

Ахлюстина_Приспособления
.pdfУравнение силового замыкания:
Q |
W1 |
W2 |
, |
|
|||||
|
|
|
i |
, |
|||||
где W – сила сжатия лепестков цанги |
|||||||||
|
|
|
|
||||||
i |
|
|
1 |
|
, |
|
|
||
|
|
|
|
|
|||||
|
tg( |
) |
|
|
|||||
2 |
|
|
|
||||||
|
|
|
|
|
|
|
|
||
где α = 30...40 – для цанг; φ– угол трения Усилие зажима заготовки можно определить по формуле
W k 
 M 2 / r 2 P 2 , f1
M 2 / r 2 P 2 , f1
где k – коэффициент запаса;
M – момент, передаваемый цангой;
r – радиус базовой поверхности заготовки; P – осевая сила, сдвигающая заготовку; f1 – коэффициент трения.
для 3-х лепестковой цанги – W |
6 10 |
3 |
SD 3 |
, |
||||
|
|
l |
3 |
|
||||
|
|
|
|
|
|
|
|
|
для 4-х лепестковой цанги – W 2 10 3 |
|
SD 3 |
|
, |
||||
|
|
l3 |
|
|||||
|
|
|
|
|
|
|
||
где D – диаметр цанги в опасном сечении, мм;
S– толщина лепестка цанги, мм;
–зазор между цангой и заготовкой на сторону, мм;
l – длина лепестка цанги, мм.
(3.5.4.7)
(3.5.4.8)
(3.5.4.9)
(3.5.4.10)
(3.5.4.11)
3.5.5. Эксцентриковые силовые механизмы
Стандартные круглые эксцентрики (рис. 21) являются самотормозящими и их предельные размеры: эксцентриситет e=1,7…4 мм; диаметр D =32…80 мм.
S – ход эксцентрика; – наибольший угол поворота рукоятки; α – начальный угол установки эксцентрика; В – ширина эксцентрика; Q – необходимое усилие для зажима; L – длина рукоятки.
Необходимая величина эксцентриситета
e |
S |
(3.5.5.1) |
, ( мм). |
cos cos( )
В таких механизмах эксцентрик представляет собой диск со смещенной осью вращения (на величину эксцентриситета е).
31

Угол подъема α (угол клина) образуется при вращении эксцентрика вокруг оси.
Уравнение силового замыкания имеет вид:
M Q |
|
We |
, |
|
|||
|
|
i |
|
передаточное отношение: i |
1 |
, |
|
1 sin( )
тогда момент от усилия зажима заготовки будет
M Q We(1 sin( )) ,
Сила действующая на заготовку
Q
W 1 sin( ) .
Q
|
2 |
e |
|
|
|
|
|
||
|
|
|
||
|
|
|
||
|
|
|
|
|
L |
|
|
|
|
|
|
|
|
|
|
|
|
|
R |
|
|
|
|
|
e |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(3.5.5.2)
(3.5.5.3)
(3.5.5.4)
(3.5.5.5)
S |
W |
|
Рис. 21. Схема действия сил на эксцентриковый зажим
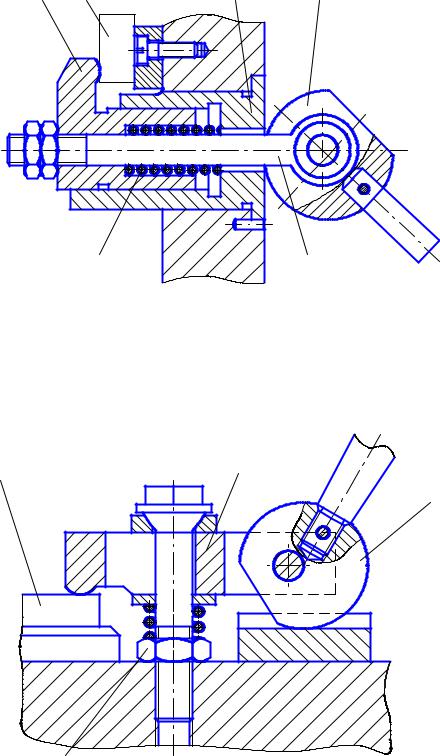
Эксцентриковый зажим с Г-образным прихватом (сапожком рис. 22) удобен в эксплуатации. При ослаблении усилия зажима (при повороте эксцентрика на небольшой угол) прихват поворачивается, заготовка освобождается [1].
