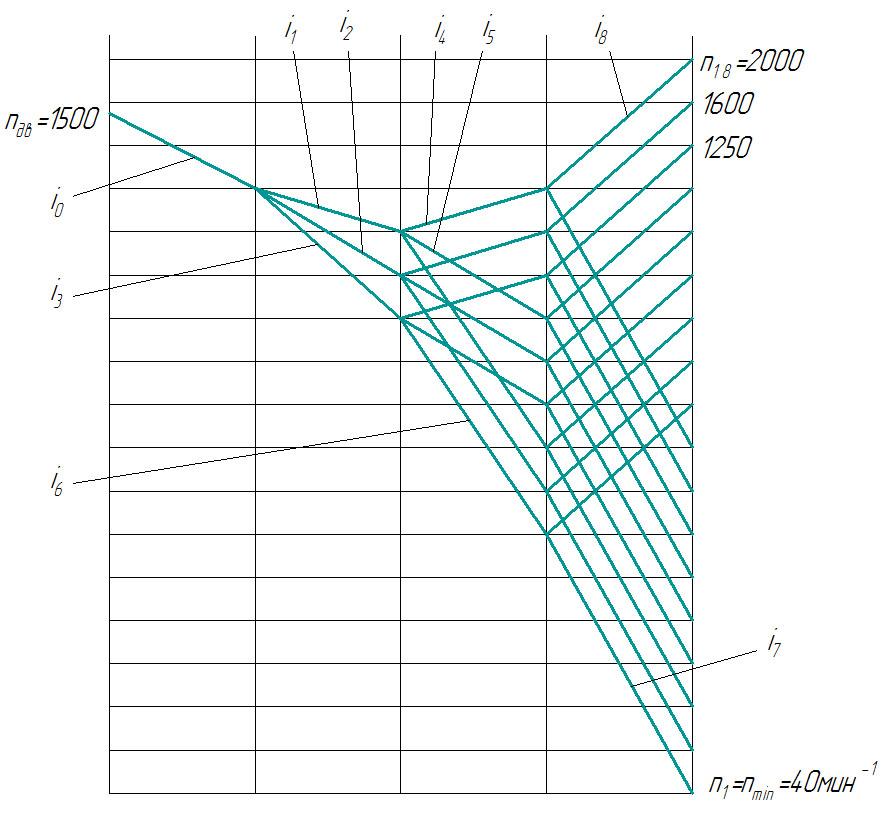
15.Построение графика частот вращения.
Последовательность построения графика частот:
проводим столько вертикальных линий, сколько валов имеет привод, включая вал электродвигателя;
проводим на равных расстояниях столько горизонтальных линий, сколько ступеней частот вращения охватывает диапазон регулирования;
строим нижнюю ветвь графика – т.н. линию наименьших передаточных отношений. При этом учитывают табл. ограничений на число пересекаемых интервалов отрезком изображающим передачу.
i\ φ
1,06
1,12
1,26
1,41
1,58
1,78
2,0
imin≥ 1/4
24
12
6
4
3
2
2
imax≤ 2
12
6
3
2
2
1
1
дальнейшие построения ведутся в соответствии со структурной сеткой для каждой группы. Расстояния между концами отрезков также равны характеристике.
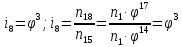
по графику частот вращения определяем передаточное отношение по формуле:

где знак «+» берется в том случае, если передача направлена вверх, знак «-» если вниз;
S – число интервалов, которые пересекают отрезок изображающий передачу.




16 Кс с приводом от многоскоростных э/двиг.
В многоскоростном э/приводе применяется э/двиг. постоянного тока с терристорным управлением или с шунтом, а так же асинхронным э/двиг. (2-ух и 3-х скоростные) и питаются от 3-х фазного переменного тока.
Применение регулируемого э/двиг. целесообразно, если удорожание э/привода компенсируется снижением стоимости коробки.
Из регулируемых двигателей 3-х фазного переменного тока в основном применяются 2-ух скоростные. При этом первый вал коробки может получать две частоты вращения. Число механизмов ступеней уменьшается вдвое. ZК=Z/2
Кроме упрощения механической части привода появляется возможность переключения частот вращения без остановки шпинделя (на ходу).
2-ух скоростной э/двиг. условно можно рассматривать, как электрическую группу, состоящую из 2-ух передач.
ХЭможет быть найдена из след. соображений:
Частота вращения шпинделя при переключении э/двиг. с меньшей на большую частоту, увеличивается вдвое.То можно записать выражение для определения знаменателя геометрического ряда электрической группы: φЭ=φХэ=2.
ХЭ*lgφ=lg2
ХЭ=lg2/lgφ
φ-знаменатель ряда частоты вращения шпинделя. Для стандартных значений φ, ХЭравняется:
|
φ |
1,12 |
1,26 |
1,41 |
2 |
1,06 |
|
ХЭ |
6 |
3 |
2 |
1 |
12 |
Электрическая группа может быть основной только при φ=2 (редко встречается). Обычно 2-ух скоростные э/двиг. встраиваются в привода с φ=1,06 1,12 1,26 1,41.
Построить структурную сетку и график частот вращения привода: Z=24,
nmin=125 мин-1,nmax=1800 мин-1. В приводе применить 2-ух скоростной э/двиг.
1) определяем диапозон регулирования привода
D=1800/125=14,4
2) находим знаменатель ряда частот вращения шпинделя

3) вычисляется ХЭ: ХЭ=lg2/lg1.12=6
4) выбираем структурную формулу привода Z=ZЭ*ZК24=2*12
ZЭ=2ZК=6
5) структурная формула
Z= 2*3*2*2Z=3*2*2*3
для обычной коробки
6) строим структурную сетку: 1 группа- электрическая. Частоты вращения э/двиг. обозначаются А и В.
IХ=1 IIХ=3 IIIХ=12 IV
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|

























Строим график частот вращения. Горизонтальных линий 24. Вертикальных-5. Выбираем предельное передаточное отношение 1/4<i<2.
I` I II III IV
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
















Выполняем анализ полученного графика частот вращения, выявляем слабые места, вносим коррекцию и изображаем улучшенный график.
Оптимизация
I` I II III IV
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|