

Метрология. Часть I. Расчет средств измерений
.pdf
|
|
|
|
|
|
|
Окончание табл. 76 |
|||||||||
|
|
|
|
Позиционный допуск Тpk в |
|
|||||||||||
|
|
|
|
диаметральном выражении, |
|
|||||||||||
|
|
|
|
|
|
|
|
мкм |
|
|
|
|
|
|||
Эскиз расположения |
Нормируемые отклоне- |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
ния размеров, координи- |
6 8 |
10 12 16 20 25 30 40 50 60 80 |
100 |
|||||||||||||
измерительных элемен- |
||||||||||||||||
рующих оси измеритель- |
||||||||||||||||
тов калибра |
ных элементов |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
Предельные отклонения раз- |
|||||||||||||
|
|
|
меров, координирующих оси |
|||||||||||||
|
|
|
|
измерительных элементов, |
|
|||||||||||
|
|
|
|
|
|
|
|
мкм |
|
|
|
|
|
|||
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
L |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
L |
|
Предельные отклоне- |
|
2,8 |
3,5 |
|
5,5 |
|
|
11 |
14 |
18 |
20 |
28 |
35 |
|
|
|
|
|
|
|
|||||||||||
|
L1 |
ния ± LdK размеров |
2 |
4 |
7 |
8 |
||||||||||
|
L1, L2, L3, L4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
L2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Предельные отклоне- |
|
2,8 |
3,5 |
|
5,5 |
|
|
11 |
14 |
18 |
20 |
28 |
35 |
|
|
|
ния ± LK размеров |
2 |
4 |
7 |
8 |
||||||||||
4 |
|
L1, L2, L3, L4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
L |
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
L |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
L1 |
Предельные отклоне- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
L |
ния ± LdK размеров по |
|
|
10 |
12 |
16 |
20 |
25 |
30 |
40 |
50 |
60 |
80 |
100 |
|
|
2 |
диагонали между осями |
6 |
8 |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
двух любых элементов |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Допускается вместо предельных отклонений размера между осями двух лю- |
|||||||||||||||
бых отверстий нормировать предельные отклонения размеров между осью од- |
||||||||||||||||
ного отверстия (принимаемого за базу) или базовой плоскостью и осями каждо- |