Эксцентриковый зажим данной конструкции применяется в тех случаях, когда по условиям закрепления зажимающий эксцентрик должен быть вынесен за стенку приспособления. Заготовка зажимается Г-образным прихватом 1, установленном в стакане 2, при действии эксцентрика 3 на фланец стакана 2. Возврат прихвата в исходное положение осуществляется пружиной 5
32
1 |
Заготовка |
2 |
3 |
|
5 |
|
4 |
Рис. 22. Эксцентриковый зажим с Г-образным прихватом
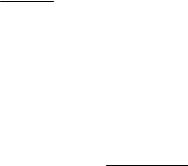
Схема зажима заготовки регулируемым прихватом (рис. 23).
Положение прихвата регулируется по высоте гайкой 2. При установке и съеме заготовки прихват 1 отводится вместе с эксцентриком 3 .
Заготовка |
1 |
|
3 |
2 |
|
Рис. 23. Эксцентриковый зажим с отводным прихватом |
|
Зажим эксцентриковый тисочного типа (рис. 24) работает по следующей схеме: двухсторонний эксцентрик 3 при повороте рукоятки разводит плунжеры 4, которые через кулачки 2 сообщают усилие зажимающим ползунам 1. При раскреплении ползуны отводятся пружинами.
33

|
1 |
Заготовка |
2 |
4 |
|
|
|
3 |
|
Рис. 24. Зажим эксцентриковый тисочного типа |
|
Для обеспечения зажима детали, изготовленной по наименьшему предельному размеру, необходимо, чтобы e 1…1,5 ,
где – допуск на зажимаемый размер.
Наименьший радиус цапфы эксцентрика (из условия самоторможения)
R=5е[1–sin( + )], (мм). (3.5.5.6)
Наименьший радиус цапфы эксцентрика (из условия идеального давления)
r |
Q |
, (мм). |
(3.5.5.7) |
||
0,48 |
|||||
|
|
СМ |
|
|
|
При материалах сталь по стали [ ]СМ=10 Н/мм2. |
|
||||
Наименьший радиус диска эксцентрика Rmin=10 (e–0,1r), (мм). |
|
||||
Наибольший радиус диска эксцентрика Rmax=10 e sin( + )+r, (мм). |
|||||
Усилие зажима эксцентриком |
QL |
|
|
|
|
W |
|
|
, (Н), |
(3.5.5.8) |
|
|
|
|
|||
S[e 0,1(r R)]
где L – длина плеча рукоятки, мм.
Угол трения = 5◦…6◦
3.6. Разработка расчетной схемы зажимного устройства
Расчетная схема зажимного устройства разрабатывается на основе принципиальной схемы СП в упрощенном виде силового привода, силового механизма и контактного элемента [6]. После изображения структурных элементов зажимного
34

устройства на расчетную схему наносят силы закрепления W и тяговое усилие Q (или крутящий момент), которые обеспечивают привод, основные размеры силового привода, например, диаметр пневмоцилиндра, плечи рычажного механизма.
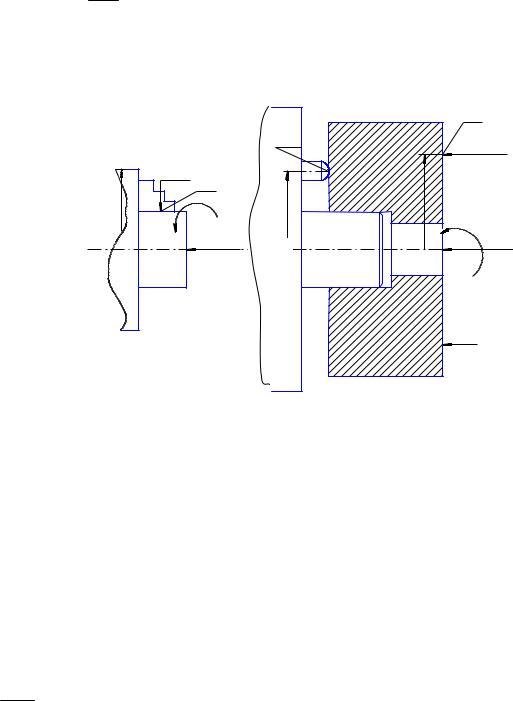
ПРИМЕР 1 Разработать расчетную схему зажимного устройства оправки.
