

2.3. Методы регистрации единичных элементов.
Прием сигналов, поступающих с выхода канала непрерывного времени (канала постоянного тока), заключается в определении и фиксации значащих позиций единичных элементов. Эта процедура в соответствии с /7/ называется регистрацией. Реализация оптимальных устройств регистрации вызывает серьезные технические трудности. Поэтому на практике применяют субоптимальные (близкие к оптимальным) методы регистрации, которые проигрывают оптимальным в помехоустойчивости, однако проще в реализации. Рассмотрим наиболее распространенные методы.
2.3.1. Регистрация методом стробирования
Сущность метода заключается в том, что сигнал на выходе КПТ, в виде импульса постоянного тока, анализируется (стробируется) в середине единичного интервала отсчетом малой длительности min 0 . Результат анализа сравнивается с пороговым значением Uпор и в результате сравнения принимается решение о значащей позиции единичного элемента. Целесообразность выбора стробирующего отсчета в середине единичного элемента обусловлена тем, что эта область единичного элемента в меньшей степени подвержена краевым искажениям. Обозначим uвх(t) – сигнал на входе устройства регистрации. Тогда сигнал на выходе этого устройства
uвых(t)
=
![]() uвх(t)
(t
– tр)dt,
(2.12)
uвх(t)
(t
– tр)dt,
(2.12)
где (.) – дельта функция; tр – момент регистрации, р 0.
На основании фильтрующего свойства - функции получим:
uвых(t) = uвх(tр) (2.13)
Алгоритм регистрации методом стробирования можно представить следующим образом:
(2.14)
Из (2.14) следует, что если значение единичного элемента в момент регистрации uвх(tр) больше порогового значения uпор , то принимается решение о регистрации символа “1” , в противном случае регистрируется символ “0”.
Рассмотрим один из возможных путей технической реализации регистрации стробированием. Структурная схема устройства приведена на рис.2.10, а соответствующие временные диаграммы – на рис.2.11.
Р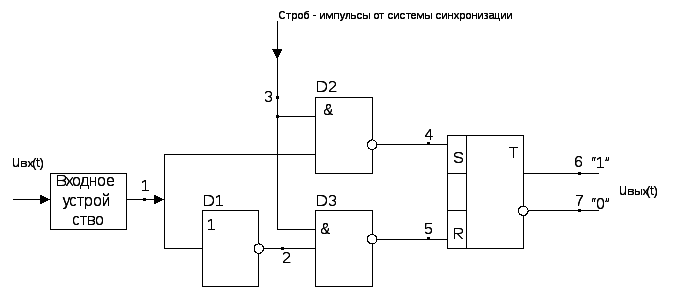 ис.2.10.
Структурная схема регистрации
стробированием
ис.2.10.
Структурная схема регистрации
стробированием
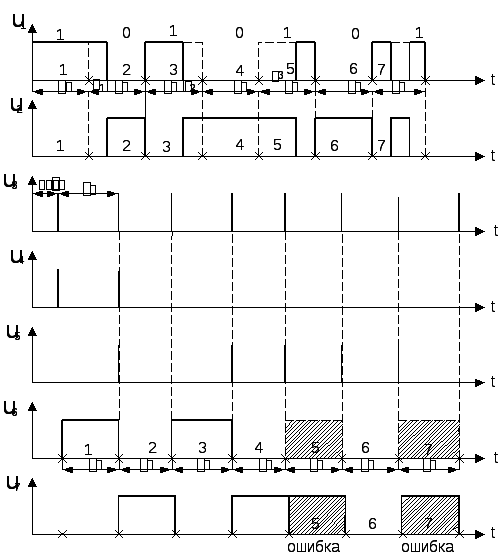
Рис.2.11. Временные диаграммы работы устройства регистрации стробированием
Логические элементы D1 – D3 предназначены для определения значащих позиций единичных элементов, а триггер D4 – для восстановления единичного интервала 0. Регистрация значений единичных элементов строго в середине 0 обеспечивается системой тактовой синхронизации.
Из временных диаграмм следует, что передается последовательность 1010101. На выходе входного устройства импульсы постоянного тока u1 имеют прямоугольную форму, но искажены по длительности (штриховой линией показаны неискаженные сигналы и идеальные значащие моменты ИЗМ). В зависимости от значащей позиции импульсов сигнала u 1 срабатывает тот или иной логический элемент D2 или D3 и в триггер D4 записывается соответствующее значение единичного элемента с задержкой во времени приблизительно 0,50. Если смещение значащих моментов ЗМ относительно ИЗМ не превышает 0,50, то элементы сигнала регистрируются правильно. Максимальная величина смещения ЗМ относительно ИЗМ, не приводящее к неправильной регистрации, определяет важный параметр, называемый теоретической исправляющей способностью по краевым искажениям. Этот параметр определяется отношением максимального смещения ЗМ относительно ИЗМ max, не приводящим к неправильной регистрации, к величине единичного интервала 0:
μкр
=
![]() %(2.15)
%(2.15)
Для регистрации стробированием:
μдр
=
![]() %
= 50%
%
= 50%
Из рис2.11 видно, что вследствие смещения ЗМ относительно ИЗМ на величину
3 > 0,5, пятый элемент принимается с ошибкой.
Регистрация стробированием не обеспечивает защиты от дроблений. Поскольку появление дроблений равновероятно на интервале 0, часть из них совпадает с моментами регистрации и вызывает ошибки в принятых и зарегистрированных комбинациях. Поэтому считается, что исправляющая способность по дроблениям метода стробирования μдр = 0.
На рис.2.11 показано, что вследствие дроблений для практической оценки качества приема вводится понятие эффективной исправляющей способности μэф, измеряемой в условиях эксплуатации. По сравнению с теоретической исправляющей способностью μт величина μэф учитывает погрешность работы распределителя распр и погрешность системы фазирования фаз. Эти погрешности вызывают некоторый сдвиг моментов регистрации по отношению к их оптимальному положению. Поэтому:
μэф = μт - распр - фаз (2.16)
Определенные погрешности вносятся также входными и выходными устройствами оконечных устройств.
Номинальная исправляющая способность μн представляет собой минимальное значение величины μэф, полученное для группы однотипных аппаратов в нормальных условиях их эксплуатации. Она показывает, какую исправляющую способность можно получить для любого произвольно выбранного аппарата.