2.2.7. Регулировочные механизмы и устройства
Исходя из возможностей использования одного и того же станка или установки для решения различных боевых задач, в них предусматриваются различные регулировочные механизмы и устройства, позволяющие производить следить следующие виды регулировки:
1) Регулировка под закрытие.
Эта регулировка заключается в изменении высоты оси канала оружия при различной высоте закрытия и может быть произведена:
а) разворотом ног (германский станок – салазки);
б) разворотом и выдвижением ног (в большинстве треножных станков),
в) выдвижением вертлюга посредством реечной передачи (японский станок Арисака),
регулировка бывает как плавная, так и ступенчатая.
2) Регулировка по целям различного характера.
Эта регулировка производится в универсальных станках и установках и заключается в переходе из положения для стрельбы по наземным целям в положение для стрельбы по зенитным целям и наоборот.
3) Регулировка под наводчика.
Эта регулировка заключается в изменении положения элементов, обеспечивающих удобство работы наводчика (сиденья, подножки, подлокотника и т.п.).
2.2.8. Уравновешивающие механизмы
2.2.8.1. Уравновешивание момента силы тяжести качающейся части
Качающаяся часть установки считается уравновешенной, если ее ось качания проходит через центр тяжести или настолько близко от него (некоторый перевес качающейся части назад в системах с подъемными механизмами обычно даже вводится для постоянного выбора зазоров в одну сторону), что некоторая неуравновешенность практически мало ощущается и не затрудняет вертикальную наводку. В случаях больших смещений оси качания от центра тяжести качающаяся часть является неуравновешенной.
Наиболее часто встречаются два случая неуравновешенности качающейся части:
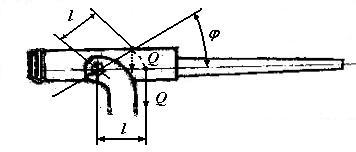
1) В ряде установок (например, в зенитных, универсальных и авиационных) для удобства управления оружием при больших углах возвышения приходится ось качения относить назад (от центра тяжести в сторону затыльника) (рисунок 2.7).
Момент неуравновешенности:
![]() , (2.4)
, (2.4)
![]() -
вес качающейся части;
-
вес качающейся части;
![]() -
расстояние межу осью качания и центром
тяжести качающейся части;
-
расстояние межу осью качания и центром
тяжести качающейся части;
![]() -
угол возвышения.
-
угол возвышения.
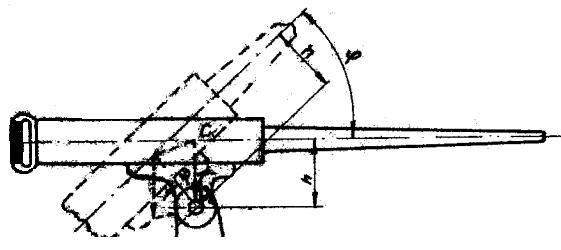
2) В некоторых случаях ось качания смещается выше или ниже центра тяжести (некоторые элементы установки могут мешать совмещению этих осей) (рисунок 2.8).
Момент неуравновешенности:
![]() , (2.5)
, (2.5)
![]() -
расстояние между осью качания и центром
тяжести качающейся части.
-
расстояние между осью качания и центром
тяжести качающейся части.
Для уравновешивания момента силы тяжести качающейся части применяются уравновешивающие механизмы, называемыми компенсаторами. Наиболее часто применяются пружинные компенсаторы с винтовыми или спиральными пружинами. В артиллерии применяются и гидропневматические компенсаторы.
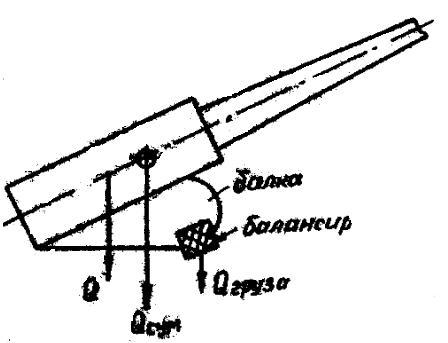
Иногда для уравновешивания качающейся части применяют балансиры – дополнительные грузы, с помощью которых центр тяжести качающейся части выводится на ось качания. Их редко применение объясняется необходимостью увеличения веса установки (рисунок 2.9).
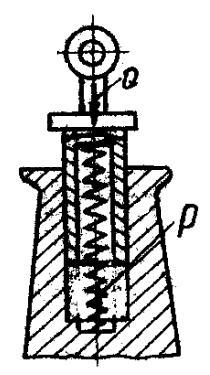
2.2.8.2. Уравновешивание силы тяжести подъемной части (рисунок 2.10)
Встречаются случаи, когда приходится уравновешивать не момент сил тяжести, а сами силы тяжести, например, в комплексных системах с выдвижным вертлюгом, где приходится поднимать и опускать большую массу.
Для уравновешивания силы тяжести подъемной части применяются уравновешивающие механизмы, называемые противовесами. Наиболее часто противовесы выполняются в виде винтовой пружины с расчетом на полную уравновешенность в некотором среднем, наиболее ходовом положении подъемной части. При этом, чем меньше жесткость пружины, тем меньше неуравновешенность при одном и том же отклонении подъемной части от уравновешенного положения.
Иногда применяется уравновешивание подъемных частей весом наводчика или дополнительным грузом через систему блоков.
|
|
|
Рисунок 2.7. Первый случай неуравновешенности качающейся части. |
|
|
|
Рисунок 2.8. Второй случай неуравновешенности качающейся части. |
|
|
|
Рисунок 2.9. Уравновешивание качающейся части с помощью балансира. |
|
|
|
Рисунок 2.10. Уравновешивание силы тяжести подъемной части. |