

2.3.2. Интегральный метод регистрации
Алгоритм интегрального метода регистрации выглядит следующим образом:
![]() uвых(t)
=
uвых(t)
=
![]() uвх(t)dt
uвх(t)dt , (2.17)
, (2.17)
Где uвх(t) – сигнал на входе регистрирующего устройства. Интегрирование осуществляется на интервале, соответствующем длительности неискаженного единичного элемента.
Реализация интегрального метода может быть осуществлена средствами аналоговой или цифровой техники. В [2] имеются сведения об аналоговых вариантах, а в [1] предлагается вариант цифровой реализации. В последнем случае непрерывное интегрирование заменяется суммированием N отсчетов входного сигнала. Структурная схема, поясняющая принцип действия такого устройства регистрации, приведена на рис.2.12, а соответствующие временные диаграммы показаны на рис.2.13.

Р![]() ис.2.12.
Структурная схема устройства регистрации
интегральным методом
ис.2.12.
Структурная схема устройства регистрации
интегральным методом
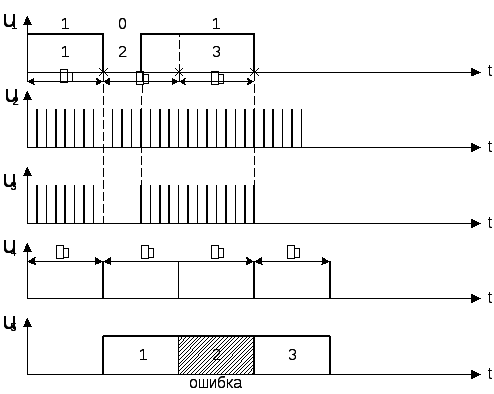
Рис.2.13. Временные диаграммы работы устройства регистрации интегральным методом
Передается последовательность 101. Импульсы постоянного тока u1 имеют прямоугольную форму, но искажены по длительности (штриховой линией показаны неискаженные сигналы и ИЗМ). Сигнал u1(t) управляет ключом , который открывается при u1(t) = 1. При этом стробимпульсы u2(t) с частотой следования fт >> 1/0 заполняют счетчик. Пусть за время действия неискаженной токовой посылки 0 в счетчик записывается N импульсов u2. Если при наличии краевых искажений и дроблений за время 0 в счетчик поступит N/2 +1 и более стробимпульсов, то согласно (2.17) принимается решение, что принят символ “1”. Заметим, что емкость счетчика достаточно взять равной N/2 +1. В конце единичного интервала, определяемого тактовыми импульсами u4, показания счетчика считываются, и он обнуляется. На временных диаграммах неправильно регистрируется вторая посылка, так как вместо символа “0” регистрируется символ “1”.
Оценим исправляющую способность интегрального метода. Рассмотрим наиболее неблагоприятный случай двусторонних краевых искажений, направленных к середине единичного элемента и причем будем считать, что смещение ЗМ относительно ИЗМ слева и справа одинаковы и не превышают допустимого значения:
л = пр = д (2.18)
Запишем условие правильной регистрации при наличии краевых искажений
л + пр = 0,50 (2.19)
2д = 0,50
и д = 0,250
Следовательно, исправляющая способность по краевым искажениям интегрального метода регистрации
μкр = 25%.
При оценке исправляющей способности интегрального метода по дроблениям учтем, что неправильная регистрация отсутствует, если суммарная длительность дроблений при отсутствии краевых искажений не превышает 0,50 . Поэтому
μдр = 50%.
2.3.3. Комбинированный метод регистрации
Сущность метода заключается в том, что каждый единичный элемент анализируется по нескольким отсчетам. Из теории сигналов [8] известно соотношение для оптимального числа отсчетов N:
N = 0/кор,
где 0 – единичный интервал, а кор – интервал корреляции помехи.
Таким образом, для каждого вида помех существует определенное оптимальное число отсчетов на единичном интервале. На практике выбирается нечетное число отсчетов N = 3 9.
Структурная схема устройства, реализующего комбинированный метод, аналогична устройству с регистрацией интегрированием. Метод занимает промежуточное положение между методом стробированием (N = 1) и интегральным методом (N ∞).
Исправляющая способность комбинированного метода регистрации зависит от числа отсчетов N. Допустимая величина смещения ЗМ относительно ИЗМ, не приводящая к неправильной регистрации
![]() д
=
д
=
![]()
![]() (2.20)
(2.20)
где![]() - ближайшее целое число a.
- ближайшее целое число a.
Следовательно, исправляющая способность по краевым искажениям
μкр
=
![]() (2.21)
(2.21)
Эта величина максимальна при N = 5, при этом μкр = 30%. При N ∞ μкр 25% как у интегрального метода.
Допустимая длительность дроблений на интервале 0, не приводящая к неправильной регистрации
др
=
![]() (2.22)
(2.22)
Отсюда исправляющая способность по дроблениям
μдр
=
![]() (2.23)
(2.23)
Для метода стробированием N = 1 μдр = 0, что совпадает с ранее полученным результатом. С увеличением числа отсчетов N исправляющая способность по дроблениям μдр 50%, что характерно для интегрального метода. В частности, при N = 3, μдр = 33%, а при N = 5
μдр = 40%.