§11. Определение фазы по лах минимально-фазовой системы.
Теоретически связь между ЛАХ и ЛФХ выражается формулой:
![]() (11.1)
(11.1)
где
![]() ;
;![]() вспомогательная
переменная (круговая частота).
вспомогательная
переменная (круговая частота).
Согласно (11.1)
![]() есть взвешенная сумма коэффициентов
наклона ЛАХ, причём роль весового
множителя выполняет функция
есть взвешенная сумма коэффициентов
наклона ЛАХ, причём роль весового
множителя выполняет функция![]() .
.
Из формулы (11.1) и графика следует, что
на значение ЛФХ на данной частоте
![]() наибольшее влияние оказывают значения
коэффициентов наклона ЛАХ в окрестности
этой частоты, т.к. именно здесь весовой
множитель максимален.
наибольшее влияние оказывают значения
коэффициентов наклона ЛАХ в окрестности
этой частоты, т.к. именно здесь весовой
множитель максимален.
Формула (11.1) не пригодна для практического
использования в виду громоздкости. Для
точного определения ЛФХ можно по ЛАХ
записать передаточную функцию, а по
ней с помощью ЭВМ построить ЛФХ. Для
приближенного (эскизного) построения
ЛФХ можно представить ЛАХ в виде
произведения сомножителей вида:
![]() ,
,![]() и
и![]() ,
где
,
где![]() .
Мы говорим о ЛАХ не имеющих резонансных
всплесков и провалов, после чего для
каждого сомножителя изобразить
соответствующую ЛФХ и получить
результирующую ЛФХ их сложением. Однако
существует простой приближенный способ
определения фазы по ЛАХ минимально
фазовой системы произвольного вида,
не имеющей резонансных всплесков:
.
Мы говорим о ЛАХ не имеющих резонансных
всплесков и провалов, после чего для
каждого сомножителя изобразить
соответствующую ЛФХ и получить
результирующую ЛФХ их сложением. Однако
существует простой приближенный способ
определения фазы по ЛАХ минимально
фазовой системы произвольного вида,
не имеющей резонансных всплесков:![]() (11.2)
(11.2)
где
![]() перепад
(дБ) на интервале шириной две декады с
рассматриваемой частотой
перепад
(дБ) на интервале шириной две декады с
рассматриваемой частотой![]() по середине.
по середине.
Обоснование: ЛАХ произвольного вида
без резонансных всплесков всегда может
быть представлена как сумма ЛАХ типовых
звеньев с передаточными функциями:
![]() ,
,![]() и
и![]() ,
где
,
где![]() .
Для
.
Для![]() и
и![]() формула (11.2) является точной, а для
формула (11.2) является точной, а для![]() приближенная
с максимальной погрешностью
приближенная
с максимальной погрешностью![]() .
Поэтому в силу линейности и справедливости
принципа суперпозиции формула (11.2)
справедлива для произвольной ЛАХ.
.
Поэтому в силу линейности и справедливости
принципа суперпозиции формула (11.2)
справедлива для произвольной ЛАХ.
§12. Детализированные структурные схемы и сигнальные графы.
Детализированная структурная схема – схема содержащая только простейшие звенья, т.е. (в линейной системе) пропорциональные, интегрирующие и дифференцирующие звенья, а также сумматоры. Если передаточная функция системы удовлетворяет условию реализуемости, то для такой системы всегда можно составить ДСС так, чтобы она не содержала дифференцирующих звеньев – по следующей методике:
Представить математическую модель системы в виде совокупностей дифференциальных уравнений первого порядка и возможно еще ряда алгебраических уравнений.
![]() (12.1.а)
(12.1.а)
![]()
![]() (12.1.б)
(12.1.б)
![]()
![]() входы.
входы.
