

Кафедра геометрии, СГУ, Мех-мат. Новиков В.Е.
Глава 2. Аналитический метод изучения фигур
1. Системы координат
Аналитический метод решения задач геометрии иногда называют методом координат, суть его состоит в некотором взаимно однозначном переходе от точек изучаемого пространства к их координатам и обратно. На этом пути сначала вспомним, что является линейным пространством.
Определение 1. Алгебраическая система на множестве V, с внутренней бинарной операцией (сложение) и внешней операцией (умножение на элементы некоторого поля k) называется линейным пространством V над k, если для этих операций выполняются свойства:
9.a + b = b + a (коммутативность сложения);
10.a +( b + c ) = ( a + b )+ c (ассоциативность сложения);
11.a + 0 = 0 + a = a (существование нуля);
12.a + (– a ) = (– a ) + a = 0 (существование противоположного элемента);
13.( a ) = ( ) a (ассоциативность умножения на скаляры);
14.( + ) a = a + a (дистрибутивность сложения скаляров относительно умножения);
15.( a + b ) = a + b (дистрибутивность сложения векторов относительно умножения);
16.1 a = a .
Где a , b , c , 0 ,(– a ) V; , ,1 k. При этом элементы базисного множества V линейного пространства часто называют векторами, а элементы поля k — скалярами.
ПРИМЕРЫ. 1. Пространство Vect(i), i=1, 2, 3, векторов на прямой, на плоскости, в пространстве.
2. kn = {(a1, a2, …, an) | ai k, 1 i n} — координатное линейное пространство над произ-
вольным полем k. Операции: если k, a, b kn, т.е. a = (a1, a2, …, an), b = (b1, b2, …, bn), то a + b := (a1 + b1, a2 + b2 , …, an + bn),
a := ( a1, a2, …, an).
В частности само поле k = k1 является линейным пространством над самим собой.
3. Пространство M(R,R) всех вещественных функций на числовой прямой с естественными операциями сложения и умножения на число:
Если f(x), g(x) M(R,R), R, то (f + g)(x) := f(x) + g(x),
( f)(x) := (f(x)), для всех x R.
4. Пространство C(R,R) всех непрерывных вещественных функций на R. Это следует из того, что сумма непрерывных функций и произведение непрерывной функции на число являются непрерывными функциями. А также пространство C([0,1],R) всех непрерывных вещественных
функций на [0,1]. Ясно, что C(R,R) C([0,1],R).
5.По аналогичной причине линейным вещественным пространством является множество D(R,R) всех дифференцируемых вещественных функций на R.
6.Линейными вещественными пространствами являются множество P(R) всех многочленов от одной вещественной переменной x с вещественными коэффициентами и его подмножество
Pn(R), состоящее из всех многочленной степени n.
Ясно, что имеют место включения: Pn(R) P(R) D(R,R) C(R,R) M(R,R). Определение 2. Пусть V — вещественное линейное пространство. Отображение вида :
V V R, обозначаемое ( a , b ):= ( a , b ), называется скалярным произведением на простран-
стве V, если оно удовлетворяет следующим свойствам:
1)( a , a ) 0, причем ( a , a ) = 0 тогда и только тогда, когда a = 0 (положительная оп-
ределенность);
2)( a , b ) = ( b , a ) (симметричность);
3)( a + b , c ) = ( a , c ) + ( b , c ) (аддитивность по первому аргументу);
14

Кафедра геометрии, СГУ, Мех-мат. Новиков В.Е.
4) ( a , b ) = ( a , b ) (однородность по первому аргументу).
ЗАМЕЧАНИЕ. Свойства 3) и 4) называют линейностью по первому аргументу скалярного произведения. Оно означает, что скалярное произведение от линейной комбинации равно линейной комбинации скалярных произведений с теми же коэффициентами соответственно. Учитывая свойство 2) легко показать, что скалярное произведение линейно и по второму аргументу. Такие функции называют билинейными. Таким образом, скалярное произведение –
это положительно определенный симметрический билинейный функционал : V V R.