Особенность схемы (рис. 25) зажимного устройства – отсутствие силового механизма, а определяемым параметром здесь является диаметр пневмоцилиндра D.
D
W/2 Q |
W |
, (Н); |
(3.6.1) |
|
|||
|
|
|
|
|
|
|
Q |
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
W/2 Q |
D2 |
р, (Н); |
(3.6.2) |
||||
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
4 |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
D |
|
4Q |
|
, (мм). |
(3.6.3) |
||
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|||||||
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
p |
|
|||
Рис. 25. Схема силового привода
ПРИМЕР 2
Разработать расчетную схему зажимного устройства приспособления.
l1 |
l2 |
W |
|
Заготовка |
Q |
|
D |
Рис. 26. Схема силового привода с силовым механизмом
Особенность схемы зажимного устройства – наличие силового механизма и силового привода, параметры которых (l1 ,l2 и D) определяют соответствующими расчетами рис. 26
Q W |
(3.6.4) |
i . |
35

Расчетные формулы имеют вид: |
|
|
|
4Q |
|
|
|||
Q |
(D2 d 2 ) |
p , (Н ) |
и (D 2 d 2 ) |
, (мм), |
(3.6.5) |
||||
|
|
||||||||
4 |
|
|
|
|
p |
|
|||
где d – диаметр штока; |
|
l1 l2 |
|
|
|
|
|||
i - передаточное число механизма i |
; |
(3.6.6) |
|||||||
|
|||||||||
|
|
|
|
l2 |
|
||||
η= 0,95 – рычажного механизма, η = 0,85 – для пневмоцилиндра.
3.7.Зажимное устройство, предупреждающее смещение заготовки от действия сил
1.Сила Р, возникающая при обработке деталей, и сила закрепления W прижимают заготовку к опорам приспособления (рис. 27, а). При постоянном
значении силы Р , сила W=0. этой схеме соответствуют операции обтачивания в центрах, протягивания отверстий, цекования бобышек [6]. Если возникают допонтельные сдвигающие силы N, направленные против силы закрепления, то W=kN, где k–коэффициент запаса ( k >1).
При нестабильной силе Р ( при фрезеровании) должно быть W >0 для предупреждения вибраций, зазоров в системе и для повышения её жёсткости.
2. Сила Р направлена против зажимного устройства (рис. 27, б). Для зажимного
устройства второго типа W=kP. Силу W при наличии зажимного |
устройства пер- |
||
вого типа определяют по формуле |
|
|
|
W=kP |
J2 |
. |
(3.7.1) |
|
|||
J1 J2
3. Силы, возникающие при обработке, стремятся отодвинуть заготовку от опор (рис. 27, в). Эта схема характерна для случаев, когда направление подачи инструмента меняется (фрезерование замкнутых контуров). Смещение заготовки предупреждается силами трения, возникающими в местах контакта заготовки с опорами и зажимными элементами. Согласно этому условию Р<Wf1+Wf2, где f1 и f2 – коэффициенты трения заготовки с установочными и зажимными элементами.
Вводя коэффициент запаса k >1, получим окончательно W= kP . f1 f2
Эта расчётная схема применима для случая установки на два пальца и перпендикулярную к ним плоскость.
Из условий точности обработки и предохранения базового отверстия от вмятин ромбического пальца сила резания должна восприниматься силой трения на базовой плоскости заготовки, т.е. пальцы должны быть разгружены.
