

7.4. Возведение земляных сооружений экскаватором
Экскаватором разрабатывают котлованы, траншеи.
Экскаваторы различают:
– по базе экскаватора – гусеничные (рис. 7.3);

Рис. 7.3. Тип ходовой части экскаваторов – гусеничный ход
– пнёвмоколесные, на базе трактора, на автомобильном ходу (рис. 7.4);

Рис. 7.4. Тип ходовой части экскаваторов – пневмоколесный ход
– по количеству ковшей – одноковшовые циклического действия, основной тип в современном промышленном и гражданском строительстве (ПГС) (рис. 7.6, 7.7);

Рис. 7.5. Гусеничный экскаватор – драглайн
– многоковшовые (цепные и роторные) непрерывного действия только для устройства траншей, эффективны при большом объеме таких работ;
– по объему ковша – 0,5…2,0 м3 (для объектов ПГС);
– по виду рабочего органа;
– прямая лопата (рис. 7.6);

Рис. 7.6. Гусеничный экскаватор – прямая лопата
– обратная лопата (рис. 7.7);

Рис. 7.7. Гусеничный экскаватор – обратная лопата
– драглайн (рис. 7.5), грейфер.
Для рациональной организации процесса в зависимости от вида сооружения, рода грунта, способа отгрузки (в самосвал или в отвал) подбирают конкретный тип экскаватора по его технологическим параметрам.
Эффективные области их применения следующие:
– прямая лопата – разработка сухих грунтов выше уровня стоянки с погрузкой в транспорт;
– обратная лопата – разработка сухих и влажных грунтов ниже уровня стоянки с отсыпкой в отвал;
– драглайн – разработка влажных и мокрых грунтов значительно ниже уровня стоянки (глубоких выемок) с отсыпкой в отвал;
– грейфер – разработка слабых грунтов (песок), разрыхленных, мокрых, в т.ч. под водой грунтов ниже уровня стоянки (глубокие выемки) с отсыпкой в отвал.
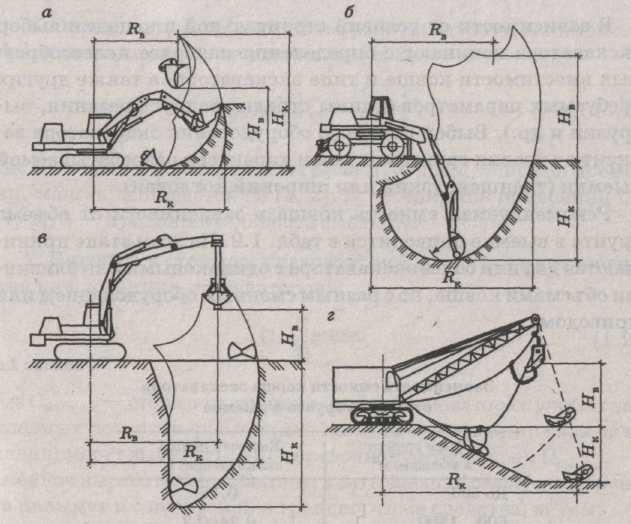
Рис. 7.8. Профили забоя экскаватора с различным рабочим оборудованием: а – прямая лопата с канатным управлением рабочим органом; б – обратная лопата; в – драглайн; г – грейфер

Рис. 7.9. Схема работы многоковшовых экскаваторов: а – экскаватор с ковшовой цепью; б – роторный экскаватор; в , г , д. – профили траншей, разрабатываемых многоковшовым экскаватором

Рис. 7.10. Основные технологические параметры экскаватора:
R1 – максимальный радиус резания; Н2 – максимальная глубина резания; Н1 – максимальная высота резания; R4 – максимальный радиус выгрузки; Н4 – высота выгрузки при R4; Н5 – максимальная высота выгрузки; R3 – радиус выгрузки при Н5; R6 – минимальный радиус резания

Рис. 7.11. Схемы экскаваторных проходок с рабочим оборудованием «прямая лопата»: а – лобовая (торцовая) проходка; б – то же, с двухсторонним расположением транспорта; в – уширенная лобовая проходка с движением экскаватора «зигзаг»; г – поперечно-торцовая проходка; д – боковая проходка; е – разработка котлована по ярусам; I, II, III – яруса разработки: 1 – экскаватор; 2 – автосамосвал; 3 – направление движения
Количество ярусов зависит от глубины котлована, количество и ширина проходок определяется размерами котлована и типом техники (экскаватор, самосвалы). В зависимости от этого определяется также и схема организации работ, т. е. вид забоя. Принимают лобовой забой (сокращенный, нормальный, уширенный) или боковой забой, как наиболее эффективный. При больших котлованах разработку первой (иногда второй) проходки ведут лобовым забоем, а затем используют боковой забой.
Для бесперебойной работы комплекта «экскаватор + самосвалы» необходима четкая организация процесса во времени, чтобы исключить взаимные простои техники. Во-первых, под ведущий механизм (экскаватор) подбирают параметры самосвала; при этом в кузов самосвала должно входить 3…7 ковша экскаватора. Количество самосвалов определяют расчетом в зависимости от производительности экскаватора, объема кузова самосвала, дальности возки, вида дорог.
Разработка котлованов ведется последовательными этапами, разработкой ярусов, а внутри их разработкой проходок.