Например: 1. ( a , b ) := | a || b |cos ab — скалярное произведение, определяемое на основании метрики, имеющейся на прямой, на плоскости и в пространстве (Vect(i), i = 1, 2, 3).
2. (a, b) := a1b1 + a2b2 + … + anbn — пример скалярного произведения в n-мерном арифметическом пространстве kn = {(a1, a2, …, an) | ai k, 1 i n}.
1
3. (f, g) := f (t)g(t)dt — скалярное произведение в пространстве C([0,1],R).
0
4. (a, b) := a1b1 + a2b2 + … + aibi + … — скалярное произведение в гильбертовом пространстве l2. Элементами этого пространства являются бесконечные последовательности вещественных
|
|
|
чисел |
a = (a1, a2, …, ai, …), удовлетворяющие условию ai2 |
.Сложение и умножение на |
|
i 1 |
|
числа в этом пространстве определяются покоординатно, как в Rn.
Определение 3. Вещественное линейное пространство V с заданным на нем скалярным произведением называется евклидовым пространством.
Однако, для построения геометрии недостаточно только линейного пространства, т.е. пространства векторов, необходимо ввести еще одно множество однотипных объектов — это множество точек. В силу чего имеем следующее определение.
Определение 4. Аффинным (или точечно-аффинным) пространством над векторным про-
странством V называется множество A, элементы которого называются точками, вместе с ото-
бражением A A V, сопоставляющим любым двум точкам A, B A, некоторый вектор AB V (векторсначаломвA иконцомB) иудовлетворяющимследующимаксиомам:
1)Для любой точки A A и любого вектора a V существует единственная точка B A,
такая, что AB = a (аксиома откладывания вектора);
2)Для любых точек A, B, C A : AB + BC = AC (аксиома суммы).
При этом линейное пространство V называется ассоциированным с аффинным пространством A или линеалом пространства A. Его размерность dimV называется размерностью аффинного пространства и обозначается dim A.
Аффинное пространство над евклидовым пространством называется точечно-
евклидовым или просто евклидовым.
Например: 1. Прямая, плоскость и пространство являются аффинными пространствами над векторными пространствами Vect(1), Vect(2), Vect(3) соответственно.
2. Всякое векторное пространство V превращается в аффинное пространство над самим собой,
если мы определим отображение V V V, следующимобразом: ab = a – b.
Определение 5. Пусть в аффинном пространстве A над V зафиксирована точка O, которую будемназыватьначаломилиполюсом.
1. Векторная система координат с данным полюсом O — это взаимно однозначное отображение : A V, которое ставит в соответствие каждой точке M ее радиус-вектор, т.е. вектор
OM , определяемый началом в точке O и концом в точке M .
2. Пусть дополнительно зафиксирован базис e= (ei ) пространства V. В этом случае говорят, что
задан репер Oe. Аффинная система координат с данным полюсом O и базисом e ставит в соответствие каждой точке M координатную строку (столбец) радиус-вектора данной точки относительно выбранных полюса и базиса. Координаты радиус-вектора точки M в базисе e называются аффинными координатами точки M относительно репера Oe. Данную аффинную
15
Кафедра геометрии, СГУ, Мех-мат. Новиков В.Е.
систему координат будем обозначать также Oe.
3. Аффинная система координат в евклидовом пространстве с ортонормированным базисом называется декартовой или прямоугольной.