Заменив
 на
на ,
представить (12.1.а) в виде:
,
представить (12.1.а) в виде: (12.1.а’)
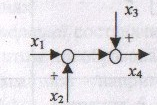
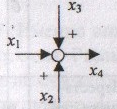
(12.1.а’)По уравнениям (12.1.а’) и (12.1.б) изобразить структурную схему, которая и будет ДСС, причём уравнению (12.1.а’) будет соответствовать следующая часть схемы:
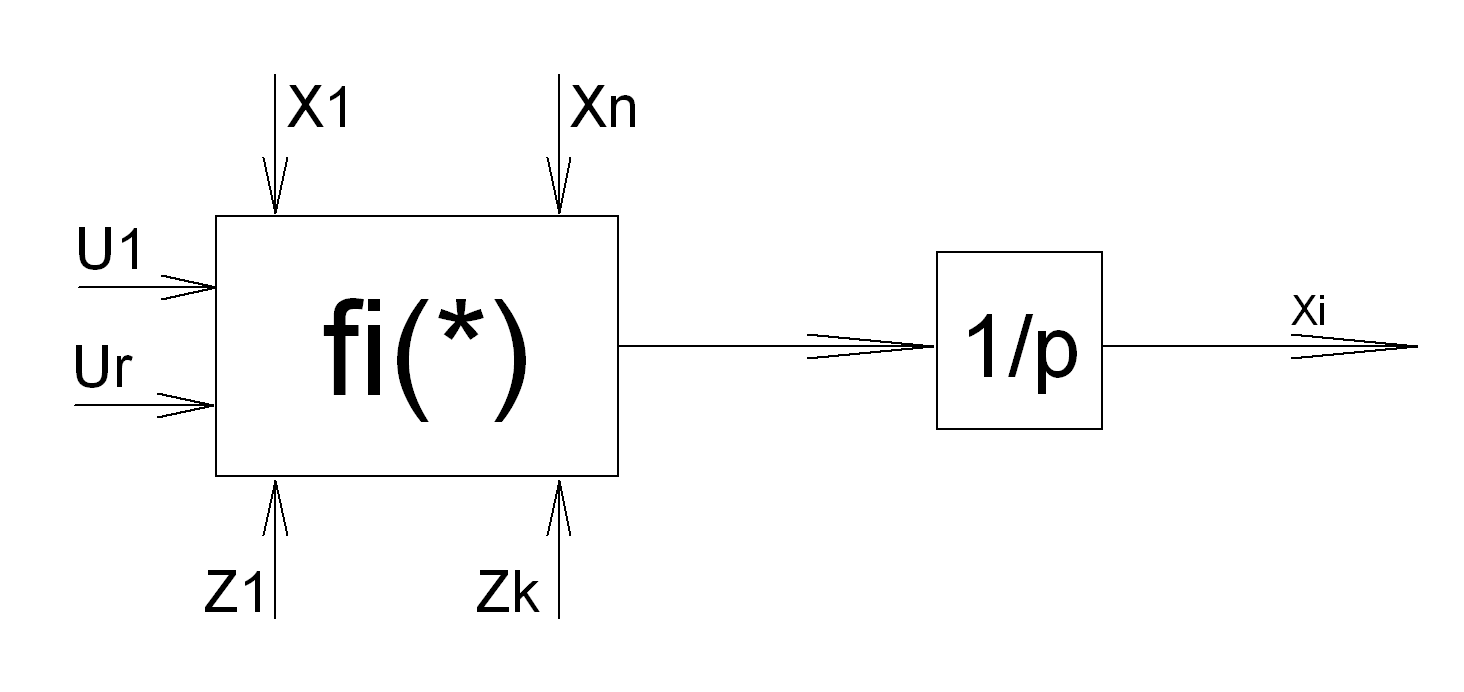
В линейной системе функция
![]() линейна относительно всех своих
аргументов.
линейна относительно всех своих
аргументов.
Предостережение: При получении уравнения (12.1.а’) не приводить подобных членов, а то не получиться ДСС.
§13. Эквивалентные преобразования структурных схем линейной системы.
Назначение: Приведение схемы к виду, когда она содержит только типовые соединения.
Пусть преобразуемая часть схемы имеет
![]() входов и
входов и![]() выходов.
выходов.
Критерий эквивалентности: В результате
преобразования не должна измениться
ни одна из передаточных функций,
связывающих каждый вход
![]() ,
,![]() с каждым выходом
с каждым выходом![]() .
.
А. Простейшие операции.
|
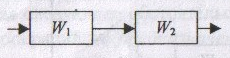
Перестановка звеньев |
|
|
|
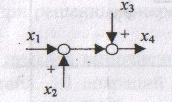
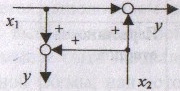
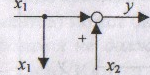
Перестановка сумматоров |
|
|
|
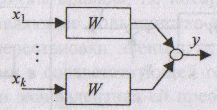
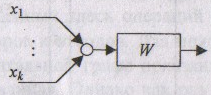
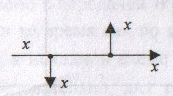
Объединения и разделения сумматоров |
|
|
|
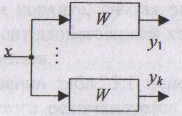
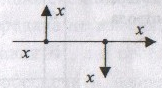
Перестановка отводов |
|
|

Б. Основные операции.
|
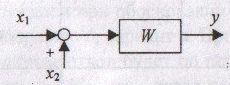
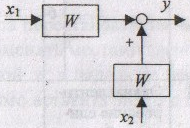
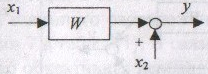
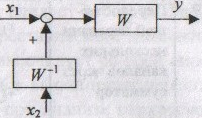
Перестановка звена и сумматора |
|
|
|
|
| |
|
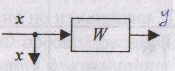
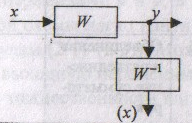
Перестановка звена и отвода |
|
|
|
|
| |
|
Перестановка сумматора и отвода |
|
|
|
|
|



В. Вспомогательные и производные операции.
|
Эквивалентирование единичной передачи |
|
|
|
|
|
|
|
|
|
|