

118
5. ПРИМЕНЕНИЕ СИСТЕМЫ MATLAB
ДЛЯ РЕШЕНИЯ ЗАДАЧ МОДЕЛИРОВАНИЯ ЭЛЕМЕНТОВ БТС
5.1. Общая характеристика системы MATLAB
Система MATLAB является одной из самых мощных в компьютерной математике. Разработчиком базового ядра системы, а также его многочисленных расширений является корпорация MathWorks Inc (USA). (http // www.mathworks.com).
Это одна из старейших систем математических расчетов, построенных на реализации матричных операций. Одним из главных достоинств системы является ее открытость и расширяемость. Эти свойства проистекают из наличия специального (очень простого) языка программирования высокого уровня. Большинство команд и функций системы реализованы в виде m- файлов (текстовые файлы) и файлов на языке Си. Все файлы доступны для модификации.
Ядро системы включает программу-интерпретатор команд, что позволяет проводить вычисления и отладку в удобном пошаговом режиме. В качестве средства повышения производительности следует упомянуть специальный компилятор.
Система MATLAB является лидером в области реализации численных методов и методов математического моделирования.
Систему сопровождает большое количество М-файлов (расширение *.m), содержащих демонстрационные примеры и определения новых операторов и функций. Эта библиотека, все файлы которой снабжены обширными комментариями, позволяет изучать исходный текст модулейфункций. Система имеет открытую архитектуру, что позволяет изменять существующие функции и добавлять свои, новые.
Система MATLAB интегрирует около 50 программных продуктов. В ядро системы входят базовая версия MATLAB и пакет моделирования Simulink. Все расширения системы объединены в модуль Toolbox.
Система поддерживает несколько режимов работы, основными являются командный (режим прямых вычислений) и программно-исполняемый (режим исполнения программ, в котором осуществляется интерпретация или запуск компилированных бинарных файлов).
При запуске системы MATLAB на экран выводится командное окно (рис.5.1), которое используется для ввода отдельных команд и выполнения вычислений в режиме интерпретации. Управляющее меню включает группы команд работы с файлами (File), редактирования, настройки окон интерфейса, вывод панелей инструментов (View) (рис.5.2), поддержку работы системы через Internet (Web) и др.
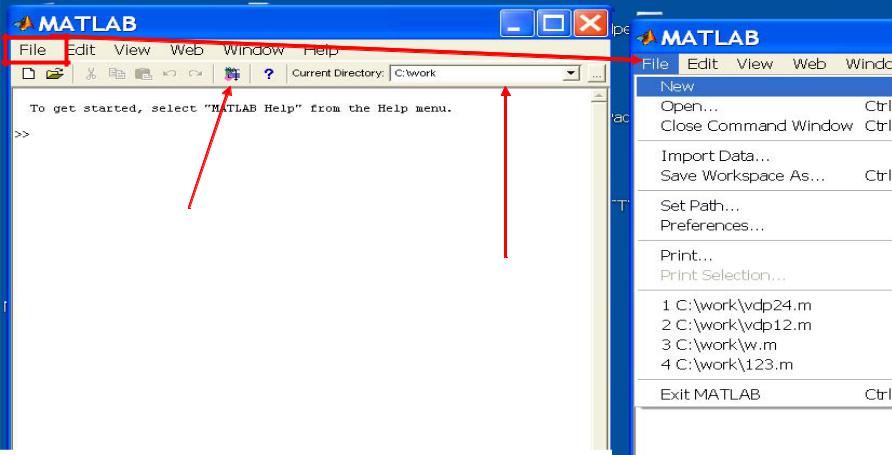
Запуск Simulink
Рабочая папка
Рис.5.1. Командное окно при запуске системы MATLAB
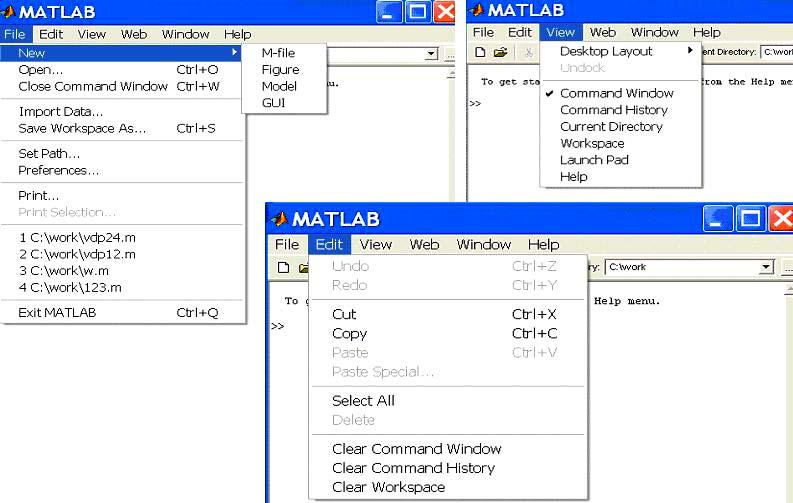
Рис.5.2. Команды работы с файлами (File), редактирования (Edit), настройки окон интерфейса (View)
121
Команда File / New / M-file открывает окно редактора и отладчика М-файлов (рис.5.3). Это текстовые файлы, написанные на входном языке высокого уровня.