В общем случае всякое взаимно однозначное отображение : A K в координатное множество K называется системой координат на аффинном пространстве A. Если pr1( ) A
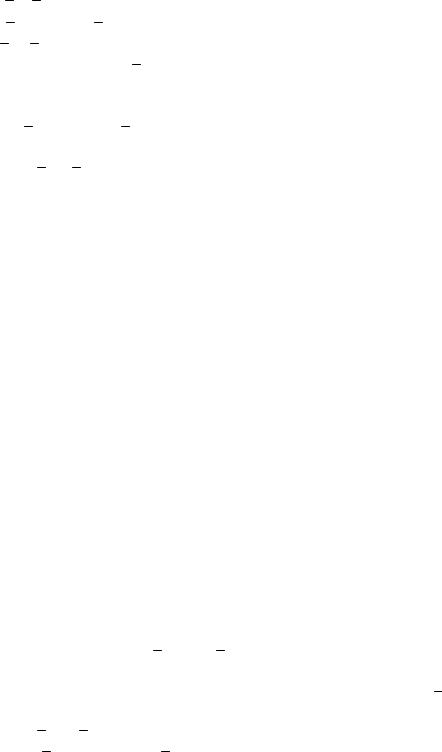
(pr1( ) A), то система называется частичной. Если pr1( ) = A, то система координат называется полной. Например, векторная система координат является полной. Полярная система координат с полярным полюсом O и полярной осью l (см. рис. 1) на плоскости ставит в соответствие каждой точке M : 1) расстояние r (полярный радиус) от точки M до начала O; 2) угол
наклона (полярный угол) радиус-вектора точки M к полярной оси l, относительно выбранно-
го направления e . Таким образом, точка M имеет координаты (r, ). Полярная система коор- |
||||||||||||||||||||||||||||||
|
M |
|
|
|
|
|
динат является частичной, так как координаты точки O |
|||||||||||||||||||||||
|
|
|
|
|
|
не определены. |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
r |
|
|
|
|
|
ТЕОРЕМА 2.1 (Преобразование аффинной систе- |
|||||||||||||||||||||||
|
|
|
e |
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
мы координат). Пусть в аффинном пространстве A даны |
|||||||||||||||||||||||||
l |
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
две системы координат Oe и O΄u. Пусть Qe |
|
— матрица |
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
Рис. 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
u |
|
|
|||
|
|
|
|
|
перехода от базиса e к базису u, т.е. |
u= e Qe |
. Тогда ко- |
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
u |
|
|
|
ординаты точки P A в этих системах связаны формулой |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
PeT = Qe |
|
|
PuT + OeT , |
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
u |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
где |
PeT , OeT |
— координатные столбцы точек P и O΄ в системе Oe, PuT — координатный |
||||||||||||||||||||||||||||
столбец точки P в системе O΄u. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T |
|
|
|
|
|
T |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
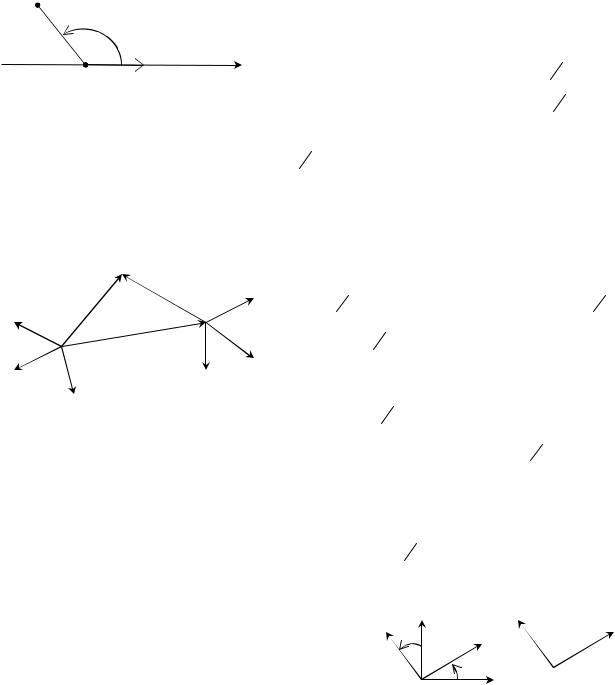
Доказательство. По рис. 2: |
OP OO |
|
|
|
|
|
По |
условиям |
|
|
|
, |
|
|
|
|||||||||||||||
|
|
O P . |
OP = e Pe |
|
OO |
= e Oe , |
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T |
