

А. В. Корляков
МЕТОД АНАЛОГИЙ ПРИ АНАЛИЗЕ И ПРОЕКТИРОВАНИИ МИКРОСИСТЕМ
Введение
В процессе развития микросистемной техники элементы микросистем в основном были представлены различными сенсорами, и целевые функции даже более сложных микросистем также носили диагностический или измерительный характер. Сложилось представление о микросистемах как о совокупности сенсоров, процессоров и актюаторов, реализованных в микроустройстве[1], отражающее в большей степени иерархический аспект их структуры.
Современные микросистемы включают в себя(кроме сенсорных и актюаторных структур) элементы транспортировки (проводники, микроканалы, микромеханические передачи), элементы накопления и хранения (конденсаторы, индуктивности, микропружины, микрорезервуары, теплоемкости), преобразователи энергии и сигнала, причем не только электрической природы (термомеханические, акустомеханические, термохимические). Сложные аналитические и технологические микросистемы включают множество функциональных узлов и преобразователей различных видов энергии. По физической природе функционирования и преобразования энергии микросистемы можно разделить на:
–микромеханические, электромеханические;
–пневмо-, акустомеханические;
–термоэлектромеханические;
–оптоэлектромеханические;
–микрофлюидные;
–химико-биологические и т. д.
Малые размеры базовых конструктивных элементов и открытость внешним воздействиям (особенно в сенсорах) определяют важную особенность микросистем, связанную со значительным влиянием внешних физических факторов на их функциональные свойства. Полнофункциональный анализ таких микросистем с критическими параметрами и размерами элементов невозможен без учета взаимовлияния
141

подсистем различной физической природы. При проектировании и анализе работы элементов микросистем часто приходится учитывать воздействия различной энергетической природы (электрические, механические, тепловые, звуковые и др.). В этом аспекте современные микросистемы представляют собой сложную совокупность взаимодействующих элементов различной физической природы.
Таким образом, наряду с системной интеграцией в микрообъеме элементов различного функционального назначения очевидна и конст- рукторско-технологическая интеграция элементов и систем различной физической природы, активно взаимодействующих на микроуровне.
Развитие микросистемной техники через расширение номенклатуры используемых физических принципов и их интеграции в элементах на микроуровне, взаимовлияние сил и потоков различной физической природы на открытые элементы микросистем требует обобщенного подхода к анализу, расчету и проектированию микросистем различной физической природы.
Описание систем в обобщенных параметрах
Существует общность уравнений, описывающих системы различной физической природы в рамках различных систем аналогий[2].
В микросистемной технике при расчете и анализе работы сложных систем часто применяются электромеханические[3], электротепловые [4]–[6] и электроакустические [7] аналогии. Некоторые обобщения этого подхода представлены в [8], [9].
Феноменологический подход к этому вопросу заключается в описании систем через обобщенные физические параметры [10], в частности:
–через обобщенные координаты qi;
–через обобщенные сопряженные импульсы pi;
–через обобщенные скорости
vi = qi = ¶H ¶pi ; |
(1) |
& |
|
– через обобщенные силы |
|
Fi = pi = -¶H ¶qi , |
(2) |
& |
|
где H – гамильтониан системы, равный полной энергии (кинетической и потенциальной). Обобщенный сопряженный импульс pi определяется
142

через производную по соответствующей обобщенной скоростиvi от кинетической энергии. В дифференциальной форме, в соответствии с выражениями (1) и (2), гамильтониан системы выражается как
dH = å(-F dq + v dp )+ |
¶H |
dt . |
(3) |
|
|
||||
i i |
i i |
¶t |
|
|
i |
|
|
||
В соответствии с этим выражением, в сумме могут быть представлены параметры систем различной физической природы, определяемые выбором обобщенных координат (степеней свободы), например:
dH = – Fdr + vdp – Mdα + ωdY – PdV + TdS, (4)
где F, r, v, p – параметры механического поступательного движения, соответственно: сила, перемещение, скорость, импульс; M, α, ω, Y – параметры механического вращения, соответственно: момент силы, угол поворота, угловая скорость, момент импульса; P, V – акустические (пневматические) параметры: давление и объем; T, S – тепловые параметры: температура и энтропия системы.