Рис.5.3. Окно редактора и отладчика М-файлов
Кроме основных для всех проблемно-ориентированных языков команд входной язык поддерживает обращение к множеству специальных функций и модулей, позволяющих решать задачи фильтрации, спектрального, дисперсионного, кластерного анализа и т.д. После ввода текста программы и ее сохранения в М-файле программа может ставиться на выполнение
(команда Debug // Run ).
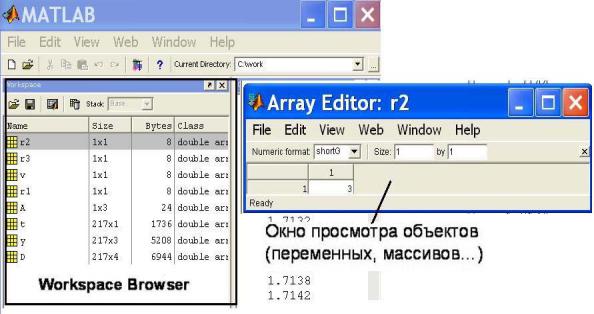
Система ориентирована прежде всего на реализацию матричных вычислений, т.е. на обработку больших массивов и векторов. Для просмотра результатов вычислений имеется специальное окно Workspace Browser – просмотр ресурсов рабочего пространства памяти (рис.5.4).
Текстовые М-файлы можно создавать в специальном редакторе, который выполняет функции: редактирование текста программы, синтаксический контроль, расстановка контрольных точек в теле программы (для приостановки вычисления и промежуточной оценки результатов), сохранение программы в текстовом файле. Для набора программы можно использовать также любой текстовый редактор, поддерживающий формат
ASCII.
122
Рис.5.4. Окно Workspace Browser – просмотр ресурсов рабочего пространства памяти
При выполнении синтаксического контроля введена цветовая разметка: ключевые слова – синий цвет; операторы, константы и переменные – черный;
комментарии после знака % - зеленый цвет; символьные переменные (в апострофах) – коричневый цвет; синтаксические ошибки – красный цвет.
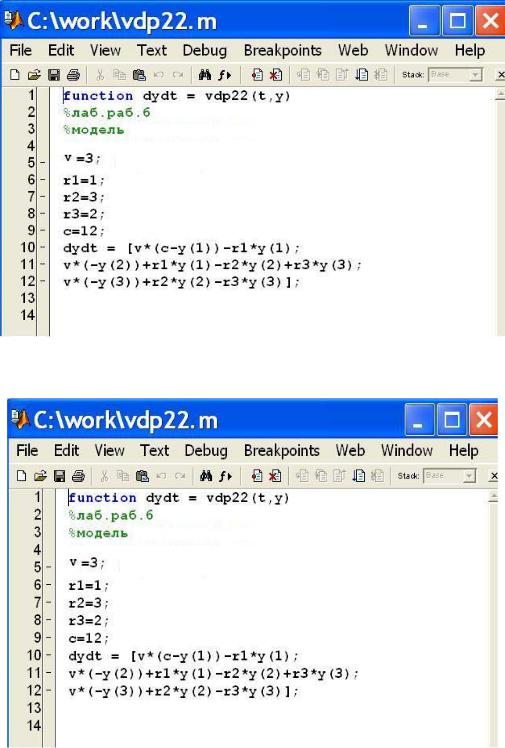
М-файлы, создаваемые отладчиком, делятся на файлы функции, имеющие входные параметры (рис.5.5) и - файлы-сценарии, не имеющие входных параметров.