|
T |
|
T |
|
T |
|
|
|
|
|
||||
|
|
|
|
P |
|
|
|
|
|
|
|
|
|
|
|
. Подставим |
||||||||||||||
|
|
|
|
|
|
O P = u Pu , |
т.е. e Pe = |
e Oe + |
u Pu |
|||||||||||||||||||||
|
|
|
|
|
|
un |
u = e Qe |
|
, |
получим |
|
e PeT = e OeT + e Qe |
PuT = |
|||||||||||||||||
|
e1 |
|
|
|
O΄ |
…. |
|
|
|
|
|
|
|
|
|
u |
|
|
|
|
|
|
|
|
|
|
|
u |
||
|
|
|
|
|
|
|
|
|
|
|
T |
+ Qe |
|
T |
|
|
|
|
|
|
|
|
|
|
||||||
|
O |
|
|
|
|
|
|
= e( Oe |
|
Pu ). В силу единственности разло- |
||||||||||||||||||||
e2 |
|
|
|
|
u1 |
u2 |
|
|
|
|
|
|
|
|
|
|
|
u |
|
|
|
|
|
|
|
|
|
|
|
|
…. |
|
|
|
жения вектора по базисным векторам последнее |
||||||||||||||||||||||||||
|
|
en |
|
|
|
|
равенство можно сократить слева на e, получим |
|||||||||||||||||||||||
|
|
|
|
Рис. 2 |
|
|
|
PeT = OeT + Qe u |
PuT . Наконец, |
учитывая коммута- |
||||||||||||||||||||
|
|
|
|
|
|
|
|
тивность сложения матриц PeT = Qe |
PuT + OeT . |
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
u |
|
|
|
|
|
Например:
1. Формулы преобразования аффинных координат точки в пространстве:
x e11 x e12 y e31 z x0y e12 x e22 y e32 z y0z e13 x e23 y e33 z z0
x |
x |
|
|
|
1 |
1 |
|||
|
|
e1 |
e2 |
||||||
, где PeT = y , |
PuT = y , |
Qe |
|
= e12 |
e22 |
||||
|
|
|
|
|
u |
|
3 |
e |
3 |
z |
z |
|
|
e |
|
2 |
|||
|
|
|
|
|
|
1 |
|
||
e13 e32 ,
e3
3
x0 |
|
OeT = y0 |
. |
|
|
z0 |
|
2. Формулы поворота и переноса полюса декартовой системы координат на плоскости (см. рис. 3) :
x cos x sin y x0 .
y sin x cos y y0
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
j |
|
|
|
j |
||||||
j |
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|||
|
i |
|
|
|
|
i |
|||||||
|
|
|
|
|
|
|
|
||||||
|
|
O |
|
|
|
|
|
O΄ |
|||||
|
|
|
i |
||||||||||
|
|
|
|
|
|
|
|
|
|
||||
Рис. 3
16
Кафедра геометрии, СГУ, Мех-мат. Новиков В.Е.
2.Основные формулы аналитической геометрии.
Пусть относительно некоторой декартовой системы координат в пространстве известны
координаты точек A(xA , y A , z A ) , B(xB , yB , zB ) , C(xC , yC , zC ) , D(xD , yD , zD ) . Тогда справедливы следующие формулы:
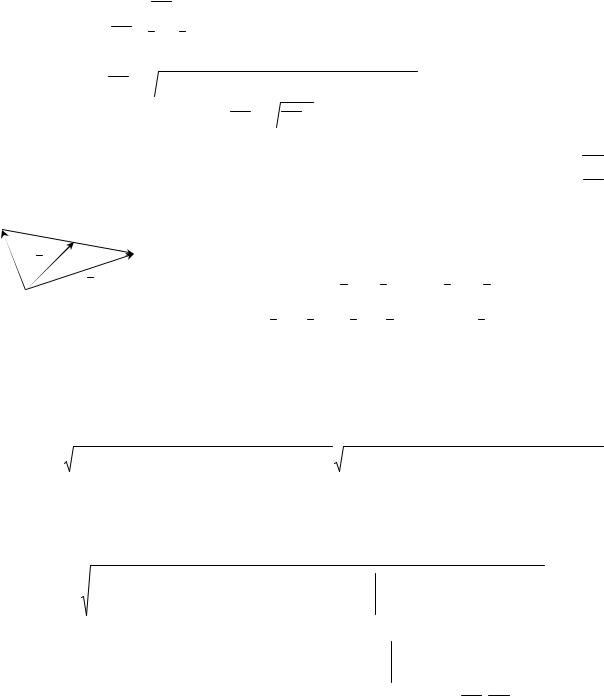
1. Координаты вектора AB(xB xA , yB y A , zB z A ) . (1)
Действительно, AB = rB rA (см. рис. 4), откуда по теореме 1.6 (о координатах линейной комбинации векторов) следует формула 1.