36

|
W |
|
W |
|
|
|
W f1 |
|
|
P |
|
P |
|
|
|
P |
f2 |
|
|
|
|
|
|
|
|
|
а) |
a) |
|
б) |
|
|
в) в) |
|
|
|
|
W f1 |
б) |
|
|
W f1 |
|
|
|
|
|
|
|
|
|
||
|
|
P2 |
|
|
P1 |
P2 |
|
|
|
|
P1 |
f2 |
|
|
f |
|
|
|
|
|
|
|
|
2 |
|
|
|
|
г) г) |
|
|
д)) |
|
|
|
|
|
|
|
|
l |
|
F2 |
|
|
|
|
f |
|
|
|
|
|
|
|
|
R |
a |
|
|
|
|
|
|
|
|
W |
|
|||
|
|
|
|
|
|
|||
|
|
|
O |
F |
|
|
||
|
|
|
|
R1 |
F1 |
|
||
|
|
|
|
c |
n |
O |
|
|
|
|
|
|
|
b |
1 |
m |
|
|
|
е) |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
e) |
Р2 |
Р1 |
жж)) |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
е |
|
|
|
|
|
|
|
|
W |
|
|
|
|
|
|
|
|
|
Wf2 |
|
|
|
|
з)з)
Рис. 27. Схемы установки заготовки в приспособлении
исхемы сил возникающих при обработке
4.Силы, возникающие при обработке (рис. 27, г), направлены против опор
(сила Р1) и одновременно стремятся сдвинуть заготовку в боковом направлении
37
(сила Р2). При достаточной жёсткости опор и наличии зажимного устройства второго типа силу W находим по аналогии с предыдущим случаем P2<(W+P1)f2+Wf1
|
|
|
|
|
|
|
|
|
|
W= |
kP2 |
P1 f2 |
|
, |
|
|
|
(3.7.2) |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
если kP2<P1f2 и вибраций нет, то W=0. |
f1 f2 |
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
В приспособлениях с зажимами первого типа действие силы Р1 |
вызывает из- |
||||||||||||||||||||||||||
менение установившихся реакций опорных и зажимных элементов. |
|
||||||||||||||||||||||||||
По аналогии с п.2 |
R2=W+P1 |
|
|
|
|
J1 |
|
|
|
и R1=W+P1 |
|
J1 |
. |
|
|||||||||||||
|
J1 |
J2 |
J1 |
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
J2 |
|
|||||||||||
Силы трения, препятствующие сдвигу заготовки, F=f1R1+f2R2. |
|
||||||||||||||||||||||||||
Из условий закрепления |
F=kP2 , получим |
|
|
|
|
|
|
||||||||||||||||||||
|
|
kP |
|
fP |
|
|
|
J1 |
|
|
f |
P |
|
|
J1 |
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
W= |
|
2 |
|
|
|
1 |
|
J1 J2 |
|
|
|
2 1 |
|
J1 J2 |
. |
|
(3.7.3) |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
f1 f2 |
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
kP |
|
P |
( f |
f |
2 |
) |
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
при J1=J2 |
W= |
|
|
2 |
|
|
2 |
|
1 |
|
|
|
|
. |
|
|
|
|
|
|
|
(3.7.4) |
|||||
|
|
|
|
f1 f2 |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
kP2
если f1=f2=f , то W= f1 f2 .
5. Сила P1 направлена навстречу силе закрепления (рис. 27, д). Сила закрепления W должна быть достаточной для обеспечения контакта заготовки с опорами приспособления и предупреждения её сдвига в направлении действия силы Р2. При зажимном устройстве второго типа первому условию отвечает равенство W’=k1P1, а второму равенство – k2P2=W’’+(W’’–P1)f2; отсюда:
P1 f2 k2P2 |
|
|
|
W’’= |
f1 f2 |
. |
(3.7.5) |
Из найденных значений W’ и W’’ выбирают большее.
При использовании зажимного устройства первого типа первому условию
удовлетворяет равенство: W’=k1P1 |
|
J1 |
. |
|
|
|
|
|
|
|
(3.7.6) |
||||||
J1 |
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
J2 |
|
|
|
|
|
|
|
|
||||
Второму условию должно отвечать равенство: |
J2 |
|
|
||||||||||||||
|
k2P2=f1(W’’+P1 |
|
|
J1 |
|
|
)+f2(W’’–P1 |
|
), |
(3.7.7) |
|||||||
|
|
|
|
|
|
|
|||||||||||
|
|
J1 |
|
|
|
||||||||||||
|
|
|
|
|
J2 |
|
|
|
|
|
J1 J2 |
|
|||||
|
|
k P f P |
|
|
J1 |
f |
P |
J1 |
|
|
|
|
|
||||
|
|
J1 J2 |
J1 J2 |
|
|
|
|||||||||||
тогда |
W’’= |
2 2 1 1 |
|
|
|
2 1 |
. |
|
|
(3.7.8) |
|||||||
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
f |
f2 |
|
|
|
|
|
|
|
|
|||
Силу закрепления W принимают по большему из значений W’ и W’’.