Файл-функция имеет входные параметры, входящие в него переменные являются локальными.
Файл-сценарий не получает данных извне с помощью списка входных параметров, это простая процедура без параметров. Может использовать глобальные переменные, является просто записью серии команд без входных и выходных параметров (рис.5.6).
Файл-сценарий имеет следующую структуру:
%Основной комментарий %Дополнительный комментарий
Тело файла с любыми выражениями.
Для файлов-сценариев характерно отсутствие входных и выходных аргументов, работа с данными из рабочей области. В процессе выполнения они не компилируются и могут рассматриваться как аналог сессии.
123
Рис.5.5. Пример файла функции
Рис.5.6. Пример файла сценария
Файл-функция является объектом языка программирования системы MATLAB. С точки зрения структурного программирования он является полноценным модулем. Структура файла-функции приведена в табл.5.1.
Функции могут быть встроенные (внутренние) и внешние (М-

124
функции). Встроенные функции хранятся в откомпилированном ядре системы MATLAB, поэтому они выполняются очень быстро. Внешние функции содержат свои определения в М-файлах. Задание таких функций возможно организовать при написании новых М-файлов.
|
Таблица 5.1. |
Команды |
Коментарии |
Function |
Объявление типа |
var=f_name(список параметров) |
|
Function |
Имя переменной выходного пара- |
var |
метра |
f_name |
Имя функции |
(список параметров) |
Список входных паарметров |
При обнаружении файла-функции он компилируется и затем исполняется, а созданные машинные коды хранятся в рабочей области системы
Var=выражение |
Вводится, если требуется, чтобы |
|
функция возвращала результат вы- |
|
числения. |
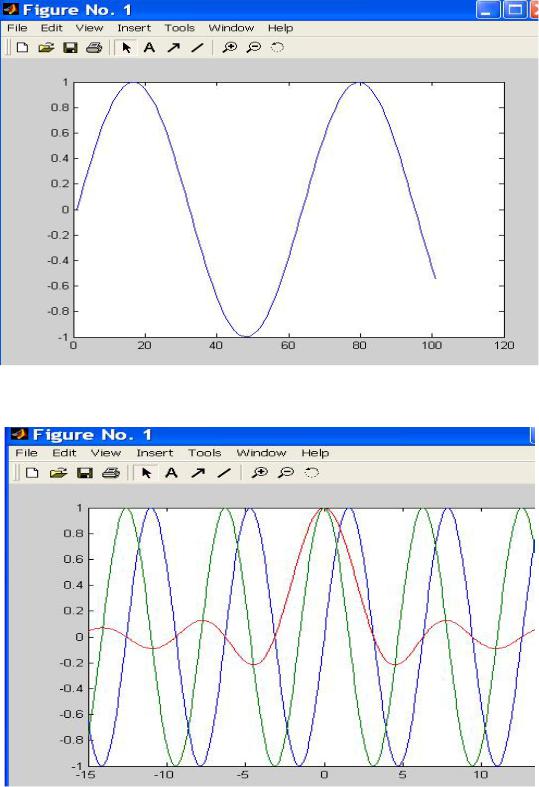
Простейшие формы команды вывода графиков показаны в табл. 5.2. Таблица 5.2.