2. Длина отрезка | AB |  (xB xA )2 ( yB y A )2 (zB z A )2 . (2)
(xB xA )2 ( yB y A )2 (zB z A )2 . (2)
Действительно, по определению | AB |  AB2 , откуда учитывая вычисление скалярного произведения в декартовой системе координат (см. гл. 1) получим формулу 2.
AB2 , откуда учитывая вычисление скалярного произведения в декартовой системе координат (см. гл. 1) получим формулу 2.
3. Деление отрезка в данном отношении. Точка C делит отрезок AB в отношении CBAC ,
A |
|
|
|
|
|
|
|
тогда и только тогда, когда ее координаты вычисляются по фор- |
||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
C |
B |
мулам: |
|
|
xA xB |
|
|
|
|
|
|
y A yB |
|
|
|
|
|
|
z A |
zB |
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
xС |
|
, |
yС |
, zС |
|
|
. (3) |
|
|
|
|||||||||||||||||||||||||||||||||
rA |
|
r |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
1 |
|
|
|
1 |
|
|
|
||||||||||||||||||||||||||||||||
|
|
|
|
C |
|
r |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
B |
|
Действительно, |
|
|
|
|
= |
|
|
|
|
|
A , |
|
|
= |
|
B – |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
O |
|
AC |
rC – |
r |
CB |
r |
rC (см. рис. 4), AC = |
||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
= |
|
|
|
|
, тогда |
|
|
– |
|
|
|
= ( |
|
|
– |
|
|
). Откуда |
|
|
= |
rA rB |
, и фор- |
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
CB |
r |
|
|
r |
A |
r |
|
r |
|
r |
||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
Рис. 4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
C |
|
|
|
|
|
|
B |
|
|
C |
|
|
|
|
|
|
|
C |
|
1 |
||||||||||||||||||||
нации векторов). |
|
мулы 3 следуют из теоремы 1.6 (о координатах линейной комби- |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
4. Мера угла в треугольнике ABC |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
cos A |
|
|
|
(xB xA )(xC xA ) ( yB y A )( yC y A ) (zB z A )(zC z A ) |
|
|
|
|
|
. |
||||||||||||||||||||||||||||||||||||||||||||||||
|
|
(xB xA )2 ( yB y A )2 |
(zB z A )2 |
|
(xC xA )2 ( yC y A )2 (zC z A )2 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||
Действительно, cos A = |
|
|
AB |
AC |
|
, что в декартовых координатах дает формулу 4. |
||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||
| AB | | AC | |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
5. Площадь треугольника
S |
|
1 |
|
yB y A |
|
||||
2 |
|
yC y A |
||
|
|
|
На плоскости
ABC |
|
|
|
|
|
|
|
zB z A |
|
2 |
|
|
xB xA |
||
|
|
||||||
zC z A |
|
|
|
xC xA |
|||
|
|
|
|
||||
S |
1 |
mod |
|
xB xA |
|||
|
|||||||
2 |
|
xC xA |
|||||
|
|
|
|
|
|||
zB z A 2 zC z A
yB y A yC y A
|
|
xB xA |
yB y A |
|
2 |
|
|
||||
|
xC xA |
yC y A |
|
. (5a) |
|
|
|
|
|
. (5b)
Действительно, по применению векторного произведения S = 12 | [AB, AC] | , что в декарто-
вых координатах дает формулу (5a). Формула на плоскости следует из (5a), если положить все третьи координаты равные нулю, т.е. z A = zB = zC = 0.