||||||||||||||||
го из остальных отверстий (Lu L2 и т. д.), при этом значение предельного откло- |
||||||||||||||||
нения, указанное в табл. 76, должно быть уменьшено вдвое. |
|
|
|
|
|
|
|
|
|
|||||||
131
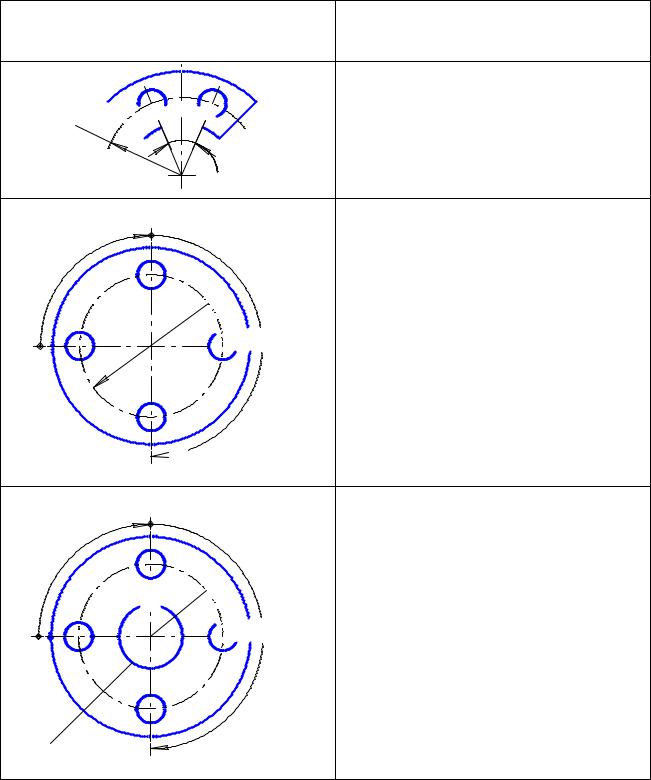
Таблица 77
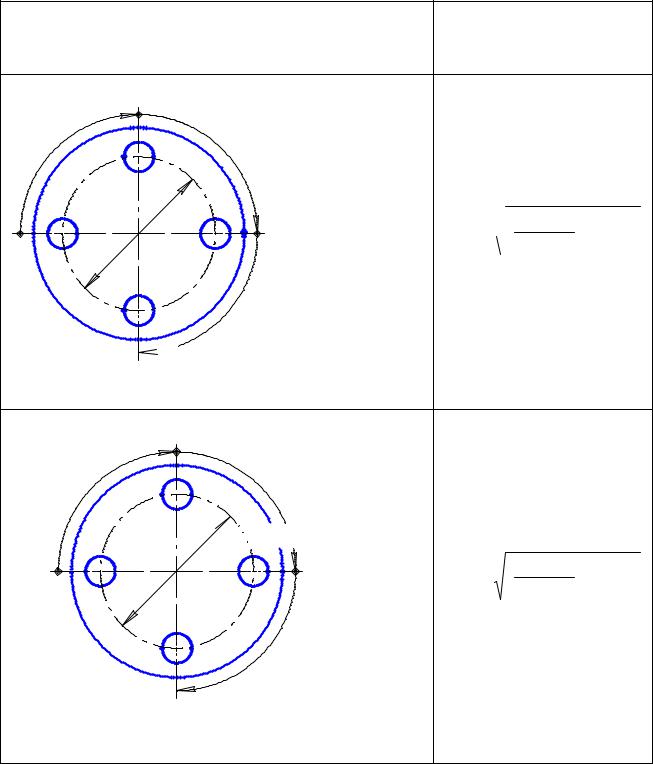
Пересчет позиционных допусков измерительных элементов калибра на предельные отклонения размеров. Система полярных координат
Нормируемые отклонения размеров, Эскиз измерительных элементов калибра координирующих оси измерительных
элементов калибра
R 










































a1
a
Предельные отклонения Rk радиуса окружности центров.
Предельные отклонения угла k между осями измерительных элементов
D


















 a2
a2
a3 










a1
Предельные отклонения Dk диаметра окружности центров.
Предельные отклонения центрального угла k между осями двух любых измерительных элементов*













 R
R 


















 a2
a2
База a3
Предельные отклонения Rk радиуса окружности центров.
Предельные отклонения центрального угла k между осями двух любых измерительных элементов*
*Допускается вместо предельных отклонений центрального угла между осями двух любых элементов нормировать предельные отклонения центральных углов между осью одного элемента (принимаемого за базу) и осями каждо-
132
го из остальных элементов ( 1, 2, 3, 4), при этом значение предельного отклонения, указанного в табл. 78, должно быть уменьшено вдвое.
Таблица 78
Предельные отклонения центральных углов калибров
Позиционный до- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
пуск Tpk в диа- |
6 |
8 |
10 |
12 |
16 |
20 |
25 |
30 |
40 |
50 |
60 |
80 |
100 |
|
метральном вы- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ражении, мкм |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Dk, мкм |
4 |
5,5 |
7 |
8 |
11 |
14 |
16 |
22 |
28 |
35 |
40 |
55 |
70 |
|
Rk, мкм |
2 |
2,8 |
3,5 |
4 |
5,5 |
7 |
8 |
11 |
14 |
18 |
20 |
28 |
35 |
|
Интервалы номи- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
нальных размеров |
|
|
|
|
|
k ; k |
|
|
|
|
|
|||
