция другого уменьшается
(рис.42,а).
Для измерения больших перемещений
применяют цилиндрические реверсивные
индуктивные преобразователи (рис.42,б).
Магнитопровод преобразователя 2
изготовлен в виде цилиндрической трубки,
которая вместе с двумя крышками 4
является ярмом. Якорь 3
имеет цилиндрическую форму. Диск 1
из ферромагнитного материала предназначен
для увеличения магнитной проводимости.
По обе стороны от диска установлены две
цилиндрические катушки 5.
Как устроены трансформаторные преобразователи?
Цилиндрический дифференциально-трансформаторный преобразователь (рис.43) имеет три обмотки — первичную Wn и две вторичные W1=W2=Su, которые установлены на общем изоляционном каркасе 1.
Первичная обмотка, состоящая из двух последовательно включенных обмоток, уложена по всей длине преобразователя. Вторичные обмотки расположены одна в верхней, а другая в нижней части преобразователя и соединены между собой последовательно встречно. Такое расположение обмоток обеспечивает более равномерное распределение электромагнитного поля. Преобразователь имеет якорь 2 и магнитопровод 3 из листовой электротехнической стали. Обе детали имеют цилиндрическую форму.
В нейтральном положении якоря магнитные потоки, пронизывающие вторичные обмотки, равны. При этом выходное напряжение равно нулю. Перемещение якоря приводит к изменению магнитных потоков и наведению во вторичных обмотках трансформаторных ЭДС, не равных друг другу, а следовательно, к появлению выходного напряжения. С изменением направления перемещения якоря меняется фаза выходного напряжения на 180°.