В выражениях (3) и (4) выделяются потенциальные и кинетические составляющие полного дифференциала энергии. Между ними существует определенная аналогия. По существу, обобщенные координаты и обобщенные импульсы являются обобщенными степенями свободы ai (параметрами системы) для гамильтониана в рамках фазового пространства (qi, pi), а обобщенные силы и обобщенные скорости(–Fi, vi) – соответствующими обобщенными потенциалами Ai системы в со-
ответствии с (1) и (2):
Ai = ¶H ¶ai . |
(5) |
Также можно определить и следующие обобщенные параметры:
–обобщенная гибкость (емкость) Ci = dqi /dFi;
–обобщенная масса (индуктивность) mi = dpi /dvi;
–обобщенное сопротивление Ri = dFi /dvi;
–обобщенная проводимость 1/Ri = dvi /dFi.
Построенная таким образом аналогия между различными физическими явлениями основана не просто на формальной схожести уравнений, а на представлении об обобщенных параметрах и потенциалах
143
системы (5), вытекающих из вариационных принципов[11]. Системы аналогий на основе обобщенных параметров для различных физических явлений представлены в табл. 1 и 2.
Как видно из таблиц, многие физические явления представлены потенциальной и кинетической аналогией, причем для электростатики магнетизм представляется как кинетическая аналогия. На этом основаны известные электромеханические аналогии, где масса и упругость аналогичны, соответственно, индуктивности и емкости. У тепловых и диффузионных процессов есть только потенциальная часть. Для тепловых процессов в качестве параметра системы(обобщенной координаты) используется энтропия (в отличие от известных электротепловых аналогий, где в качестве такого параметра обычно выступает количество тепла). Это пример того, что обобщенные параметры системы не всегда строго соответству-
ют общепринятым параметрами в специальных областях технических дисциплин. Похожая ситуация создалась и с элементами магнитостатики, где аналогом импульса выступает магнитный поток.
Представленные аналогии не всегда привычны для узких специалистов, но лучше описывают сложные процессы, протекающие во взаимодействии систем различной физической природы, так как основаны на общих принципах сохранения энергии(3), определения мощности (Вт) в произведении обобщенных сил и скоростей и размерности действия (Дж·с) в произведении обобщенных импульсов и координат.
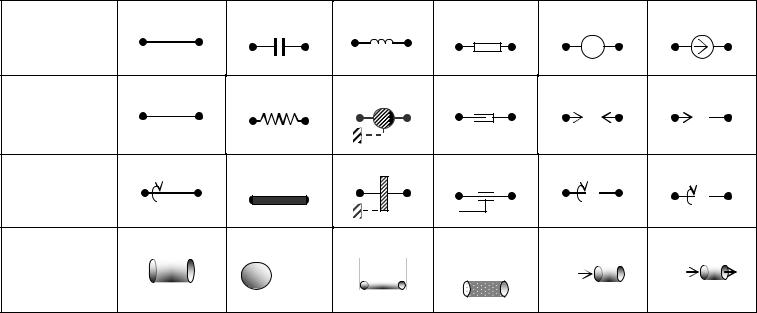
В рамках каждого вида физической системы (механическая, электрическая и т. д.) можно выделить пассивные идеальные элементы: диссипативного типа (сопротивление, проводимость); емкостного типа (упругость, теплоемкость); индуктивного типа (масса, момент инерции, индуктивность). Идеальные элементы характеризуют определенные фундаментальные свойства физических систем и с некоторыми допущениями могут быть соотнесены с конкретными конструктивными элементами технической системы. Их схематичное изображение и физические аналогии представлены в табл. 3. Наряду с пассивными элементами систем используют идеальные проводники и идеальные источники обобщенных сил и потоков [12]. Таким образом, техническая система одной физической природы может быть схематично представ-
144
|
|
Система аналогий потенциальных параметров различных физических систем |
Таблица 1 |
|||||||
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
Вид |
Обобщенный |
Потенциал |
|
|
Скорость |
Обобщенная |
|
Обобщенное |