ЗАМЕЧАНИЕ. Последнюю формулу иногда записывают иначе:
S = |
1 mod |
|
xA |
y A |
1 |
|
|
|
|
||||||
|
xB |
yB |
1 |
|
. |
||
|
2 |
|
xC |
yC |
1 |
|
|
|
|
|
|
|
Действительно, если в данном определителе вычтем первую строку от второй и третьей, а полученный определитель разложим по последнему столбцу, то получим (5b).
17

Кафедра геометрии, СГУ, Мех-мат. Новиков В.Е.
6. Объем тетраэдра ABCD |
|
|
xB xA |
|
1 mod |
|
|
|
|
||
V |
|
xC xA |
|
|
6 |
|
xD xA |
|
|
|
yB y A yC y A yD y A
zB z A
zC z A . (6) zD z A
Доказательство. По применению смешанного произведения векторов имеем Vтетраэдра = = 16 | AB AC AD|, что в декартовых координатах дает первую формулу 6.
ЗАМЕЧАНИЕ. Формулу 6 также можно записать в следующем виде:
|
|
|
xA |
y A |
z A |
1 |
|
|
|
|
|
|
|||||
V = |
1 |
mod |
xB |
yB |
zB |
1 |
. |
|
6 |
xC |
yC |
zC |
1 |
||||
|
|
|
||||||
|
|
|
xD |
yD |
zD |
1 |
|
Достаточно первую строку этого определителя вычесть от второй, третьей и четвертой, а полученный определитель разложим по последнему столбцу, чтобы получить (6).
3. Уравнения фигур.
Определение 6. Понятие фигура подразумевает некоторое произвольное подмножество точек плоскости или пространства. Поэтому с каждым уравнением (x, y, z) 0 связана неко-
торая фигура , координаты точек которой являются решением этого уравнения:
A (xA , y A , z A ) 0 .
Сама фигура называется графиком уравнения (x, y, z) 0 или фигурой, определяемой данным уравнением. Уравнение (x, y, z) 0 называется уравнением фигуры относительно заданной системы координат.
В уравнении фигуры могут присутствовать параметры (x, y, z,t1,t2 ,...,ts ) 0 , т.е. фигура может быть задана «по частям». При каждом наборе значений t1,t2 ,...,ts имеем уравнение(x, y, z,t1,t2 ,...,ts ) 0 части этой фигуры.
Свойства уравнений фигур, связанные с теоретико-множественными операциями
Пусть 1 (x, y, z) 0 и 2 (x, y, z) 0 уравнения фигур 1 и 2 соответственно.
1 . Фигура 1 является частью фигуры 2, тогда и только тогда, когда уравнение фигуры 2 является следствием уравнения фигуры 1:
( 1 (x, y, z) 0 2 (x, y, z) 0 ) ( 1 2).
2 . Фигуры совпадают тогда и только тогда, когда их уравнения равносильны, то есть
|
( 1 (x, y, z) 0 2 (x, y, z) 0 ) |
|
( 1= 2). |
||||
3 . Система уравнений некоторых фигур определяет пересечение этих фигур: |
|||||||
|
(x, y, z) 0 |
( |
(x, y, z) 0 |
|
(x, y, z) 0 ) |
( = 1 2). |
|
1 |
(x, y, z) 0 |
2 |
|||||
|
1 |
|
|
|
|
||
2 |
|
|
|
|
|
|
|
4 . Совокупность уравнений или произведение уравнений некоторых фигур определяет объединение этих фигур:
|
(x, y, z) 0 |
( 1 |
(x, y, z) 0 |
2 (x, y, z) 0 ) |
( 1 (x, y, z) 2 (x, y, z) 0 ) |
1 |
(x, y, z) 0 |
||||
|
|
|
|
|
|
2 |
|
|
|
|
|
( = 1 2).
18