

Угол между прямой и плоскостью
Пусть
заданы плоскость
![]() и прямаяl
и прямаяl
![]() .
Найдем угол между ними. Угол между прямой
и плоскостью совпадает со смежным углом
к углу образованным направляющим
вектором
.
Найдем угол между ними. Угол между прямой
и плоскостью совпадает со смежным углом
к углу образованным направляющим
вектором![]() прямой и нормальным вектором плоскости
прямой и нормальным вектором плоскости![]() (рис.V.10).
Так как
(рис.V.10).
Так как
![]() ,
то
,
то
![]() .
(V.16)
.
(V.16)

Рис. V.10
Угол между плоскостями
Пусть
даны две плоскости
![]() :
:![]() и
и
![]() :
:![]() .
Найдем угол между этими плоскостями,
который совпадает с углом между их
нормальными векторами
.
Найдем угол между этими плоскостями,
который совпадает с углом между их
нормальными векторами![]() и
и![]() .
.
Учитывая, что
![]() ,
,
получим
![]() .
(V.17)
.
(V.17)
Пример
V.17.
Даны координаты вершин пирамиды
![]() ,
,![]() ,
,![]() ,
,![]() .
Найти: 1) длины реберАВ
и AC;
2) угол между ребрами АВ
и АС;
3) площадь грани АВС;
4) объем пирамиды ABCD;
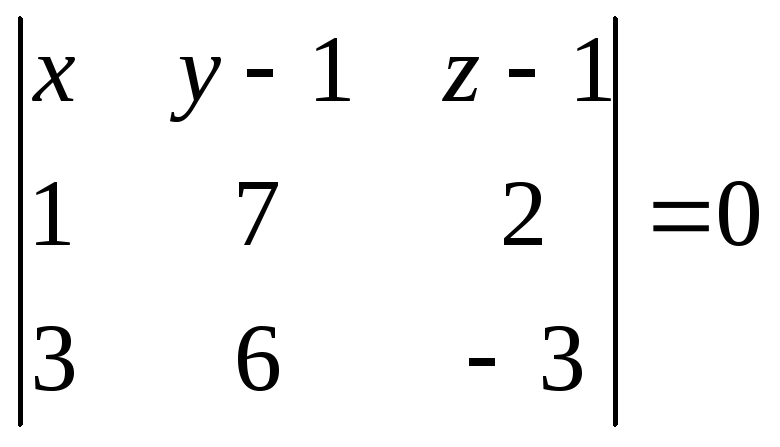
5) уравнение прямой АВ;
6) уравнение плоскости АВС;
7) уравнение высоты пирамиды, опущенной
на грань АВС.
Сделать чертеж.
.
Найти: 1) длины реберАВ
и AC;
2) угол между ребрами АВ
и АС;
3) площадь грани АВС;
4) объем пирамиды ABCD;
5) уравнение прямой АВ;
6) уравнение плоскости АВС;
7) уравнение высоты пирамиды, опущенной
на грань АВС.
Сделать чертеж.
Решение.
Длина ребра AB совпадает с длиной вектора
 ,
поэтому определим координаты векторов
,
поэтому определим координаты векторов и
и .
.
![]() ,
,
![]() .
.
Длина вектора равна корню квадратному из суммы квадратов его координат, то есть
![]() ,
,
![]() .
.
Угол между ребрами AB и AC совпадает с углом между векторами
 и
и ,
который можно определить по формуле
,
который можно определить по формуле
![]() ,
,
![]() .
.
Грань ABC представляет собой треугольник, его площадь найдем через векторное произведение:
![]() ,
,
так как

![]() .
.
Объем пирамиды вычислим по формуле:

![]() .
.
Здесь
![]() .
.
Уравнение прямой, проходящей через точки А, В, имеет вид:
![]() ,
то есть,
,
то есть,
![]() .
.
Уравнение плоскости ABC определим из равенства
 ,
,
 или
или
![]() .
.
Так как высота – это прямая перпендикулярная плоскости ABC, ее направляющим вектором будет вектор-нормаль
 плоскостиABC,
тогда уравнение высоты имеет вид:
плоскостиABC,
тогда уравнение высоты имеет вид:
![]() .
.
Выполним чертеж (рис. V.11).

Рис. V.11
VI. Линейные операторы § 1. Линейный оператор
В линейной алгебре, помимо векторных пространств, фундаментальное значение имеют линейные операторы (или линейные преобразования) 1, 7, 11.
Как общее понятие, оператор – отображение одного множества на другое, каждое из которых наделено некоторой структурой (системой аксиом, отношением порядка, алгебраической операцией и т.д.). Аналогом оператора в математическом анализе является функция.
Современное определение линейного оператора A принадлежит Дж. Пеано для векторных пространств с основным полем R действительных чисел, с областью определения и областью значений в L.
Отметим, что при использовании современной вычислительной техники (кластеров, вычислительных систем, нейронных систем) эффективность параллельных программ существенно повышается, если представленные для решения задачи записаны в векторной (операторной) форме.
Поскольку
линейный оператор рассматривается как
отображение
![]() ,
,![]() или как функция
или как функция![]() ,
то в дальнейшем, векторы будем обозначать
малыми буквамиx,
y,
…, возможно с индексами,
,
то в дальнейшем, векторы будем обозначать
малыми буквамиx,
y,
…, возможно с индексами,
![]() .
.
Определение. Линейным оператором A на векторном пространстве L называется линейное преобразование одного вектора в другой из того же пространства, так что выполняются свойства линейности
![]() ,
,
![]() ,
(VI.1)
,
(VI.1)
что эквивалентно линейной комбинации,
![]() ,
,
![]() .
(VI.2)
.
(VI.2)
Из (VI.1) следует, что среди линейных операторов существуют:
а)
нулевой,
![]() ,
то есть такой, что
,
то есть такой, что![]() ,
,![]() ,
где
0 – нулевой вектор;
,
где
0 – нулевой вектор;
б)
единичный (тождественный)
![]() ,
то есть такой, что
,
то есть такой, что![]() ;
;
в)
подобия ,
то есть такой, что
![]()
![]() ,
,
отсюда
следует, что при
![]() получаем нулевой оператор, а при
получаем нулевой оператор, а при![]() тождественный.
тождественный.
Из
(VI.2)
следует, что
![]() ,
где
,
где![]() ,
,![]() .
Область значений
.
Область значений![]() оператораA
является подпространством, в частности
множество векторов
оператораA
является подпространством, в частности
множество векторов
![]() ,
таких что
,
таких что![]() – подпространство.
– подпространство.
Множество
![]() называетсяядром
оператора A,
а размерность ядра называется дефектом
оператора A.
называетсяядром
оператора A,
а размерность ядра называется дефектом
оператора A.
Пример VI.1. Пусть в векторном пространстве L задан базис. Оператор A ставит в соответствие каждому вектору x его координату с фиксированным номером. Доказать, что A – линейный оператор.
Доказательство.
Пусть
![]() ,
,![]() ,
тогда, например,
,
тогда, например,![]() ,
,![]() ,
покажем, что
,
покажем, что
![]() ,
,
![]() .
.
В самом деле, имеем из (VI.2),
![]() .
▼
.
▼