Потенциальная |
|
параметр |
(обобщенная |
изменения пара- |
емкость |
сопротивление |
энергия |
||||
|
энергии |
|||||||||
|
q |
сила) F(∆F) |
|
метра v = dq/dt |
C = dq/dF |
|
R = dF/dv |
U = ∫Fdq |
||
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
Механическое |
Абс. смещение, |
Механическая |
|
|
Скорость |
Гибкость |
Механическое |
Упругая |
|
|
поступательное |
деформация |
сила |
|
|
сопротивление |
энергия |
|||
|
|
|
υ = dr/dt [м/с] |
1/ k = dr/dF [м/Н] |
||||||
|
движение |
r (x, y, z) [м] |
F [Н] |
|
|
Rм = dF/dv [Нс/м] |
kr2/ 2 [Дж] |
|||
|
|
|
|
|
||||||
|
Механическое |
Угол |
Момент силы |
Угловая скорость |
Податливость |
Сопротивление |
Упругая энергия |
|||
|
поворота |
кручению |
|
кручению |
кручения |
|||||
|
вращение |
М = [rF] [Нм] |
|
|
ω = dα/dt [1/с] |
|
||||
|
α |
|
|
1/g = dα/dM [1/Нм] |
Rω = dM/dω [Нмс] |
gα2 / 2 [Дж] |
||||
|
|
|
|
|
|
|||||
|
|
|
|
Скорость объемного |
Сжимаемость* газов |
Сопротивление |
Энергия |
|||
|
Акустика, |
Объем |
Давление |
|
протекания |
|||||
|
|
|
расширения |
3 |
|
изотермического |
||||
|
гидростатика |
V [м3] |
P [Па] |
|
|
|
Rр = dP/dJV |
сжатия газа |
||
|
|
|
3 |
–V/P [м /Па]; |
|
|||||
145 |
|
|
|
|
JV = dV/dt [м /с] |
жидкостей ≈ 0 |
|
[Па·с/м3] |
PV·ln(P2/P1) [Дж] |
|
|
Электрический |
Электрический |
|
Электрический |
Электрическая |
Электрическое |
Электрическая |
|||
|
|
|
||||||||
|
Электростатика |
заряд |
потенциал |
|
|
ток |
емкость |
сопротивление |
энергия |
|
|
|
q [Кл] |
φ [В] |
|
|
J [А] |
C = dq/dφ [Кл/В] |
R = dφ/dJ [Ом] |
Cφ2/2 [Дж] |
|
|
Электрическая |
Дипольный |
Напряженность |
|
|
Скорость эл. |
Поляризуемость |
Сопротивление |
Энергия |
|
|
эл. момент |
эл. поля |
|
|
поляризации |
dpe/dE = æε0V |
|
поляризации |
эл. диполя |
|
|
поляризация |
|
|
|
||||||
|
pe = ql [Кл м] |
E [В/м] |
|
Jp = qdl/dt [А·м] |
[Кл·м2/В] |
dE/dJp [Ом/м2] |
peE [Дж] |
|||
|
Тепловые |
Энтропия |
Температура |
|
|
Скорость |
Энтропийная |
Тепловое (энтроп.) |
Тепловая энергия |
|
|
изменения энтропии |
(тепло) емкость |
сопротивление |
|||||||
|
системы |
S [Дж/К] |
T [К] |
J |
S |
= dS/dt [Дж/Кс] |
C = dS/dT [Дж/К2] |
R |
= dT/dJ [К2/Вт] |
Q = ∫TdS [Дж] |
|
|
|
|
|
|
S |
T |
S |
|
|
|
Химические |
Число частиц |
Химический |
|
|
Скорость |
Адсорбционная |
Сопротивление |
Химическая |
|
|
реакции, |
потенциал |
|
|
реакции |
емкость |
диффузионное |
энергия |
||
|
N |
|
|
|||||||
|
диффузия |
μ [Дж] |
|
JN = dN/dt [1/с] |
dN/dμ [Дж–1] |
|
μ / JN [Джс] |
∫μ dN [Дж] |
||
|
|
|
|
|||||||
|
Поверхностное |
Площадь |
Сила поверхн. |
|
|
Скорость |
Податливость |
Сопротивление |
Поверхностная |
|
|
поверхности |
натяжения |
увелич. площади |
растяжению |
|
растяжению |
энергия |
|||
|
натяжение |
|
||||||||
|
s [м2] |
T [Н/м] |
|
|
ds/dt [м2/с] |
ds/dT [м3/Н] |
T /(ds/dt) [Нс/м3] |
∫T ds [Дж] |
||
|
|
|
|
|||||||
|
|
Система аналогий кинетических параметров различных физических систем |
Таблица 2 |
||||||
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
Потенциал |
Скорость |
Обобщенная |
Обобщенная |
Кинетическая |
||
|
|
Обобщенный |
изменения пара- |
||||||
|
Вид энергии |
(Об. скорость) |
индуктивность |
проводимость |
энергия |
||||
|
параметр p |
метра (Об. сила) |
|||||||
|
|
Υ |
L = dp/dv |
1/R = dv/dF |
K = ∫v·dp |
||||
|
|
|
F = dp/dt |
||||||
|
|
|
|
|
|
|
|
|
|
|
Механическое |
|
|