диаметров, мм |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
От 6 до 10 |
340 |
5 |
6 |
7 |
10 |
12 |
14 |
20 |
25 |
30 |
35 |
50 |
1° |
|
Св. 10 |
до 14 |
220 |
3 |
4 |
5 |
6 |
8 |
10 |
12 |
16 |
20 |
25 |
30 |
40 |
Св. 14 |
до 18 |
150 |
220 |
3 |
330 |
5 |
6 |
7 |
10 |
12 |
14 |
18 |
25 |
30 |
Св. 18 |
до 24 |
120 |
150 |
220 |
3 |
330 |
5 |
530 |
7 |
10 |
11 |
14 |
18 |
22 |
Св. 24 |
до 30 |
1 |
120 |
150 |
2 |
3 |
4 |
430 |
6 |
7 |
9 |
11 |
14 |
18 |
Св. 30 |
до 40 |
50 |
1 |
120 |
140 |
230 |
3 |
320 |
5 |
530 |
7 |
8 |
11 |
14 |
Св. 40 |
до 50 |
35 |
50 |
1 |
120 |
2 |
230 |
240 |
4 |
420 |
5 |
6 |
8 |
10 |
Св. 50 |
до 65 |
30 |
40 |
50 |
1 |
140 |
2 |
2 |
3 |
330 |
4 |
5 |
6 |
8 |
Св. 65 |
до 80 |
25 |
30 |
40 |
50 |
1 |
120 |
140 |
230 |
240 |
3 |
4 |
5 |
6 |
Св. 80 до 100 |
20 |
25 |
30 |
40 |
50 |
1 |
120 |
2 |
220 |
230 |
3 |
4 |
5 |
|
Св. 100 |
до 120 |
16 |
20 |
25 |
35 |
40 |
50 |
1 |
120 |
140 |
2 |
240 |
3 |
4 |
Св. 120 |
до 150 |
12 |
16 |
20 |
30 |
35 |
40 |
50 |
1 |
120 |
140 |
2 |
240 |
330 |
Св. 150 |
до 180 |
11 |
14 |
16 |
20 |
28 |
35 |
40 |
55 |
110 |
130 |
150 |
2 |
3 |
Св. 180 |
до 250 |
8 |
10 |
12 |
16 |
20 |
28 |
35 |
45 |
55 |
110 |
120 |
150 |
2 |
Св. 250 |
до 310 |
– |
8 |
10 |
12 |
16 |
20 |
25 |
35 |
40 |
50 |
1 |
120 |
140 |
Св. 310 |
до 400 |
– |
6 |
8 |
10 |
12 |
16 |
20 |
25 |
35 |
40 |
50 |
1 |
120 |
Св. 400 |
до 500 |
– |
5 |
6 |
8 |
10 |
12 |
16 |
20 |
25 |
30 |
40 |
50 |
1 |
Примечание. Предельные отклонения центральных углов между осью одного элемента и осями каждого элемента калибра для размеров, указанных радиусом, выбираются по этой же таблице без изменения отклонения.
8.5.2.12. Если допуски расположения поверхностей изделия указаны не позиционными допусками или предельными отклонениями размеров, координирующих оси, а другими видами допусков расположения, то для соответствующих измерительных элементов калибра должен назначаться тот же вид допуска расположения, что и для изделия.
Пересчет позиционных допусков измерительных элементов калибра на другие виды допусков расположения должен производится по формулам, указанным в табл. 79.