Задача Команда Результат выполнения команды
Построить график функ- |
>> x=0:0.1:10; |
|
|
|||
ции |
sin(x) |
на интервале |
>> plot(sin(x)) |
|
Рис. 5.7 |
|
от 0 |
до 10, с шагом 0,1 |
|
|
(No 1) |
||
Построить графики |
|
> x=0.1:0.1:10; |
|
|
||
функций |
y1(x); |
y2(x); |
>> y1=sin(x); y2=cos(x); |
Рис. 5.8 |
||
y3(x) на интервале от 0.1 |
y3=sin(x)./x; |
(деление |
||||
до 10, с шагом 0,1 |
|
вектора на массив) |
|
(No 1) |
||
|
|
|
|
>> plot(x,y1,x,y2,x,y3) |
|
|
|
|
|
|
вывод трех графиков |
|
|
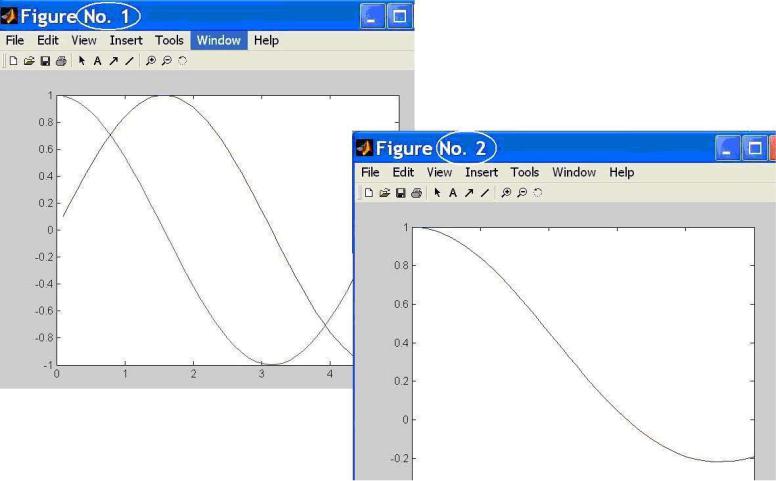
Построить графики |
|
> x=0.1:0.1:5; |
|
|
||
функций y1(x); y2(x); в |
>> y1=sin(x); y2=cos(x); |
Рис. 5.9 |
||||
окне 1, |
|
|
y3=sin(x)./x; |
(деление |
||
y3(x) в окне 2 |
|
вектора на массив) |
|
(No 1 и |
||
на интервале от 0.1 |
до 5, |
>>plot(x,y1,x,y2) вывод |
No 2) |
|||
с шагом 0,1 |
|
|
двух графиков в окне 1 |
|
||
|
|
|
|
>> figure; |
|
|
|
|
|
|
>> plot(x,y3) вывод 3-го |
|
|
|
|
|
|
графика в окне 2 |
|
|
125
Рис.5.7. Пример формирования графика функции sin(x)в отдельном окне
Рис.5.8. Пример формирования графиков функций sin(x); cos(x); sin(x)./x в одном окне
Для построения М-файлов используются простейшие управляющие структуры (табл.5.3).
126
Рис.5.9. Вывод графиков в двух окнах
|
|
127 |
|
|
|
|
|
Таблица 5.3. |
|
|
|
|
|
|
Команды (операторы) |
|
Комментарии |
||
|
|
|
|
|
r=input(‘ввод радиуса = ‘); |
|
диалоговый ввод данных |
|
|
|
|
|
Допустим ввод символьных вы- |
|
|
|
|
ражений |
|
|
|
|
|
|
Disp(‘длина |
окружности= |
‘); |
вывод результата |
|
disp(2*pi*r) |
|
|
|
|
|
|
|
|
|
If Условие |
|
Условный оператор |
|
|
Инструкции |
|
|
|
|
End |
|
|
|
|
|
|
|
|
|
If Условие |
|
Условный оператор |
|
|
Инструкции 1 |
|
|
|
|
elseIf Условие |
|
|
|
|
|
Инструкции 2 |
|
|
|
else |
|
|
|
|
End |
Инструкции 3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
If Условие |
|
Условный оператор |
|
|
Инструкции 1 |
|
Инструкции в списке разделяются |
|
|
else |
Инструкции 2 |
|
запятой или точкой с запятой |
|
End |
|
|
|
|
|
|
|
|
|
For var=выражение, |
|
Циклы типа for-end |
|
|
Инструкция,…Инструкция |
Выражение :: s:d:e |
|
||
End |
|
|
s –начальное значение пере- |
|
|
|
|
менной цикла, |
|
|
|
|
d- шаг (если не указан, то d=1), |
|
|
|
|
e – конечное значение переменной |
|
|
|
|
цикла |
|
|
|
|
Пример. |
|
|
|
|
For x=0:0.25:1 x^2, end |
|
|
|
|
|
|
While Условие |
|
Циклы типа While |
|
|
Инструкции |
|
|
|
|
End |
|
|
|
|
128
5.2. Численный анализ моделей элементов биотехнических систем
Для реализации численных методов решения систем дифференциальных уравнений имеется библиотека различных методов, так называемых решателей (solver) [20]. В табл. 5.4 приведены основные решатели и их характеристики, области их применения описаны в табл. 5.5.