Мех. сила |
Инерционная |
Механическая |
Кинетическая |
||
|
Импульс |
Скорость |
(инерции) |
проводимость |
энергия |
||||
|
поступательное |
масса |
|||||||
|
p = mv [Нс] |
v [м/с] |
F = dp/dt = ma |
1/R |
м |
= dv/dF |
движения |
||
|
движение |
m = dp/dv [кг] |
|||||||
|
|
|
[Н] |
|
|
mv2/ 2 [Дж] |
|||
|
|
|
|
|
[м/Нс] |
||||
|
|
Момент |
Угловая |
Момент силы |
|
Проводимость |
Кинетическая |
||
|
Механическое |
импульса |
(инерции) |
Момент инерции |
кручения |
энергия |
|||
|
скорость |
||||||||
|
вращение |
Y = [r·p] = Iω |
М = dY/dt = Iε |
I = dY/dω [кг м2] |
1/Rω = dω/dM |
вращения |
|||
|
ω [1/с] |
||||||||
146 |
|
[Нмс] |
[Нм] |
|
[1/Нмс] |
Iω2/ 2 [Дж] |
|||
|
|
|
|||||||
|
|
Поверхностная |
Объемный |
|
Инерционность |
Проводимость |
Кинетическая |
||
|
Газо- |
плотность |
Давление |
||||||
|
поток |
потока |
протекания |
энергия тече- |
|||||
|
и гидро- |
импульса |
(ударное) |
||||||
|
JV = dV/dt = s·v |
m/s2 = ρl/s |
1/RP = dJV /dP |
ния |
|||||
|
динамика |
p/s = ρlv |
P = d(p/s)/dt [Па] |
||||||
|
[м3/с] |
[кг/м4] |
[м3/сПа] |
ρl(JV)2/ 2s [Дж] |
|||||
|
|
[Hc/м2] |
|
||||||
|
Магнитные |
Магнитный |
Магнито- |
ЭДС |
Индуктивность |
Электрическая |
Магнитная |
||
|
поток |
движущая сила |
самоиндукции |
проводимость |
энергия |
||||
|
явления |
L = dФ/dJ [Гн] |
|||||||
|
Ф = Bs [Вс] |
nJ [А] |
φ = dФ/dt [В] |
1/R = dJ/dφ [См] |
LJ2/ 2 [Дж] |
||||
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
146
|
Примеры схем-аналогов идеальных элементов различных физических систем |
Таблица 3 |
||||
|
|
|||||
|
проводник |
C |
L |
R |
U |
J |
|
Электрическая |
|
|
|
~ |
|
|
|
|
|
|
|
|
|
Механическая |
1/k |
m |
Rm |
F |
v |
|
поступательная |
|
|
|
||
|
|
|
|
|
|
|
147 |
Механическая |
1/g |
J |
Rω |
M |
ω |
вращательная |
|
|
|
|||
|
|
|
|
|
|
|
|
Акустическая |
V/P |
ma |
Ra |
∆P |
JV |
147

лена в виде совокупности идеальных элементов, соединенных определенным образом в соответствии с особенностями их взаимодействия. Такая схема (рис. 1) отражает структурные и функциональные свойства технической системы и эквивалентна системе дифференциальных уравнений, описывающих ее работу.
k |
|
|
x |
|
|
|
k |
|
m |
m |
|
|
|
x |
ύ |
a |
R |
m |
Rm |
|
|
||
|
а |
|
б |
Рис. 1. Пример механической системы маятника на пружине под действием внешнего ускорения: а – схема конструкции; б – механическая схема системы
С учетом аналогий (табл. 3) схемы различных по физическим принципам работы технических систем часто отображают в виде электрических схем-аналогов. Это обусловлено как личными пристрастиями разработчиков, так и развитостью методов и программ анализа электрических схем. При этом преобразование механических схем в электрические схе- мы-аналоги происходит с учетом инверсии цепи (рис. 2). Это связано с тем, что в механических цепях при параллельном соединении суммируются силы, а в электрических цепях суммируются токи. Схемы исторически отражают прообразы реальных конструкций элементов.
F |
|
|
F |
|
F |
|
C1 |
|
|
|
|
|
|
|
|
C1 |
|
C1 |
|
|
m1 |
|
|
|
|
||
|
|
|
|
L1 (m1 ) |
||
Г1 |
C2 |
|
C2 m1 |
R (Г |
||
Г1 |
) |
C2 |
||||
m2 |
|
|
|
1 |
|
|
|
|
|
|
|
|
|
C3 |
m |
C |
|
|
C3 |
|
|
|
2 |
L2 (m2 ) |
|
||
|
|
|
3 |
|
||
|
|
|
|
|
|
|
а |
б |
в |
|
Рис. 2. Этапы построение электрической схемы-аналога: |
|
а – механическая схема; б – инверсия цепи; в – электрическая схема-аналог
148