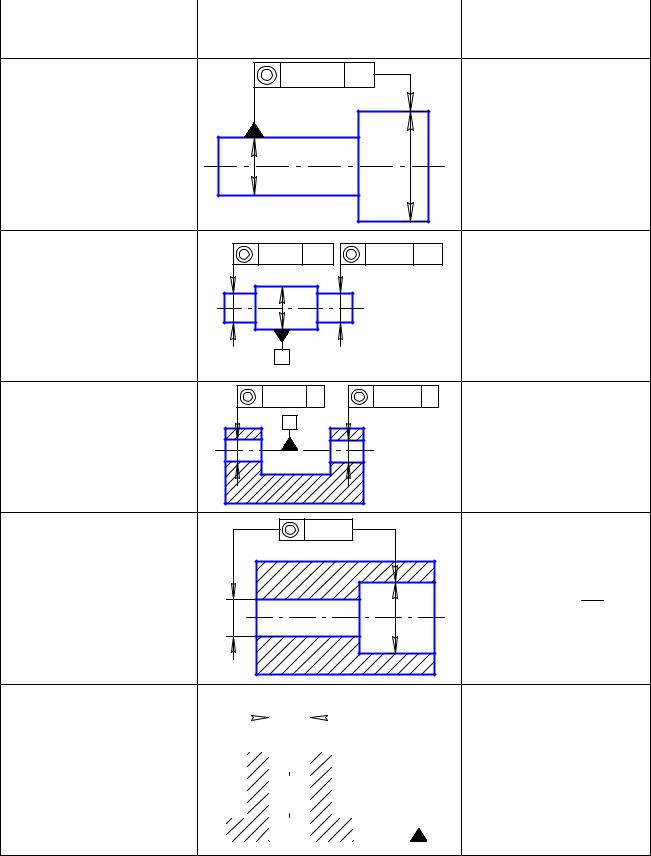
Таблица 79
133
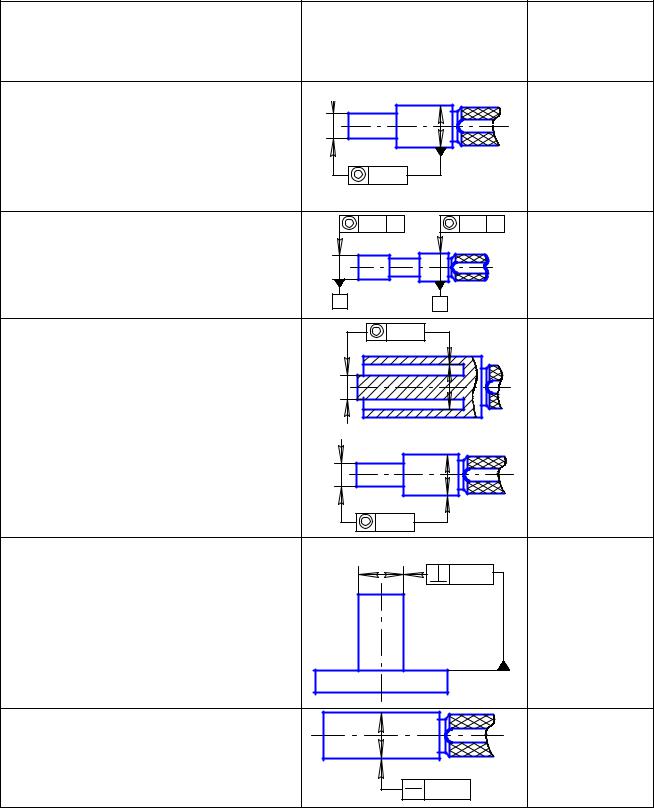
Формулы пересчета позиционного допуска измерительных элементов калибров
Вид калибра с указанием допуска
Формулы для
расположения или формы измериЭскиз
пересчета по-
тельных элементов
зиционного
допуска
Калибры для контроля соосности |
|
|
|
|
|
(симметричности) относительно |
|
|
|
|
|
оси (плоскости симметрии) базо- |
|
|
|
|
TCk=TPk |
вой поверхности с указанием до- |
|
|
|
|
|
|
|
|
|
|
|
пуска каждого измерительного |
|
ЗT |
|
|
|
|
ск |
|
|
||
элемента |
|
|
|
|
|
Калибр для контроля соосности |
|
ск1 |
АБ |
ск2 |
АБ |
(симметричности) поверхности от- |
|
ЗT |
ЗT |
||
|
|
|
|
TCk1 =TPk1 |
|
носительно общей оси с указанием |
|
|
|
|
|
|
|
|
|
TCk2 =TPk2 |
|
допуска каждого измерительного |
|
|
|
|
|
А |
|
|
|
|
|
элемента |
|
|
Б |
|
|
|
|
|
|
|
|
|
|
|
ЗT |
|
|
|
|
|
ск |
|
|
Калибр для контроля соосности |
|
|
|
|
|
(симметричности) без базового из- |
|
|
|
|
|
мерительного элемента с указани- |
|
|
|
|
TCk=TPk1+ TPk2 |
ем допуска каждого измерительно- |
|
|
|
|
|
го элемента (расположение изме- |
|
|
|
|
|
рительных элементов вписанное |
|
|
|
|
|
или смежное) |
|
|
|
|
|
|
|
ЗT |
|
|
|
|
|
|
ск |
|
|
|
|
|
|
ЗT |
|
Калибр для контроля перпенди- |
|
|
|
Rк |
|
|
|
|
|
|
|
кулярности (наклона) оси относи- |
|
|
|
|
TRk=TPk |
тельно плоскости с указанием до- |
|
|
|
|
|
|
|
|
|
|
|
пуска измерительного элемента |
|
|
|
|
|
Калибр для контроля прямолиней- |
TLk=TPk |
ности оси с указанием допуска из- |
|
мерительного |
ЗT |
|
lк |
8.5.2.13 Допуски расположения измерительных элементов калибров должны назначаться независимыми.
134
8.5.2.14.Размер между осью отверстия или вала и плоскостью и размер между осями двух отверстий или двух валов может быть проконтролирован комплектом двух проходных калибров, предельные размеры которых должны определяться по формулам, указанным в табл. 81.
8.5.2.15.Примеры расчета предельных размеров измерительных элементов калибров приведены в табл. 82.