|
|
|
|
|
|
|
Таблица 5.4 |
|
N |
|
Решатель |
Характеристики |
|
|
|||
|
|
|
|
|
|
|
|
|
1 |
|
ode45 |
|
Одношаговые явные методы Рунге-Кутта 4-го и 5- |
|
|||
|
|
|
|
|
го порядка. Это классические методы, рекоменду- |
|
||
|
|
|
|
|
ются для начальной пробы решения. |
|
||
|
|
|
|
|
Во многих случаях дают приемлемые (хорошие) |
|
||
|
|
|
|
|
результаты |
|
|
|
2 |
|
ode23 |
|
Одношаговые явные методы Рунге-Кутта 2-го и 4- |
|
|||
|
|
|
|
|
го порядка. При умеренных требованиях к жестко- |
|
||
|
|
|
|
|
сти СОДУ и точности решения этот метод может |
|
||
|
|
|
|
|
дать выигрыш в скорости решения. |
|
||
3 |
|
ode113 |
Многошаговый метод Адамса-Мултона переменно- |
|
||||
|
|
|
|
|
го порядка. Адаптивный метод, который может |
|
||
|
|
|
|
|
дать высокую точность решения. |
|
||
4 |
|
ode23tb |
Неявный метод Рунге-Кутта в начале решения и |
|
||||
|
|
|
|
|
метод, использующий формулы обратного диффе- |
|
||
|
|
|
|
|
ренцирования 2-го порядка в последующем. |
|
||
|
|
|
|
|
|
|
Таблица 5.5 |
|
Решатели |
|
Тип задачи |
Степень |
Область применения |
||||
|
|
|
|
|
|
Точности |
|
|
|
|
|
|
|
|
|||
ode45 |
|
|
Нежесткая |
Средняя |
В большинстве случаев |
|||
ode23 |
|
|
Нежесткая |
Низкая |
При допустимости грубой по- |
|||
|
|
|
|
|
|
|
грешности или при решении |
|
|
|
|
|
|
|
|
умеренно жестких задач |
|
ode113 |
|
|
Нежесткая |
От низкой |
При высокой точности реше- |
|||
|
|
|
|
|
|
до высокой |
ния или при решении сложных |
|
|
|
|
|
|
|
|
в вычислительном отношении |
|
|
|
|
|
|
|
|
задач |
|
ode23tb |
|
|
Жесткая |
Низкая |
При уравнениях, заданных в |
|||
|
|
|
|
|
|
|
неявной форме Коши. |
|
129
Рассмотрим подготовку исходных данных для численного анализа уравнений смесительной модели (3.26), (3.27):
dV |
= G1 +G2 −G3 |
|
и |
V (t) = S H (t); |
(5.1) |
|||||
dt |
|
|
||||||||
|
d(VCA2 ) |
|
|
|
|
|
|
|
|
|
|
|
= G C |
A1 |
−G C |
; |
|
||||
|
|
|
|
|||||||
|
|
dt |
1 |
|
3 |
A2 |
|
|
||
|
|
|
|
|
|
|
|
|
||
|
|
d(VCB2 ) |
= G C |
B1 |
−G C |
. |
|
|||
|
|
|
|
|||||||
|
|
dt |
2 |
|
3 |
B2 |
|
|
||
|
|
|
|
|
|
|
|
|
||
Для обращения к одному из решателей из табл.5.5 необходимо преобразовать уравнения модели в форму Коши:
dY |
= F(Y ,t). |
(5.2) |
dt |
|
|
|
|
Если V=const, то (5.1) преобразуется к виду
dV |
=0 |
|
или |
|
G3 = G1 |
+G2; |
(5.3) |
|||||||||
|
|
|
|
|||||||||||||
|
dt |
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
dCA2 |
= |
|
1 |
|
(G C |
A1 |
−G C |
A2 |
); |
|
|||||
|
|
|
|
|
|
|||||||||||
|
dt |
V |
1 |
|
3 |
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
||||||||
|
dCB2 |
= |
|
1 |
(G C |
B1 |
−G C |
B2 |
). |
|
||||||
|
|
|
|
|
||||||||||||
|
dt |
V |
2 |
|
3 |
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
||||||||
Исходными данными для решения системы (5.3) являются начальные условия Y(t=0) и интервал решения t0 < t ≤ tfinal .