38
При выборе схем установки нужно обеспечивать три условия: заготовка должна занимать устойчивое положение до приложения сил закрепления; в процессе закрепления заготовки не должно быть нарушено приданное ей при установке положение; силы, возникающие при обработке, не должны смещать заготовку. Первое условие обеспечивают правильной расстановкой элементов относительно центра тяжести заготовки, второе – выбором направления и места приложения силы закрепления, выполнение третьего условия рассмотрено в приведённых выше примерах расчёта.
На рис. 27, е показана схема обработки заготовки, закреплённой горизонталь-
но приложением силы W. Плечо а силы W (рис. 27, ж) должно быть выбрано таким, чтобы заготовка была плотно приложена к установочным элементам приспособления. До начала обработки на заготовку кроме силы закрепления W действу-
ют реакции опор R и R1, а также силы трения F, F1, F2 (массу заготовки не учитываем). Последние четыре силы препятствуют повороту заготовки по часовой стрелке от действия силы W. Приравняв сумму моментов сил относительно точки 0 нулю, получим:
R1(b f1c)
W= |
a f2l |
. |
(3.7.9) |
Из суммы моментов сил относительно точки 01, равной нулю, |
находим |
||
W(n+f2m)=R(c–fb), где f, f1, f2 – коэффициенты трения в местах касания заготовки опор приспособления и зажимных элементов.
Подставляя значение силы W, получим:
|
R(c–fb)= |
R1(b f1c)(n f |
2 m) |
, |
(3.7.10) |
||||
|
|
|
|
|
|||||
|
|
|
a f2l |
|
|
|
|
|
|
|
|
|
(b f1c) f2 |
|
1 |
|
|
|
|
где R1=Rf – Wf2. |
R=R1 1 |
|
|
|
|
(3.7.11) |
|||
a f2c |
|
f |
|||||||
|
|
|
|
|
|||||
После преобразований получим, что при любом значении силы W
|
(b f1c)(n f |
2m) f |
|
|
|
a |
|
|
(b f1c) |
f2l |
(3.7.12) |
c fb |
|
||||
|
|
|
|
|
|
При установившемся процессе на заготовку действуют силы Р1 и Р2 (рис. 27, з). Из условия равновесия Wa+Wf2l–kP2e–kPl=0;
k(P2e P1l)
W= |
|
, |
(3.7.13) |
a f2l |
где k – коэффициент запаса.
39
3.8. Зажимное устройство, предотвращающее проворачивание заготовки от действия момента
1. Заготовка, установленная в трёхкулачковом патроне, находится под действием момента М и осевой силы Р (рис. 28, а). Силу закрепления можно найти из
kM
равенства W=3fR, где R – радиус заготовки; f – коэффициент трения её поверх-
ности в кулачках. При больших значениях Р могут возникнуть дополнительные силы трения между торцом заготовки и уступами кулачков.
W |
f |
|
R |
M |
P |
f2 |
|
f |
|
|
|
W |
|
R |
2 |
M |
P |
1 |
|
|
|
|
R |
|
|
а) |
б) |
Рис. 28. Схемы установки заготовки в патроне |
|
Если |
P |
>f1W (где f1 – коэффициент трения при сдвиге заготовки вдоль кулач- |
|||||||
|
|||||||||
3 |
|
|
|
|
|
Р3 |
|
||
ков), то расчёт W следует вести из условия |
kM=3fRW+3f2R1( |
–f1W), |
|||||||
|
|||||||||
|
|
|
|
|
3 |
|
|||
|
|
W= |
kM f2R1P |
|
|||||
|
|
|
|
, |
(3.8.1) |
||||
|
|
3fR 3f |
f R |
||||||
1 |
2 |
1 |
|
|
|
||||
где f2 – коэффициент трения заготовки с уступами кулачков; R1 – средний радиус расположения площадки контакта.
При противоположном направлении силы Р следует пользоваться формулой
kM
W= 3 fR .
Значение W проверяют на невозможность осевого сдвига заготовки по форму-
ле kP=3f1W.
40