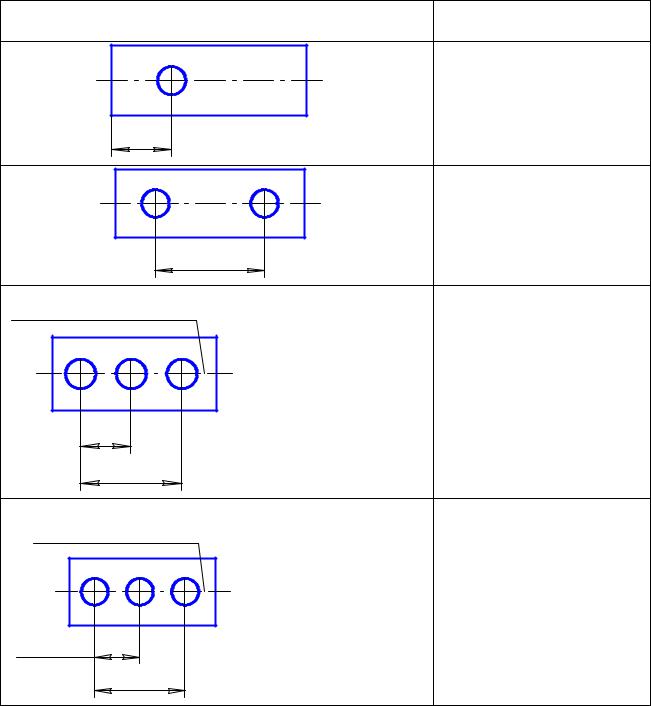
Таблица 80 Пересчет предельных отклонений размеров, координирующих оси,
на позиционные допуски
Эскиз расположения отверстий
Формулы для определения позиционного допуска Tp
L±dL |
|
Tp=2 L |
|
|
|
L ±dL |
Tp= L |
|
|
||
Общая плоскость |
1. Предельные от- |
|
|
клонения размеров |
|
|
между осями двух |
|
|
любых отв. L |
Tp=1,4 L |
|
2. Предельные от- |
|
L1 |
клонения осей от |
|
общей плоскости |
|
|
L |
y( y = 0,5 L ) |
|
2 |
|
|
Общая плоскость |
|
|
|
Предельные откло- |
|
|
нения осей от об- |
|
|
щей плоскости |
Tp=2,8 L |
L1 ±dL |
y( y = L) |
|
|
|
|
L2 ±dL |
|
|
135
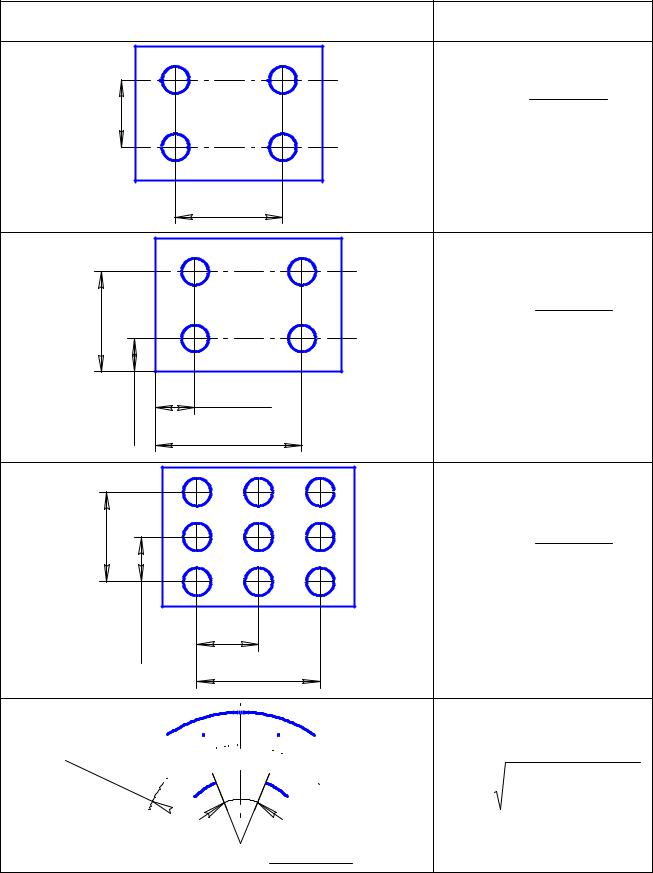
Эскиз расположения отверстий |
y |
±dL |
2 |
L |
L1 ±dLx |
y |
|
d± L |
|
4 |
|
L |
|
y |
L1±dLx |
d± L |
L2 ±dLx |
3 |
|
L |
L ±dLy 4
±dLy |
L1±dLx |
3 |
|
L |
L2 ±dLx |
|
R±dR 


















































 a±da
a±da
Продолжение табл. 80
Формулы для определения позиционного допуска Tp
Tp 
 L2x L2y
L2x L2y
при Lx = Ly= L Tp=1,4 L
Tp 2
 L2x L2y
L2x L2y
при Lx = Ly= L Tp=2,8 L
Tp 2
 L2x L2y
L2x L2y
при Lx = Ly= L Tp=2,8 L
Tp 2 ( |
δ R |
)2 R2 |
|
||
|
2 3440 |
|
136
Окончание табл. 80
Эскиз расположения отверстий
|
|
a |
Предельные от- |
|
|
|
1 |
клонения центра |
|
|
|
|
||
|
|
|
угла между осями |
|
|
|
|
двух любых по- |
|
|
|
dD |
верхностей |
|
D |
± |
a |
||
|
||||
|
|
|
2 |
a3 










a1 ±da
Формулы для определения позиционного допуска Tp
Tp 2
 ( δ R )2 R2
( δ R )2 R2
2 3440
R=0,5 D
D |
± |
|
dD 














a±da |
Tp |
2 ( |
δ R |
2 |
R |
2 |
2 |
2 3440 |
) |
|
|||
|
|
|
|
|
|
R=0,5 D
a3±da
Примечание. В формулах и в минутах, 3440 – число минут в радиане, остальные размеры, отклонения – в миллиметрах.