Обращение к решателю имеет вид
[T,Y]=solver(‘F’,[t0 tfinal],y0). |
(5.4) |
С учетом (5.2) и (5.3) вектор имеет две составляющие: |
(5.5) |
Y = ( y1, y2 ) и y1 = CA2 , y2 = CB2. |
В этой функции (5.4) кроме начальных условий и интервала для изменения независимого аргумента указывается имя (‘F’) так называемого ODE-файла, в котором описывается правая часть исходной системы дифференциальных уравнений.
С учетом (5.5) ODE-файл с описанием правой части системы (5.3) имеет вид
function dydt = vdp25(t,y)
%смесительная модель при постоянном объеме
%исходные данные
G1=1;
G2=3;
130
CA1=15;
CB1=10;
W=1/V;
G3= G1+ G2;
% правая часть системы дифференциальных уравнений в форме Коши
dydt = [W*(G1*CA1-G3*y(1)); W*(G2*CB1-G3*y(2))];
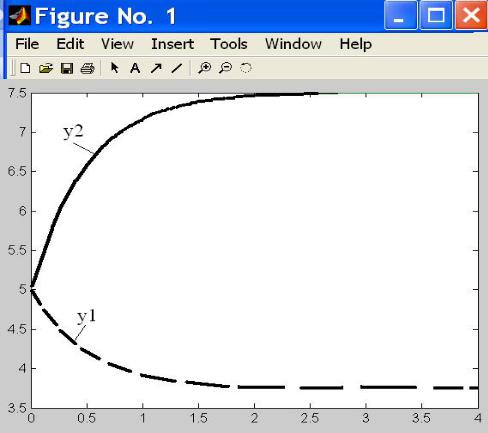
Сохраняем функцию vdp25(t,y) в файле vdp25.m. Используя командное окно, получаем решение (табл.5.6).
|
Таблица 5.6. |
Команды |
Результат |
|
|
>> [t,y]=ode45(@vdp25,[0 4],[5 5]); |
На экран выводятся графики- |
>> plot(t,y); |
решения (рис.5.10). |
>>hold on; |
Дополнение графиков метками (в |
gtext('y1'),gtext('y2'),gtext('y3') |
ручном режиме) |
Рис.5.10. Изменение концентраций в смесительной модели при постоянном объеме(5.3)
131
Для численного анализа полной смесительной модели (5.1) введем обозначения
|
y1(ti ) = S H (ti ) CA2 (ti ); |
|
|
|
(5.6) |
|||||||||||||||
|
y2 (ti ) = S H (ti ) CВ2 (ti ); |
|
|
|
|
|||||||||||||||
|
|
|
y3 (ti ) = S H (ti ). |
|
|
|
|
|
|
|
||||||||||
Тогда система (5.1) примет вид |
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
dy1 |
|
|
= G +G −G ; |
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
dt |
|
1 |
|
2 |
3 |
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(5.7) |
||||
|
|
d( y2 ) |
= G C |
A1 |
−G C |
A2 |
; |
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
dt |
|
|
|
1 |
|
3 |
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
d( y3 ) |
= G C |
B1 |
−G C |
B2 |
; |
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|||||||||||||
|
|
dt |
|
|
|
2 |
|
3 |
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
CA2 |
(ti ) = |
y2 (ti ) |
|
и |
CB2 |
(ti ) = |
|
y3 (ti ) |
. |
|
||||||||||
|
|
|
|
|||||||||||||||||
|
|
|
|
y (t |
) |
|
|
|
|
|
|
|
y |
(t |
) |
|
|
|||
|
1 |
i |
|
|
|
|
|
|
|
|
1 |
i |
|
|
|
|||||
С учетом (5.7) вектор Y имеет три составляющие: |
|
|||||||||||||||||||
Y = ( y1, y2, y3 ) |
и y1 =V , |
y2 = (CA2 y1 ), y3 = (CB 2 y1 ) |
(5.8) |
|||||||||||||||||
Тогда ODE-файл с описанием правой части системы (5.7),(5.8) имеет
вид
function dydt = vdp26(t,y)
G1=1.5;
G2=2;
G3=3.5;
%Значения концентрации при статическом равновесии CA1=20 и
CB1=15
%Имитация возмущений по концентрации входных потоков
CA1=40 и CB1=45
CA1=20;
CB1=15;
%правая часть системы дифференциальных уравнений в форме Коши
dydt = [(G1+G2-G3); (G1*CA1-G3*(y(2)/y(1)));
(G2*CB1-G3*(y(3)/y(1)))];
Сохраняем функцию vdp26(t,y) в файле vdp26.m. С помощью этой
132
функции мы получаем массив значений только одной искомой координаты смесительной модели V(t), для определения концентраций смешиваемых веществ необходим пересчет массивов y(i,2) и y(i,3) по соотношениям, получаемым из (5.8):
CA2 (ti ) = |
y2 (ti ) |
, |
CB2 (ti ) = |
y3 (ti ) |
. |
(5.9) |
y1(ti ) |
|
|
||||
|
|
|
y1(ti ) |
|
||
Эти команды, как и обращение к решателю, оформим в виде файласценария vdp28.m.
