

3.2 Качество оценок и критерии оптимальности измерения параметров.
Наличие помех приводит к отличию точечной оценки * от истинного значения параметра . При этом показателем качества является статистически усредненное значение ошибки измерения ε=*-. Если приняты меры по исключению грубых промахов и систематических ошибок, то ошибки измерения сводятся только к случайным.
Математическое ожидание ошибки
![]() =М[α*-
α]позволяет определить
наличие или отсутствие систематической
ошибки. Если
=0,
т.е.
=М[α*-
α]позволяет определить
наличие или отсутствие систематической
ошибки. Если
=0,
т.е.
![]() ,
оценка называется несмещенной, что
свидетельствует об отсутствии
систематической ошибки. При
,
оценка называется несмещенной, что
свидетельствует об отсутствии
систематической ошибки. При![]() ,
т.е.
,
т.е.![]() ,
оценка называется смещенной, что является
результатом действия не устраненной
систематической ошибки. Если при
неограниченном числе измерений (n→∞)
оценка α* стремится к α, то такая оценка
называется состоятельной.
,
оценка называется смещенной, что является
результатом действия не устраненной
систематической ошибки. Если при
неограниченном числе измерений (n→∞)
оценка α* стремится к α, то такая оценка
называется состоятельной.
Показателями качества измерения являются:
Среднеквадратичная ошибка:
ε2скв=![]() ,
,
где p(ε) – одномерная плотность распределения ε.
Вероятная (средняя) ошибка εвер, соответствующая такому значению ε= εвер, которое делит площадь под кривой p(ε) пополам,
p(ε)
P(│ε│≤ εвер)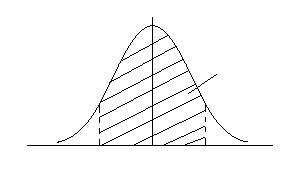
P(│ε│≤ εвер)= P(│ε│≥ εвер)=0,5
Максимальная ошибка εмах – такая, вероятность превышения которой по модулю меньше 0,8%. Интервал 2εмах называется доверительным интервалом.
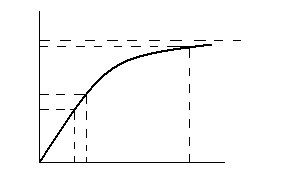
В случае центрированного гауссовского закона распределения случайных ошибок однозначно связаны соотношениями
εвер≈![]() εскв;
εмах=
εскв;
εмах=![]() εскв≈4εвер
εскв≈4εвер
1
0,992
0,67
εвер
ε
εскв
0,5
εмах
Дисперсия ошибки Dε=M[(
 )]=
)]= .
.
В случае несмещенной оценки
![]() и Dε=
и Dε=![]() =ε2cкв.
Желательно, чтобы дисперсия оценки была
как можно меньше. Оценка, имеющая
наименьшую дисперсию из всех возможных
оценок, называется эффективной.
=ε2cкв.
Желательно, чтобы дисперсия оценки была
как можно меньше. Оценка, имеющая
наименьшую дисперсию из всех возможных
оценок, называется эффективной.
По аналогии с теорией статистических решений в задачах обнаружения в качестве фундаментального критерия измерения может быть принят средний риск ошибки измерения:
![]() (3.1)
(3.1)
где p(α, α*)
– совместная плотность вероятности
значения оценки α* и
истинного значения α,
т.е. p(α,
α*)dαdα* -
элемент вероятности произвольной
ситуации соответствия α
* и α; r(α,
α*) – функция стоимости
ошибки для ситуации (α,
α*). Оптимизация выбора
оценки α* сводится, как и
в теории обнаружения, к минимизации
среднего риска
![]() .
.
Минимизация связана с перебором большого числа ситуаций (α, α*). Чтобы уменьшить это число, сопоставление α и α* производят при одном из двух упрощающих предположений: измеряемая величина α считается не случайной; измеряемая величина α случайна, но известна плотность вероятностей ее значений p(α).
Первый подход соответствует классической теории оценивания, при которой не требуется знания функций распределения. Задача сводится к введению критерия несмещенности оценки , т.е. устраняется систематическая ошибка без оценки случайной или функциональной ошибки (метод наименьших квадратов).
В системах локации, в том числе в системах … неразрушающего контроля и медицинской диагностики, предпочтение отдается второму подходу - байесовской теории оценок, которая позволяет по доопытному – априорному распределению p(α) и выбранной функции стоимости ошибки r(α,α*) создать единообразную методику оптимизации оценок.