

3.4.3. Сопряжение стартстопных оу с синхронными дк (метод скользящего индекса)
Данный метод используется для снижения частоты дискретизации fд (импульсной несущей).
Суть метода состоит в том, что в ДК передаются сведения не только о характере значащей позиции е.э. (переход от «0» к «1»), но и также сведения о том, в каком месте между импульсами стробирования это произошло.
Для этого расстояние между стробирующими импульсами с чачтотой fд (обозначим его, как и прежде, Δt) разбивается на Кз зон. Каждой зоне присваивается двоичный код. Например, если взять 4 зоны, то
1 Зоне – 00
2 Зоне – 01
3 Зоне – 10
4 Зоне – 11
В синхронный ДК передают 3 вида сигналов :
1) некоторый стартовый сигнал А, который указывает характер изменения значащей позиции передаваемого е.э.. Например, при переходе от «0» к «1» - стартовый сигнал «1»; при переходе от «1» к «0» - стартовый сигнал «0».
2) код зоны – сигнал В
3) сигналы подтверждения С, которые по значащей позиции совпадают со стартовыми сигналами А. Сигналы подтверждения передаются вплоть до следующей смены значащей позиции е.э. передаваемой от источника последовательности.
Поясним сказанное на временной диаграмме (рис. 3.4):
1 2
3 4 1 2 3 4 Сi
А В1В2С1С2А В1В2С1 А В 3
зоне В 3 зоне t Сигнал
в ПРМ t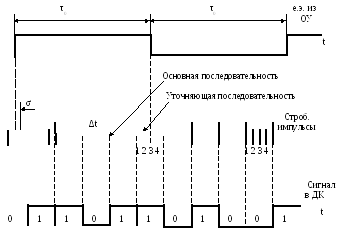

































Рис. 3.4. Временные диаграммы метода СИП
(скользящего индекса с подтверждением)
На временной диаграмме (рис.3.4) выбрано 4 зоны. Таким образом, е.э. передаётся группой сигналов А,Вi и Ci .
Величина краевого искажения за счёт ошибки дискретизации в данном случае равна:
![]() (3.16)
(3.16)
В общем случае число зон Кз, которое определяется уточняющей последовательностью, может быть произвольно.
Чем больше число зон Кз, тем меньше степень краевых искажений σ. Однако в реальных системах число зон увязывается с длиной КК, передаваемой в канал.
Если длина КК, которая передается в ДК, равна n, тогда:
![]() (3.17)
(3.17)
(«-1» потому, что стартовый сигнал А передавать необходимо, а сигналы подтверждения С мы не учитываем)
Поэтому:
![]() (3.18)
(3.18)
А частота дискретизации (основной последовательности):
![]() (3.19)
(3.19)
Сравнивая частоты дискретизации для МН (3.13) и СИП (3.19 ), можно заключить, что частота дискретизации для СИП в 2n-1 раз меньше, чем при МН (методе наложения) при заданных краевых искажениях.
Рассмотрим, каким образом можно выбрать число уточняющих зон – Кз.
Из временной диаграммы (рис.3.4) видно, что основное условие, при котором возможна работа методом СИП:
![]() (3.20)
(3.20)
Поскольку τ0 = 1/В и Δ = 1/fд, то, учитывая (3.19) , получим условие для определения Кз:
![]()
(3.21)
Используя формулу (3.21), можно определить допустимую длину КК (n) при заданной величине краевых искажений, а поскольку Кз = 2n-1, то можно определить Кзон.
В многоканальных системах с временным разделением и методом СИП при N каналах формула (3.19) принимает вид:
![]() (3.22)
(3.22)
Область применения метода СИП значительно шире, чем МН (метода наложения), поскольку в данном случае полоса пропускания используется более эффективно.