137
|
|
Таблица 81 |
Пересчет допусков расположения поверхностей на позиционные допуски |
||
Заданный допуск и ха- |
|
Формулы для опреде- |
рактер расположения |
Эскиз детали |
ления позиционного |
поверхностей |
|
допуска Tp |
|
ЗT |
аа |
|
Для |
базовой |
по- |
||
Допуск соосности |
с |
|
|
|
верхности: Tp=0. |
|
||
|
|
|
|
|
||||
(симметричности) по- |
|
|
|
|
Для |
рассматривае- |
||
верхности относи- |
|
|
|
|
мой |
поверхности: |
||
тельно оси (плоскости |
|
|
|
|
Tp=TC. |
|
|
|
симметрии) базовой |
|
|
|
|
|
|
|
|
поверхности |
|
|
|
|
|
|
|
|
Допуск соосности |
ЗT аАа |
ЗT аАа |
Для |
базовой |
по- |
|||
(симметричности) |
верхности: Tp=0. |
|
||||||
с1 |
|
с2 |
|
|
||||
|
|
|
|
|
|
|
||
двух и более поверх- |
|
|
|
|
Для |
остальных |
по- |
|
ностей относительно |
|
|
|
|
верхностей: |
|
|
|
оси (плоскости сим- |
|
|
|
|
Tp1=TC1 |
|
|
|
метрии) базовой по- |
А |
|
|
|
Tp2=TC2 |
|
|
|
верхности |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Допуск соосности |
ЗT аА |
|
ЗT |
аА |
|
|
|
|
(симметричности) по- |
с1 |
|
с2 |
|
|
|
|
|
А |
|
|
|
|
Tp1=TC1 |
|
|
|
верхностей относи- |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
||
тельно общей оси |
|
|
|
|
|
Tp2=TC2 |
|
|
(плоскости симмет- |
|
|
|
|
|
|
|
|
рии) |
|
|
|
|
|
|
|
|
Допуск соосности |
ЗT а |
|
|
|
|
|
|
|
(симметричности) |
|
с |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
двух поверхностей. |
|
|
|
|
|
TC |
|
|
Базовая поверхность |
|
|
|
|
|
|
||
не указана. Располо- |
|
|
|
|
Tp1= Tp2= |
2 |
|
|
жение поверхностей |
|
|
|
|
|
|
|
|
вписанное или смеж- |
|
|
|
|
|
|
|
|
ное |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ЗT а |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Допуск перпендику- |
|
|
|
|
|
|
|
|
|
R |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|||||
лярности (наклона) |
|
|
|
|
|
|
|
|
|
|
|
|
Tp=TК |
||
|
|
|
|
|
|
|
|
|
|
||||||
оси поверхности от- |
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
носительно плоскости |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Примечание. При пересчете допуска прямолинейности оси на позиционный допуск следует принимать Tp=TL.