%Смеситель
%Расчет концентраций
%задание начальных условий y1, y2, y3
A=[3,25.71429,25.71429];
%обращение к решателю, интервал времени от 0 до 5, нач.усл=А
[t,y]=ode45(@vdp26,[0 5],[A]);
%Определение числа шагов по оси времени
K=size(t);
N=K(1,1);
% Расчет массива концентраций по (5.9)
for i=1:N CA2(i,1)=y(i,2)/y(i,1), CB2(i,1)=y(i,3)/y(i,1),end;
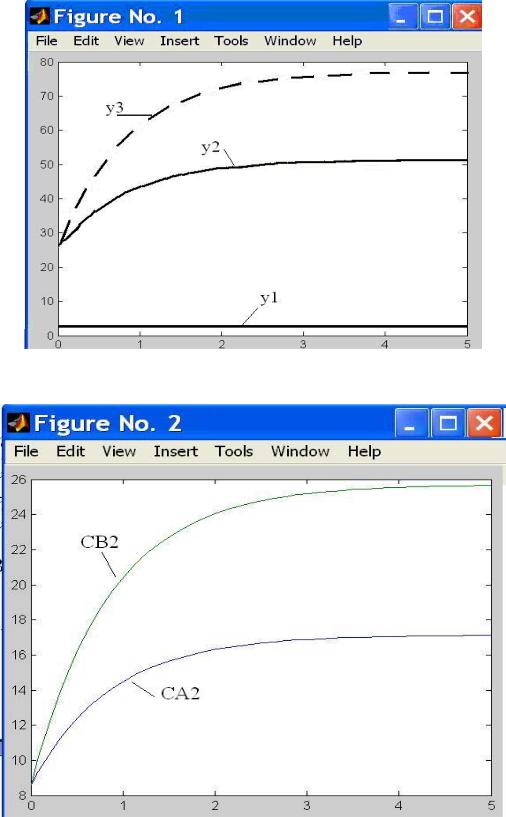
% Вывод графиков y(t) и CA2(t) CB2(t) plot (t,y);
figure;
plot(t,CA2,t,CB2);
В результате выполнения файла vdp28.m получаем графики (рис.5.11, 5.12).
Рассмотренные примеры реализации смесительной модели позволяют построить программу численного анализа модели процесса газообмена в дыхательной системе.
Программная реализация решения системы (3.29) – (3.30) уравнений материального баланса по углекислоте для легочного и тканевого резервуаров аналогична смесительной модели с постоянным объемом. Обозначим y(1) = Са, концентрации углекислоты в альвеолярном резервуаре, y(2) = Сt, концентрации углекислоты в тканевом резервуаре.
133
Рис.5.11. Изменение составляющих вектора Y в модели (5.7) при возмущениях по концентрациям во входных потоках
Рис.5.12. Изменение концентраций в смесительной модели при возмущениях по концентрациям во входных потоках
134
Тогда ODE-файл с описанием правой части системы (3.30) примет вид function dydt = vdp2(t,y)
%Задаются значения исходных данных
%G1 (воздушный поток на вдохе и выдохе)
%Q1, Q2 потоки венозной и артериальной крови,
%W скорость образования углекислоты в процессе обмена
%С1 - концентрация углекислоты во вдыхаемом воздухе,
%Va, Vt – соответственно объемы альвеолярного и тканевого ре-
зервуаров
%b0 ,b1 - коэффициенты линеаризующей функции F(CA ) = b0 + b1CA .
