

Запись уравнений переменных состояния по дсс.
Если не требуется получения специальных (канонических) форм, то проще всего это сделать по методике:
Выбрать в качестве переменных состояния, выходные переменные всех интегрирующих звеньев.
По схеме записать уравнения состояния:
![]() ,
,![]() .
.
Для этого звено

удобно рассматривать как
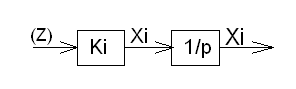
тогда
![]() ,
где
,
где![]() должна быть выражена через
должна быть выражена через![]() и
и![]() .
.
По схеме записать уравнения выхода:
![]()
![]()
По уравнениям записать матрицы
 и уравнения вида:
и уравнения вида: ,
, .
.
Замечание: Если схема не является ДСС то удобно воспользоваться УКФ (смотри далее).
§17. Линеаризация уравнений динамических систем.
Линеаризация – замена не линейной математической модели приближенной линейной моделью, которая при определенных условиях эквивалентна исходной модели.
Линеаризация функции одной переменной(линеаризация не линейной статической характеристики).
Пусть звено описывается уравнением
![]() (17.1)
(17.1)
Где
![]() вход;
вход;![]() выход.
выход.
Пусть в установившемся режиме
![]() .
.
В переходном процессе
![]() и
и![]() отличаются от
отличаются от![]() и
и![]() ,
т.е. возникают отклонения
,
т.е. возникают отклонения (17.2)
(17.2)

![]() точка
линеаризации.
точка
линеаризации.
Задача линеаризации уравнения (17.1) в
малой окрестности
![]() состоит в приближенной замене (17.1)
линейным уравнением записанным для
отклонений
состоит в приближенной замене (17.1)
линейным уравнением записанным для
отклонений![]() и
и![]() .
.
![]() (17.3)
(17.3)
Чтобы найти коэффициент линеаризации
![]() разложим функцию
разложим функцию![]() в ряд Тейлора в окрестности точки
в ряд Тейлора в окрестности точки![]() ,
считая, что
,
считая, что![]() имеет в этой точке необходимое число
производных.
имеет в этой точке необходимое число
производных.
![]() (17.4)
(17.4)
где, например,
![]()
Считая отклонения
![]() малыми, удержим в (17.4) только члены
содержащие
малыми, удержим в (17.4) только члены
содержащие![]() в степени не больше первой.
в степени не больше первой.
![]() (17.5)
(17.5)
Вычтем из уравнения (17.5) уравнение статики
![]() (17.6)
(17.6)
Тогда с учётом (17.2) получаем
![]() (17.7)
(17.7)
Из сравнения (17.7) и (17.3) находим
![]() (17.8)
(17.8)
Геометрически коэффициент линеаризации
есть
![]() угла
наклона касательной к графику функции
в точке линеаризации.
угла
наклона касательной к графику функции
в точке линеаризации.
Особенности уравнения (17.7) или (17.3).
В отличие от уравнения (17.7) оно записано не для самих переменных, а для их отклонений.
Относительно отклонений оно линейно.
оно является приближенным, т.к. были отброшены члены высших порядков малости в разложенном ряде Тейлора.
Замечания:
Метод справедлив только при малости отклонений.
Не могут быть линеаризованы функции имеющие разрывы.
Обычно не линеаризуются гладкие функции (имеющие разрывы производных).
Линеаризация функции нескольких переменных.
Пусть функция
![]() (17.9)
(17.9)
дифференцируема в окрестности
![]() по каждому аргументу.
по каждому аргументу.
Разложим в ряд Тейлора и отбросим члены высших порядков малости.
![]() (17.10)
(17.10)
где
![]()
Вычитая уравнение статики
![]() (17.11)
(17.11)
получаем с учетом обозначений
![]() ,
,![]() ;
;![]()
![]() (17.12)
(17.12)
где коэффициент линеаризации
![]() .
.
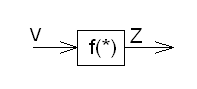
Уравнениям (17.9) и (17.12) соответствуют схемы:

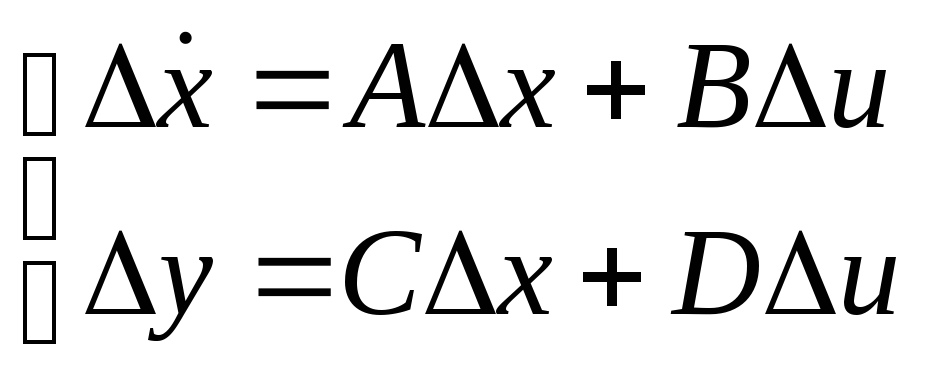
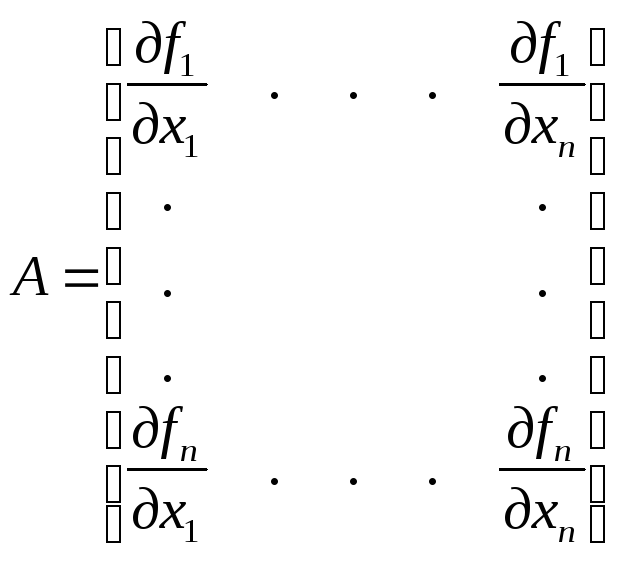
Линеаризация уравнений в переменных состояния.
![]()
![]() (17.13)
(17.13)
![]()
![]() (17.14)
(17.14)
Разложим
![]() и
и![]() в ряд Тейлора в окрестности точки
в ряд Тейлора в окрестности точки![]() и отбросим
и отбросим
 (17.15)
(17.15)
 (17.16)
(17.16)
Вычтем из уравнения (17.15) и (17.16) уравнения статики
![]()
![]()
![]()
![]()
с учетом обозначений
![]() ;
;![]() ;
;![]() ;
;![]() ,
получаем
,
получаем


В векторной форме


Практические способы линеаризации.
Описанная выше процедура с разложением в ряд Тейлора, на примере функции
 .
.
Представляем все переменные как
![]() ;
;
![]()
Выполняем все действия предусмотренные в
 .
.Вычитаем уравнение статики.
Самый короткий.
Записываем полный дифференциал.
![]()
Заменяем
![]()
![]()
![]()
Пример 17.1.
![]()
![]()
![]() .
.
![]()
![]()

![]()
![]()