138
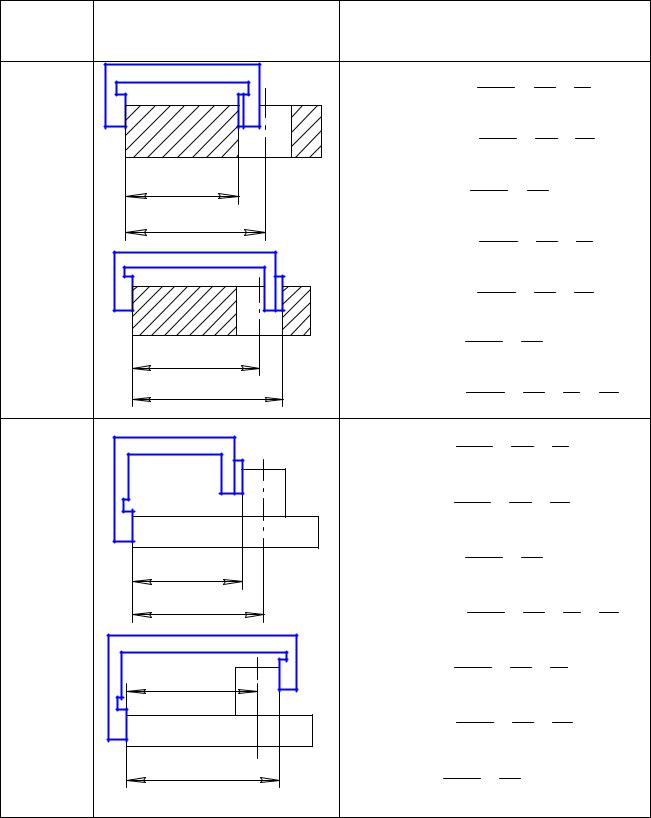
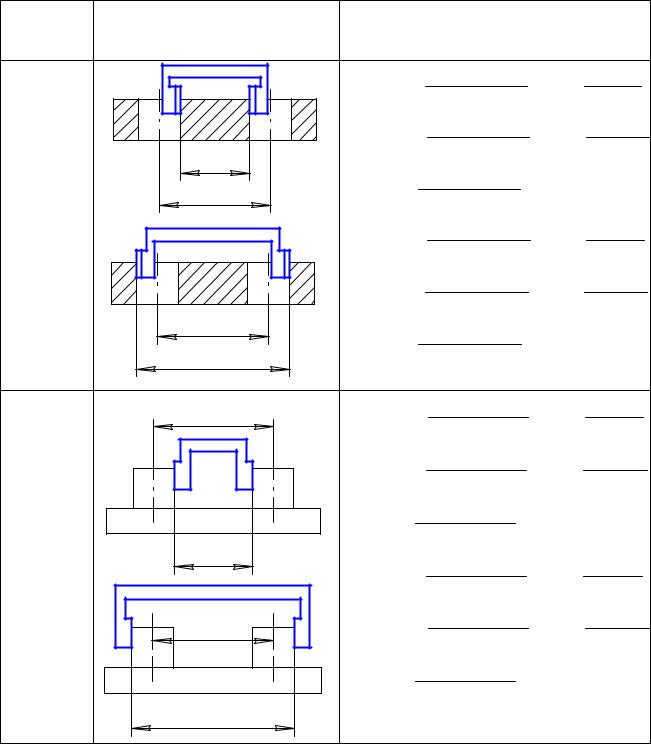
Таблица 82
Комплекты калибров-скоб для контроля размера между осью и плоскостью или между двумя осями
Контро- |
|
Формулы для расчета предельных |
|
лируемый |
Эскиз калибра |
||
размеров калибров |
|||
размер |
|
||
|
|
|
|
|
|
Amin |
L |
|
D |
min |
|
Tp |
|
|
F |
|
||||||||||||
|
|
|
|
|
|
|
2 |
|
|
|
2 |
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
Amax |
L |
|
|
D |
min |
|
Tp |
|
|
W |
|
|||||||||||
|
|
|
|
|
|
|
|
2 |
|
|
|
2 |
|
|||||||||||||
|
|
А |
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|||||
Расстоя- |
|
A |
|
|
L Dmin |
Tp |
|
|
|
|
|
|
|
|||||||||||||
ние меж- |
L |
|
|
W |
|
|
|
|
|
|
2 |
|
|
|
2 |
|
|
|
|
|
|
|
||||
ду осью |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
D |
|
|
|
Tp |
|
|
|
F |
|
||||||||
отвер- |
|
|
Bmax |
L |
|
|
min |
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
2 |
|
|
|
2 |
|
|||||||||||||||
стия и |
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
Dmin |
|
Tp |
|
|
|
W |
|
||||||||||
плоско- |
|
|
Bmin |
L |
|
|
|
|
|
|
||||||||||||||||
стью |
|
|
|
|
|
2 |
|
2 |
|
|
|
|
2 |
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
L |
BWmin |
L |
|
D |
min |
Tp |
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
2 |
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
B* |
BWmax |
L |
|
Dmin |
|
Tp |
|
F |
|
W |
||||||||||||||
|
|
|
|
|
|
2 |
|
|
|
2 |
2 |
2 |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
A |
|
L |
d |
max |
|
|
|
Tp |
|
|
|
F |
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
max |
|
|
|
|
|
2 |
|
|
|
|
2 |
|
|
|
2 |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
A |
|
L |
d |
max |
|
|
|
Tp |
|
W |
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
min |
|
|
|
|
|
2 |
|
|
|
|
|
2 |
|
|
|
2 |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Рас- |
А* |
A |
|
|
L |
|
d |
max |
Tp |
|
|
|
|
|
|
|
||||||||||
стояние |
|
|
|
|
2 |
|
|
|
|
|
|
|
||||||||||||||
Wmin |
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
между |
L |
|
|
|
|
|
|
|
dmax |
|
Tp |
|
|
|
F |
|
W |
|||||||||
осью |
ва- |
AWmax L |
|
|
|
|||||||||||||||||||||
|
|
|
2 |
|
|
|
2 |
2 |
2 |
|||||||||||||||||
ла |
