

9.Приводы мрс. Требования, предъявляемые к приводам .
Приводами МС называют совокупность двигателей и передач обеспечивающих движения исполнительного органа станка. В зависимости от вида двигателя и вида передач к исполнительному органу различают: электрический, гидравлический, механический, пневматический и комбинированный привод.
В соответствии с назначением приводы делятся.
1.Привод гл. движения;
2.Привод подач
3.Привод установочных перемещений
4.Привод холл. Ходов
5. Др. приводы(поворот стола,револьверной головки,барабанов)
6. Приводы мех-ов переключения частот вращения и управление.
Требовавания.
1. Возможность изменение частоты вращения или скорости прямолинеиного движения в пределах заданного диапазона.
2. Возможность изменение напрвления движения.
3. Передачу требуемой мощности в пределах всего или части диапазона.
4. Получениеmaxзаданного усилия на режущем инструменте
5. Плавность движения и отсуствие вибраций при работе под нагрузкой.
6. Сохранность постоянства настроенных частот вращения или скорости движения независимо от нагрузки.
10.Привод главного движения станков с руч и с чпу.Бесступ. Рег-ие
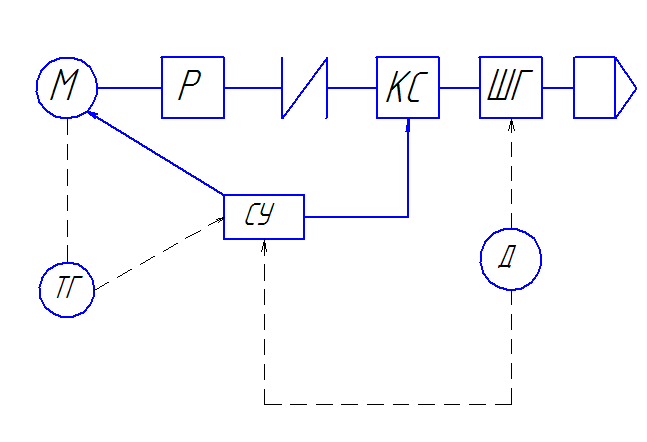
М – двигатель; Р – редуктор; КС – коробкаскоростей; ШГ – шпиндельнаягруппа; СУ – система управления; Д – датчик скоростных перемещений; ТГ – Тахо – генератор
В зависимости от сочетания различных видов движения и механических передач привод главного движения обеспечивает ступенчатое и бесступенчатое изменение частоты вращения. Бесступенчатое изменение может быть получено с помощью электропривода, гидропривода или с помощью механической передачи(вариатор). Ступенчатое изменение частоты вращения может быть получено при помощи механической передачи, коробки скоростей или с помощью электропривода. При компоновке шпиндельной группы привод главного движения может быть:раздельным и нераздельным.
Нераздельный привод выполняется в виде комплекса КС И ШУ, помещенных в 1 корпус. Такая конструкция компактна, однако имеет ряд недостатков:
-передача колебаний непосредственно на шпиндель;
-температурные деформации.
Раздельный привод лишен таких недостатков, т.к выходной вал коробки скоростей связан со шпинделем посредством клиноременной передачи, которая существенно демпфирует колебания.
11.Ряды частот вращения шпинделя при ступенчатом регулировании скорости. Рекомендации по выбору передаточных отношений.
При ступенчатом регулирований от минимальной чатстоты вращения до мах необходимо обеспечить ряд промежуточных значений .
В КС (коробка скоростей) наиболее целесообразно применять геометрический ряд частот вращения. Это впервые было доказано в 1876 российским академиком А.В.Гадовиным.
Расположение частот вращения по геметрическому ряду даёт возможность сократить постоянный переход скорости и обеспечить работу станка в равноценных эксплуатацоинных условиях на всех участках диапазона частот.
Рассмотрим основные зависимости:
1) Геометричекий ряд:




2) Диапазон регулирования:

3) Знаменатель ряда частот

4) Чисто ступеней частот вращения

z – число ступений частот вращения.
С помощью геометрического ряда можно спроектировать сложные коробки скоростей состоящие из элементарных двухфазовых передач.
Знаменатели геометрического ряда:
1.06; 1.12; 1.26; 1.41; 1.58; 1.78; 2.0 .
1.06 – имеет вспомогательное значение.
1.12–при проектирование автоматов и тяжелых станков, когда требуется точная настройка на заданные режимы резания .
1.26 ,1.41 –при проектирование универсальных станков (сверлильных, фрезерных, токарных).
1.58,1.78- при проектирование станоков настройка которых не требует высокой точности.
2.0- имеет вспомогательное значение.
Рекомендации
Для коробок скоростей(КС) 1/4≤ i ≤ 2
Для коробок подач (КП) 1/5 ≤ i ≤ 2,8
При отклонении от рекомендуемых знач. i необходимо обосновать.