………………………………………………..
% правая часть системы модели дыхания
dydt = [(G1*C1+ Q1*y(2)-Q2*(b0+b1*y(1))-G1*y(1))/V; (W+Q2*(b0+b1*y(1))-Q1*y(2))/V];
На основе обращений к решателям (табл.5.4) можно построить программы анализа динамических моделей объектов с сосредоточенными координатами.
При рассмотрении моделей, заданных передаточными функциями, удобнее использовать возможности пакета расширения Simulink [20].
Контрольные вопросы
10.Назначение программной системы MATLAB.
11.Основные режимы работы системы
12.Какие средства системы можно использовать для просмотра результатов вычислений?
13.Для чего предназначено окно Workspace Browser ? 14.Чем файлы-функции отличаются от файлов-сценариев ?
15.Какие редакторы можно использовать для создания М-файлов ? 16.Для чего используются решатели (solver`s) ?
17.Приведите примеры решателей, которые включены в библиотеку
MATLAB.
135
18.Какие исходные данные необходимы для численного анализа уравнений упрощенной математической модели процесса газообмена в дыхательной системе:
d(VАCA ) |
= G C +Q C −Q F(C ) −G C ; |
(5.10) |
|||||||||||
dt |
|||||||||||||
1 1 |
1 t |
2 |
|
A |
|
1 |
A |
||||||
|
|
|
|
|
|||||||||
|
d(Vt Ct ) |
=W +Q F(C |
A |
) −Q C |
; |
|
|
||||||
|
|
|
|
||||||||||
|
dt |
2 |
|
|
|
1 t |
|
|
|
||||
|
VA ,Vt |
= const. |
|
|
|
|
|
||||||
|
|
При |
|
|
|
|
|
||||||
19.Составьте ODE-файл с описанием правой части системы (5.10).
20.Какие исходные данные необходимы для численного анализа уравнений компартментной системы движения йода в организме млекопитающего
|
|
|
dV1 |
|
|
= r |
+ r |
|
+ r |
− r |
|
−V |
V |
|
(u |
H |
2 |
− S H |
|
|
|
+ z); |
|
|
(5.11) |
||||||||||||||||||||||
|
|
|
|
|
|
|
|
4 |
4 |
|
|
||||||||||||||||||||||||||||||||||||
|
|
|
dt |
|
21 |
31 |
|
61 |
17 |
|
|
1 |
5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
dV2 |
=V |
V |
(u H 2 − S H |
4 |
+ z) + r |
− r |
|
−V |
|
V |
|
Q ; |
|
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||
|
|
|
dt |
|
1 |
5 |
|
|
|
4 |
|
|
|
|
|
|
|
|
|
|
|
32 |
|
|
21 |
|
|
|
2 |
5 |
|
|
|
2 |
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
dV3 |
=V |
V |
Q |
− r |
− r |
−V |
|
S |
(AH |
4 |
+ r ); |
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||
|
|
|
dt |
|
2 |
5 |
|
2 |
|
32 |
|
31 |
|
3 |
|
|
3 |
|
|
|
|
|
|
37 |
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
r31H3 |
|
H1r17 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
dH1 |
= |
r21H2 |
+ |
− |
− H V |
(u H 2 − S H |
4 |
+ z); |
|
|
|
||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||
dt |
|
|
|
|
|
|
V2 |
|
|
V3 |
|
|
V1 |
|
|
|
1 |
|
5 |
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
dH2 |
= H V (u H |
2 − S |
H |
4 |
+ z) + |
r32 H3 |
− |
H2 r21 |
− H |
2 |
V |
Q |
; |
||||||||||||||||||||||||||||||||||
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||
dt |
|
|
|
|
|
|
|
1 |
5 |
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
|
V3 |
|
|
|
|
|
V2 |
|
|
|
|
|
|
|
5 |
2 |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
dH3 |
= H |
2 |
V |
Q |
− |
H3 |
(r |
|
+ r ) − S |
3 |
H |
3 |
(AH |
4 |
+ r ), |
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||
dt |
|
|
|
|
|
|
|
5 |
|
|
2 |
|
V3 |
32 |
31 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
37 |
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
при V5 |
= const и H4 |
|
= const. |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
21.Составьте ODE-файл с описанием правой части системы (5.11).