(вы- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
ступа |
и |
|
Bmin |
L |
d |
|
|
|
|
|
|
Tp |
|
|
F |
|
|
|
||||||||
плоско- |
L |
|
|
max |
|
|
2 |
|
|
2 |
|
|
|
|||||||||||||
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
||||||||
стью) |
|
|
|
|
|
|
d |
|
|
|
|
|
|
Tp |
|
|
W |
|
|
|
||||||
|
|
|
Bmax |
L |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
max |
|
|
2 |
|
|
2 |
|
|
|
||||||||||||
|
|
B* |
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
||||||
|
|
Bw |
L |
|
dmax |
|
|
|
|
Tp |
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
||||
139
Контро- |
|
|
|
Окончание табл. 82 |
|||||||
Эскиз калибра |
Формулы для расчета предельных |
||||||||||
лируемый |
|||||||||||
|
размеров калибров |
|
|||||||||
размер |
|
|
|
||||||||
|
|
L D1min |
D2min |
|
|
|
|
|
F1 F2 |
||
|
|
A |
T |
p |
|||||||
|
|
min |
|
2 |
|
|
|
2 |
|||
|
|
|
|
|
|
|
|
|
|||
|
|
A |
L D1min |
D2min |
T |
p |
W1 W2 |
||||
|
A |
max |
|
2 |
|
|
|
|
2 |
||
|
|
|
|
|
|
|
|
||||
Расстоя- |
L |
AW L D1min D2min Tp |
|
|
|
||||||
ние меж- |
|
|
2 |
|
|
|
|
|
|
||
ду осями |
|
Bmax |
L D1min |
D2min |
Tp |
F1 F2 |
|||||
двух от- |
|
|
|
2 |
|
|
|
|
|
2 |
|
верстий |
|
Bmin |
L D1min |
D2min |
Tp |
W1 W2 |
|||||
|
|
||||||||||
|
L |
|
|
2 |
|
|
|
|
|
2 |
|
|
BW L D1min D2min |
Tp |
|
|
|
||||||
|
B |
|
|
|
|||||||
|
|
2 |
|
|
|
|
|
|
|||
|
L |
Amax |
L d1max |
d2max |
Tp |
F1 F2 |
|||||
|
|
|
|
2 |
|
|
|
|
|
2 |
|
|
|
A |
L d1max |
d2max |
T |
p |
W1 W2 |
||||
|
|
min |
|
2 |
|
|
2 |
||||
|
|
|
|
|
|
|
|
|
|||
Расстоя- |
|
A L d1max d2max T |
p |
|
|
|
|
||||
ние меж- |
A |
w |
2 |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|||||
ду осями |
Bmin |
L d1max |
d2max |
Tp |
F1 F2 |
||||||
двух ва- |
|
||||||||||
лов (вы- |
|
|
|
2 |
|
|
|
|
|
2 |
|
L |
|
L d1max |
d2max |
|
|
|
|
|
W1 W2 |
||
ступов) |
Bmax |
Tp |
|||||||||
|
|
|
|
2 |
|
|
|
|
|
2 |
|
|
|
Bw L d1max d2max Tp |
|
|
|
|
|||||
|
B |
|
2 |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
||
Примечания:
1.При контроле калибрами размеров, отмеченными знаком*, соответствующая измерительная поверхность калибра должна прилегать к базовой плоскости изделия.
2.Изделие считается годным, если в него проходят оба калибра (с размерами А и В), входящие в комплект.
140